
遗传-SQP优化算法在共形阵中的运用
2015-02-21 02:15诸洁琪陈伏虎第七一五研究所杭州310023
声学与电子工程 2015年2期
关键词:遗传算法
诸洁琪 陈伏虎(第七一五研究所,杭州,310023)
遗传-SQP优化算法在共形阵中的运用
诸洁琪 陈伏虎
(第七一五研究所,杭州,310023)
摘要根据共形阵的特点,提出了一种适用于共形阵的遗传-SQP优化算法,并通过仿真实验对该方法进行了理论验证,分析了指向性提高效果。
关键词遗传算法;SQP算法;加权;共形阵;波束形成
共形阵可以充分利用空间,扩大基阵尺寸,从而降低工作频率,减小传播损耗,是提高声呐性能的一个有效手段,同时在船体布置方便,占用舱内空间小,因而受到研究人员的广泛重视。共形阵的指向性很大程度上取决于阵的几何结构以及阵的加权方法。基阵几何尺寸设计包括基阵轮廓形状及基阵阵元位置的优化设计,对共形阵来说基阵轮廓形状由舰艇外形决定,因此主要优化方向为阵元位置优化。同样,由于共形阵形状的复杂性,基阵常规加权方法在共形阵上也并不适用。共形阵由于其不对称性,形成波束不均衡(不同方向上有不同波束宽度和旁瓣高度),会引起较大的工程误差。本文在传统遗传算法的基础上,提出了一种适用于共形阵的遗传-SQP(序列二次规划)优化算法对共形阵进行了有效阵元选择及加权设计,从而极大地提高了共形阵指向性性能。
1 共形阵分析
虽然共形阵是一种非规则不对称的声基阵,对其指向性分析和设计难度很大,但绝大多数共形阵还是遵循以下基本规则:垂直分层;轴向对称;表面光滑连续;水平维等间距布阵;不同垂直层的二维阵形状相同,但尺寸不同;带声障板的水听器。

图1 圆柱共形阵三维图
根据水平和垂直阵形不同,共形阵可以分为共形柱阵(垂直面为垂直线阵)、共形锥阵(垂直面为倾斜线阵)、共形球阵(垂直阵为圆弧阵)。图1为一种共形柱阵三维图,由于共形柱阵垂直方向上为直线阵,因此根据乘法定理,我们只需要分析水平维共形阵,即可得出共形阵的指向特性。

其中E[• ]表示期望值,v(t)表示基阵时域波束形成输出。在补偿方向ξl上M阵元基阵的时域波束形成输出可表示为:

其中c表示声速,μm表示第m个阵元的时域响应,wm表示第m个阵元的幅度加权。
第m个水听器在声源下的响应由声源信号与水听器在声源位置的脉冲信号响应卷积得到,其中第m个水听器在声源位置的脉冲响应可以通过实验或模型得到:

将式(3)代入式(2)中,可得到基阵在声源下的输出功率谱为:

其中A(ω)是声源α(t )的功率谱。Hm(ω)是声源到第m个水听器的传递函数。
从以上的分析可以得到,基阵在功率谱为A(ω)的单噪声源下的输出功率谱可以用以下矩阵形式表示:

其中(•)∗表示埃尔米特变换,H(ω)为频域传递函数向量[H1(ω),H2(ω),K,HM(ω)],X(w,ω)表示接收信号的处理,包括加权和相位补偿:
由于H(ω)是M元行向量,因此H∗(ω)A (ω)H(ω)即声源下M个水听器接收到的M×M复相关矩阵。
令矩阵M(ω)表示为:

令X(w,ω)表示为:

其中

因此,基阵波束形成输出通用表达式为:

共形阵水平方向上相比圆弧阵,两侧多了两条线阵,从而有效面积得到了扩展,指向性得到改善。图1共形阵选取水平方向37阵元,分别由两侧两条12阵元的线阵和中间120°的13阵元圆弧阵组成,圆弧半径2.86 m,阵元间距均为0.5 m,如图2所示,垂直方向选取6元线阵,阵元间距均为0.5 m。
取单频信号频率为1.5 kHz,则信号波长为1 m,方向为X轴正方向0°,图1共形阵的三维波束图如图3所示,由指向性指数计算公式:

计算得共形阵指向性指数为26.63 dB;同等直径下36元圆柱阵取120°有效弧度,即只取共形阵圆弧部分,指向性指数为23.19 dB,相比共形阵指向性指数低了3.44 dB。

图2 共形阵形状图
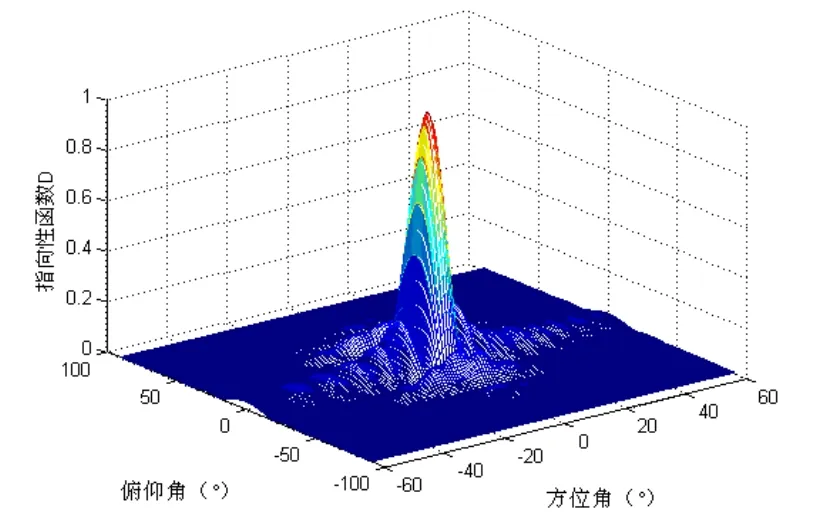
图3 共形阵波束图
2 遗传-SQP优化算法
2.1工作原理
遗传算法是一种基于生物自然选择与遗传机理的随机搜索算法,与传统搜索算法不同,遗传算法从一组随机产生的称为“种群(population)”的初始解开始搜索过程。种群中的每个个体是问题的一个解,称为染色体(chromosome)。染色体是一串符号,比如一个二进制字符串。这些染色体在后续迭代中不断进化,称为遗传。在每一代中用“适应度(fitness)”来测量染色体的好坏,生成的下一代染色体称为后代(offspring)。后代是由前一代染色体通过交叉(crossover)或者突变(mutation)运算形成的。在新一代形成过程中,根据适度的大小选择部分后代,淘汰部分后代。从而保持种群大小是常数。适应度高的染色体被选中的概率较高,这样经过若干代之后,算法收敛于最好的染色体,它很可能就是问题的最优解或次优解。遗传算法流程见图4。
遗传算法的实现步骤如下:
(1)编码:GA在进行搜索之前先将解空间的解数据表示成遗传空间的基因型串结构数据,这些串结构数据的不同组合便构成了不同的点。
(2)初始群体的生成:随机产生M个初始串结构数据,每个串结构数据称为一个个体,M个个体构成了一个群体。GA以这M个串结构数据作为初始点开始迭代。
(3)适应度评估检测:适应性函数表明个体或解的优劣性。对于不同的问题,适应性函数的定义方式也不同。
(4)复制:复制的目的是为了从当前群体个选出优良的个体,使它们有机会作为父代为下一代繁殖子孙。遗传算法通过复制过程体现这一思想,进行复制的原则是适应性强的个体为下一代贡献一个或多个后代的概率大。复制个体实现了达尔文的适者生存原则。
(5)交叉:是遗传算法中最主要的遗传操作。通过交叉可以得到新一代个体,新个体组合了其父辈个体的特性。
(6)变异:首先在群体中随机选择一个个体,对于选中的个体以一定的概率随机地改变串结构数据中某个串的值,同生物界一样,GA中变异发生的概率很低。

图4 遗传算法流程图
遗传算法具有广泛的应用领域,它能直接对结构对象进行操作,适应度函数不受连续可微等条件的约束,并且能够并行计算。但同样的,遗传算法作为一种优化算法,存在自身的局限性:
(1)三个遗传算子的实现有许多参数,如交叉率和变异率,并且这些参数的选择严重影响解的品质,而目前这些参数的选择大部分是依靠经验;
(2)算法对初始种群的选择有一定的依赖性;
(3)算法的并行机制的潜在能力没有得到充分的利用;
(4)算法容易过早出现收敛,从而较难达到全局最优解。
针对遗传算法的缺陷,本文采用序列二次规划(SQP)算法来对遗传算法得到的实数解做进一步优化,从而得到更接近全局最优解的参量。
序列二次规划(SQP)算法是处理非线性约束优化问题很有效的一种方法,算法的优化准则是对优化问题及其约束条件在每一步优化过程中建立二次式优化子问题,并对子问题建立优化搜索方向,通过迭代找到最优解。SQP算法在目标函数及约束条件均为平滑非线性方程时非常有效。对于非线性约束优化问题,算法的一般形式为:
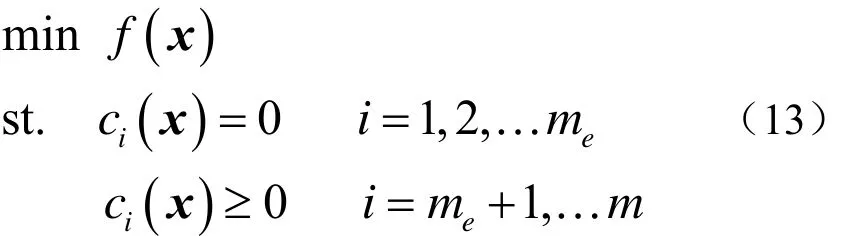
式中,x是设计参数向量,(x∈Rn),f(x)为目标函数,返回标量值,向量函数c(x)返回等式约束和不等式约束在x处的值。
设xk是当前问题的迭代点,根据泰勒级数展开可得目标函数近似为:

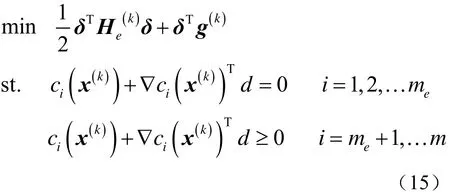
其中g为梯度向量,He为Hessian矩阵。对于给定的规划问题,SQP算法的主要思路是形成基于拉格朗日函数二次近似的二次规划子问题。通过非线性有约束问题线性化可得到二次规划子问题:
SQP算法的实现一般分为三步:
(1)拉格朗日函数Hessian矩阵的更新
在每一次主要迭代过程中,计算得到拉格朗日函数的Hessian矩阵的拟牛顿近似矩阵。更新公式

式中

λi(i=1,2,... m)为对拉格朗日乘子的估计。
(2)二次规划求解
SQP算法的每一次主要迭代过程都要求一次二次规划问题,形式如式(15)所示。求解过程分两步,第一步涉及可行点(若存在)的计算,第二步为可行点至解的迭代序列。在第一步中,需要有可行点作为初值,若当前点不可行,则通过求解下列线性规划问题可以得到一个可行点:
(3)一维搜索和目标函数的计算
二次规划子问题的解生成一个向量dk,它形成一个新的迭代公式:

α为步长参数。
目标函数的形式如下:

式中

2.2目标函数及遗传算子
由式(11)基阵波束形成输出通用表达式为:

令主瓣宽度θBW≤2 θm,本文目标函数定义为副瓣区域波束形成输出最大值,即限定主瓣最大值的情况下得到最小旁瓣:
式中,SLLmax代表方向图最大旁瓣增益;2θm表示主瓣区域宽度,S代表旁瓣区域。
主瓣区域2θm既不能选得过大也不能过小,否则将导致旁瓣出现在主瓣区域或主瓣出现在旁瓣区域的现象。
本设计设定主瓣宽度14°,交叉概率0.8,变异概率0.3,初始种群规模100。遗传算子分别采用:
选择参数:随机均匀分布。该函数布局在一条直线上,每一父辈根据其刻度值按比率对应线上的一部分,算法以相同大小的步长沿线移动。算法根据降落的位置,在每一步确定一父辈,第一步是一小于步长的均匀随机值。
交叉参数:分散交叉函数。它创建一个二进制向量,如果这个向量某位是1,则这个基因从第一个父辈中来,如果为0,则从第二个父辈中来,组合这些基因而形成一个个体。
变异参数:均匀变异过程。根据变异概率选择个体变异部分,选一随机数替换选择的项目。
2.3基阵加权的SQP算法
将遗传算法得到的权值作为初始参量,便可采用SQP算法对权值做进一步优化。目标函数式(22)是关于加权系数向量W的正定二次型的平滑函数,线性约束条件也显然是平滑的,因此SQP可以有效解决最优化问题。
根据泰勒级数展开算法,可得基阵加权序列二次规划法的QP子问题为:

其中

QP子问题中搜索方向定义为:

由式(23)的约束条件可得新约束条件:

确定搜索方向δ后,即可根据当前加权向量W(k )及搜索方向得到下一步迭代的加权向量:

其中α(k )为求得的第k步迭代的步长。根据式(24),在W= W(k)+ δ(k )时达到最小值,即α(k)=1,但为保证W(k+1)在约束条件内,必须加上非负步长α(k ):

由式(28)可得步长α(k )的取值范围为:
由于α(k )为非负实数,因此式(29)可忽略,可得第k次迭代的步长α(k )取值为:

根据式(24)、(26)、(27)、(31)即可由SQP算法得到最优加权向量W。
3 实验仿真
由于共形柱阵垂直方向上为直线阵,因此根据乘法定理,我们只需分析水平维共形阵,即可得出共形阵的指向特性。采用图2所示的线共形阵,水平方位补偿角为0°。若考虑障板导致的阵元本身的指向性,则取阵元指向性为E(φ)=cos (ϕ− ϕi),其中ϕ− ϕi≤π2,ϕi为圆周第i个阵元的法线方向,ϕ为信号的方位角。
常规均匀加权下,共形阵的指向性图如图5所示,波束宽度为4.54°,旁瓣级为−13.7 dB;采用遗传算法,对共形阵有效阵元进行优化,减少有效阵元数量,从而以最少阵元实现最优指向性。图6为算法运算过程及得到的最优值,其中左上图为种群目标函数最优值及平均值,右上为最优个体,左下图为种群目标函数的最大值、最小值及平均值,右下为遗传代数进程。图7为遗传算法得到的最优有效阵元,1代表是元工作或有效,0代表阵元不工作或无效。图8为以最优有效阵元计算得到的共形阵指向性图,其中波束宽度为5.4°,旁瓣级为−18.5 dB。从图中结果可以看出,采用遗传之后,各方向上旁瓣近似相等,指向性明显提高,其中波束宽度略微变宽,旁瓣级降低了3.8 dB。
若只采用SQP算法对共形阵进行加权优化,以均匀加权作为初值进行计算,得到的指向性图及幅度加权如图9及图10所示。其波束宽度为5.9°,旁瓣级为−21.4 dB。

图5 共形阵均匀加权指向性图

图6 遗传算法运算过程及结果

图7 共形阵最优有效阵元
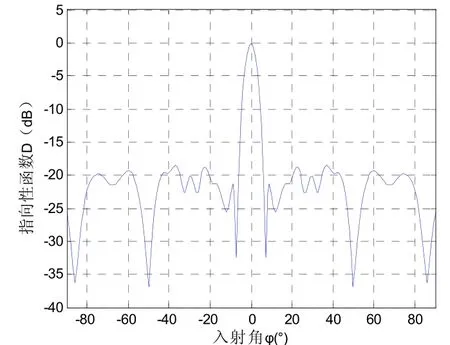
图8 采用最优有效阵元后共形阵指向性图

图9 SQP算法加权后共形阵指向性图
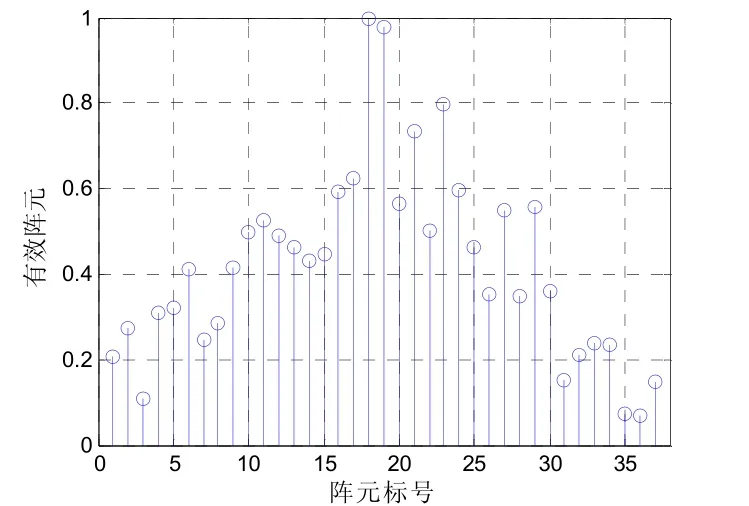
图10 SQP算法阵元幅度加权
图11为采用遗传-SQP优化算法的运算过程及得到的最优值,图12为遗传算法得到的权值在经过SQP算法后得到的最优阵元幅度加权,图13为以最优有效阵元计算得到的共形阵指向性图,其中波束宽度为5.5°,旁瓣级为−28.8 dB。从图中结果可以看出,采用遗传-SQP算法之后,与切比雪夫算法类似,各方向上旁瓣近似相等,指向性明显提高。相比于只采用SQP算法加权,遗传-SQP算法初值更接近最优值,因此效果更加理想,其主瓣宽度比SQP加权算法结果小了0.4°,旁瓣级小了7.4 dB。

图11 遗传算法运算过程及结果

图12 共形阵最优阵元幅度加权

图13 采用最优阵元加权后共形阵指向性图
4 结论
本文方法结合了遗传算法与SQP优化算法的优点,有效解决了传统的遗传优化算法受参数选择影响大、过早收敛、难达到全局最优解等缺点,在遗传算法计算得到的次优解的基础上对非线性目标函数进行二次优化,从而使得到的解接近全局最优解,且计算过程收敛速度快、效果稳定,是解决共形阵波束优化问题的一种非常有效的方法。通过实验仿真可知,遗传-SQP算法能在保障主瓣宽度的基础上有效降低共形阵波束图旁瓣,解决共形阵波束不均衡问题,提高指向性性能。但是,本文提出的优化算法并未考虑到潜艇自噪声及流噪声等近场非均匀噪声的影响,由此可能会导致算法在实际共形阵的使用中无法得到理想的效果,因此需要在实际情况中进一步对近场噪声进行优化。
参考文献:
[1] HAUPT R L. An introduction to genetic algorithms for electromagnetics[J]. IEEE Antennas and Propagation Magazine,1995,37(2):7-15.
[2] YAN K K,LU Y. Sidelobe reduction in array-pattern synthesis using genetic algorithm[J]. IEEE Transactions on Antennas and Propagation,1997,45(7):1117-1122.
[3] 周福洪.水声换能器及基阵[M]. 北京:国防工业出版社,1984.
猜你喜欢
汽车工程(2021年12期)2021-03-08
测控技术(2018年2期)2018-12-09
石油地球物理勘探(2017年2期)2017-11-23
池州学院学报(2017年3期)2017-10-16
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
水利规划与设计(2016年9期)2017-01-15
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
现代计算机(2016年34期)2016-02-28
舰船科学技术(2016年1期)2016-02-27
