一种新的构建序列影像与呼吸信号对应关系的方法
2015-02-21 02:37崔学理刘仰川
江苏大学学报(自然科学版) 2015年2期
崔学理,刘仰川,夏 威,高 欣
(1.中国科学院苏州生物医学工程技术研究所,江苏苏州 215163;2.中国科学院长春光学精密机械与物理研究所,吉林长春 130000;3.中国科学院大学,北京 100049)
影像导航手术中,呼吸运动是引起病灶定位不准确的重要因素之一,因此需要构建肺部组织的运动模型,模拟和预测呼吸运动对病灶的影响,提高病灶定位的速度和精度[1-2].
为了构建肺部呼吸运动模型,需要同时获取4D CT与呼吸信号,并确立二者之间的对应关系.4D CT包含有多个时间点的3D CT.呼吸信号通常包括潮气量、压力、位移,对应的测量方法各不相同[3-6].其中肺量测定法和压力差测定法是测量潮气量和压力,此2种方法设备要求和成本均较高,且操作复杂;荧光监测法是测量植入体内病灶部位或周围组织的荧光标记物的位移,虽然荧光标记物的运动与体内病灶运动的相关性较好,但荧光标记物的植入过程可能导致严重的副作用,如气胸等;而运动追踪法是测量体外标记物的位移,该方法所需设备简单,操作容易,不会对病人造成伤害.
在上述所有测量方法框架下确定4D CT与呼吸信号对应关系时,可根据受试者呼吸模式的不同分为屏气模式和自由呼吸模式.屏气模式中,受试者在一个呼吸周期内多个时相点位置,采用屏气方式,同步获取CT图像与呼吸信号,由此可直接确定CT图像与呼吸信号的对应关系.该模式过程繁琐,且不易控制获取信息时的呼吸状态,不适合呼吸功能障碍患者;而且屏气状态与自由呼吸状态下肺部组织运动存在差异性,导致对应误差.自由呼吸模式中,受试者在自由呼吸状态下,进行CT序列图像和呼吸曲线的同步获取,再通过对应关联法(如梯度对应关联法[7]),建立 CT图像与呼吸信号的对应关系.该模式适用于任何受试者,在临床中具有广泛的应用前景.然而CT图像和呼吸信号的采集缺少同步信号,很难精确地建立二者一一对应关系.
文中提出一种新的构建序列影像与呼吸信号对应关系的方法,在运动追踪法框架下,利用双目立体视觉系统,采集红外标记物的位移作为人体呼吸信号,同时获取受试者深呼吸模式下的4D CT;再结合体外标记物的距离移动信息,构造距离测度函数,提出距离对应关联法,通过标记物相同时间段内在4D CT中和呼吸信号中的位移量的比较,确定4D CT和呼吸信号的对应关系.
1 材料与方法
1.1 4D CT和呼吸信号的获取
使用 Toshiba Aquilion ONE 320-slice CT扫描仪,采用“Lung mass perfusion”扫描模式采集 4D CT,该CT扫描仪能够完成自主呼吸状态的肺部动态扫描.同时,使用实验室自行研制的双目立体视觉系统采集红外标记物的位移数据,该系统由红外标记物、2部可以检测红外线的相机和1部控制计算机组成,红外标记物为一个120°投射角、直径5 mm的红外发光二极管,系统采样率为30 Hz.
数据采集时,受试者静卧在CT扫描床上,将红外标记物粘贴于受试者胸部剑突位置的体表,并指导受试者做自由深呼吸.首先开启双目立体视觉系统,采集红外标记物位移数据;待受试者深呼吸平稳后,再启动CT扫描仪进行肺部动态扫描,试验场景如图1所示.

图1 试验场景
获取受试者在深呼吸模式下m个连续的3D肺部 CT 图像I={Ii|i=1,2,…,m},i为获取图像Ii的时刻点,Δt为相邻2图像间的时间间隔.此外,获取受试者呼气末相(屏气状态)3D肺部CT图像Iref.双目视觉系统记录红外标记物的空间坐标D={Dj|j=1,2,…,n},Dj=(Djx,Djy,Djz)为第j个时间点的空间坐标.
1.2 CT图像与标记物空间坐标的匹配
1.2.1 梯度对应关联法
利用高斯平滑滤波器对采集的呼吸曲线做平滑处理,滤除曲线上非对应于吸气末或呼气末的波峰和波谷;求取曲线上所有点的梯度,将梯度为0的点与该点附近最接近于受试者吸气末或呼气末状态的3D CT对应;最后根据CT扫描仪和双目立体视觉系统的采样频率确定4D CT与呼吸信号的对应关系[7].
1.2.2 距离对应关联法
因不能确保受试者吸气末或呼气末肺部组织的实时解剖结构与选取作为肺部组织吸气末或呼气末状态的3D CT相一致,导致对应误差.为此,文中结合体外标记物的距离移动信息,构造距离测度函数,提出距离对应关联法.
双目视觉系统每秒记录红外标记物30个空间坐标,CT扫描间隔Δt为1.5 s,通过二者的采样频率,可得出,每获取相邻2个3D CT,双目视觉系统记录标记物46个空间坐标(45个采样间隔).记标记物在4D CT中的坐标C={Ci|i=1,2,…,m},Ci=(Cix,Ciy,Ciz)是标记物在第i个时间点的CT图像Ii中的坐标,则距离测度函数F的计算公式如下:

式中:qr(r=1,2,3)为3D CT 图像x,y,z在3 个方向上的空间分辨率;m-1为获取m个序列3D CT图像的时间间隔Δt的个数.通过计算距离测度函数F可得j使得CT图像I1与标记物空间坐标Dj相匹配,即I1与Dj是在同一时刻获取的,进而可确定序列3D CT图像I与标记物10个空间坐标的一一对应关系.
1.3 构建肺部呼吸运动模型
利用基于空间信息与灰度信息的3D图像弹性配准方法[8],匹配4D CT 图像I={Ii|i=1,2,…,m}与参照图像Iref,获得变形场T={Ti|i=1,2,…,m}.第i时刻标志点的形变位移为

采用最小二乘法线性拟合标志点i个时刻的形变位移dr与对应时刻标记物的空间坐标Dj,构建肺部呼吸运动线性模型[9-11].
2 试验结果
利用上述方法,获取了一位受试者在自由深呼吸模式下的4D CT图像Ii(i=1,2,…,10)和参照图像Iref,图像大小为512×512×320、空间分辨率为0.677 mm×0.677 mm×0.500 mm.且在CT数据采集过程中,利用双目视觉系统全程记录了受试者在呼吸时标记物的空间坐标D.
根据采集的数据计算距离测度函数F,确定了4D CT中Ii(i=1,2,…,10)对应的标记物的10个相对空间坐标.图2给出了呼吸周期中,4D CT获取时间点的示意图,图中蓝圈为双目立体视觉系统记录的标记物x轴上的坐标,红色星点为4D CT采集时刻点.

图2 x轴方向4D CT在呼吸周期上的位置
分别利用距离对应关联法和梯度对应关联法获得序列影像与呼吸信号的对应关系,并结合4D肺部CT图像Ii(i=3,4,…,8),分别构建肺部呼吸运动线性模型.利用模型误差(model error,rME)验证模型的精度,其计算公式如下:
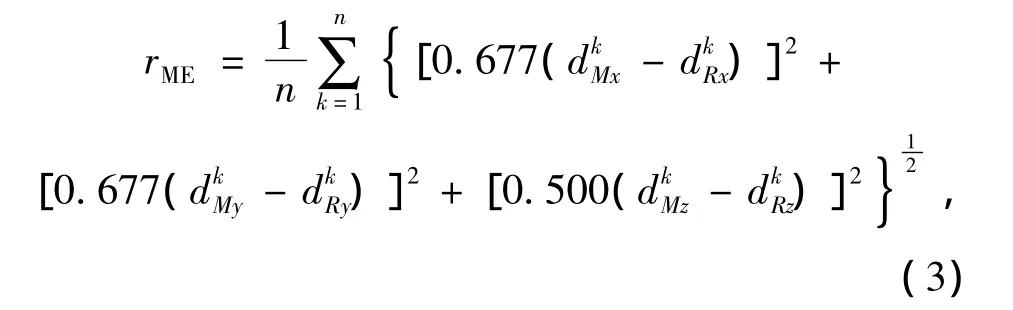

图3 标志点分布示意图
分别采用距离对应关联法和梯度对应关联法构建序列影像与呼吸信号的对应关系,并在确定的对应关系下分别构建肺部运动线性模型.计算1与9这2个时刻对应的rME,计算结果列于表1中.其中PCM表示梯度对应关联法,DCM表示距离对应关联法.rME以平均值mean和标准差sd的形式给出.

表1 模型误差的对比结果 mm
由试验结果可看出,基于距离对应关联法构建的运动线性模型的模型误差在2.5 mm以内.相比于梯度对应关联法,尽管第1时刻模型误差的标准差增高了3.6%,但模型误差的平均值减少了14.6%;且第9时刻模型误差的平均值和标准差减少均超过10%.
3 结论
1)所提出的构建序列影像与呼吸信号对应关系的方法简化了数据获取的操作步骤,提高了序列影像与呼吸信号对应的准确度;且在采集4D肺部CT图像时受试者无需长时间屏气,有利于特定患者(如呼吸功能障碍患者).
2)该方法克服了受试者在屏气状态与自由呼吸状态下肺部活动存在差异性的问题.
3)试验结果表明,构建肺部呼吸运动线性模型时,相比于梯度对应关联法,所提方法降低了模型误差,对于建立肺部呼吸运动模型、实现计算机手术导航有很大帮助.
References)
[1]Ehrhardt J,Lorenz C.4D Modeling and Estimation of Respiratory Motion for Radiation Therapy[M].Tennessee:Springer,2012.
[2]McClelland J R,Hawkes D J,Schaeffter T,et al.Respiratory motion models:a review [J].Medical Image Analysis,2013,17(1):19-42.
[3]Fayad H,Pan T,Clément J F,et al.Technical note:correlation of respiratory motion between external patient surface and internal anatomical landmarks[J].Medical Physics,2011,38(6):3157-3164.
[4]Ernst F,Bruder R,Schlaefer A,et al.Correlation between external and internal respiratory motion:a validation study[J].Int J Comput Assist Radiol Surg,2011,6(5):483-492.
[5]Fayad H,Pan T,Pradier O,et al.Patient specific respiratory motion modeling using a 3D patient's external surface[J].Medical Physics,2012,39(6):3386-3395.
[6]文丽丽,罗红艳,张绍祥,等.基于运动跟踪获取人体呼吸曲线的初步研究[J].中国生物医学工程学报,2012,31(4):512-517.
Wen Lili,Luo Hongyan,Zhang Shaoxiang,et al.A preliminary study of acquiring the respiratory curve based on motion tracking[J].Chinese Journal of Biomedical Engineering,2012,31(4):512-517.(in Chinese)
[7]McClelland J R,Blackall J M,Tarte S,et al.A continuous 4D motion model from multiple respiratory cycles for use in lung radiotherapy[J].Medical Physics,2006,33(9):3348-3358.
[8]夏 威,高 欣,王 雷,等.基于点集与互信息的肺部CT图像三维弹性配准算法[J].江苏大学学报:自然科学版,2014,35(5):558-563.
Xia Wei,Gao Xin,Wang Lei,et al.3D deformable registration algorithm of CT lung images based on point set and mutual information[J].Journal of Jiangsu University:Natural Science Edition,2014,35(5):558-563.(in Chinese)
[9]Li R,Lewis J,Jia X,et al.On a PCA-based lung motion model[J].Physics in Medical and Biology,2011,56(18):6009-6030.
[10]Chang K H,Ho M C,Yeh C C,et al.Effectiveness of external respiratory surrogates for in vivo liver motion estimation[J].Medical Physics,2012,39(8):5293-5301.
[11]McClelland J R,Hughes S,Modat M,et al.Inter-fraction variations in respiratory motion models[J].Physics in Medicine and Biology,2011,56(1):251-272.
[12]Murphy K,van Ginneken B,Pluim J P W,et al.Semiautomatic reference standard construction for quantitative evaluation of lung CT registration[C]∥Proceedings of2008 11th Medical Image Computing and Computer-AssistedIntervention. New York:SpringerVerlag,2008:1006-1013.
猜你喜欢
中国心血管杂志(2022年2期)2022-11-25
中国心血管杂志(2022年4期)2022-11-25
新世纪智能(数学备考)(2021年9期)2021-11-24
中国心血管杂志(2021年6期)2021-01-02
国际呼吸杂志(2019年21期)2019-11-25
国际呼吸杂志(2019年20期)2019-11-23
当代陕西(2019年15期)2019-09-02
国际呼吸杂志(2019年8期)2019-04-29
国际呼吸杂志(2019年2期)2019-02-14
中国心血管杂志(2019年3期)2019-01-04