基线固定条件下无源定位配置仿真分析
2015-02-22 03:04郭徽东
雷达与对抗 2015年4期
关键词:配置
郭徽东
(海军92403部队51分队,福州 350007)
基线固定条件下无源定位配置仿真分析
郭徽东
(海军92403部队51分队,福州 350007)
摘要:根据圆概率误差和定位模糊区定位精度指标,对基线固定条件下无源定位最优交会角进行分析。利用函数极值点法则计算定位精度指标理论极值,给出定位精度CEP等值曲线,并验证测向定位布站配置的有关结论。
关键词:无源测向系统;无源定位;基线固定;配置
0引言
由于无源测向系统具有全方位、探测距离较远且在受到干扰的情况下仍能正常工作等优点,因此无源测向定位技术在军用和民用领域都具有重要的应用价值。目前,研究如何利用无源传感器的合理布局来提高定位精度相对较少[1-2],且相关理论研究成果相对不成熟,对定位精度研究仍没有具体量化指标。文献[1]研究了基线到目标垂直距离量为常数条件下目标定位模糊区和圆概率误差的极值问题,其研究条件对于海上目标运动实际而言不一定适合。文献[3]研究了基线固定条件下圆概率误差达到最小值时测向线交会角所满足的必要条件,同时还分析了测向交叉定位系统中定位模糊区面积达到最小值的必要条件。文献[4]推导后认为当侦察站与雷达成等边三角形时模糊区面积最小。本文研究在基线相对固定条件下不同定位指标方法之间定位精度的一般分布和最优配置角度,对实现无源站效能最大化,充分发挥无源站前置效果和“静默”特点,提高对目标的无源定位精度具有重要意义。
1误差衡量标准
如图1所示,设有一辐射源位于XY平面的E点(xe,ye)。在两个侦察站“1”(x1,y1)和“2”(x2,y2)上对辐射源测向,测得的方位角分别为θ1和θ2(以方位基线为基准)。两个位置线的夹角为β(无源定位交会角),辐射源到方位基线的距离为R,两个无源站之间距离为L(为常数)。根据已知的点“1”和“2”坐标(x1,y1)、(x2,y2)和方位角θ1、θ2便可确定辐射源点的坐标(xe,ye)。由于测向总是存在误差,所以会产生对雷达的定位误差。因内部噪声的影响,在方向角测量过程中出现的随机测向误差会使不同传感器两条测向线的交点围绕着真实点(xe,ye)随机分布,在辐射源附近形成一个定位模糊区。根据文献[4]的计算,以△θ1、△θ2表示两个无源观测站的测角误差,以△D1、△D2表示目标实际位置相对两个无源观测站交叉定位的距离误差,则上述定位模糊区可用四边形来近似表示为
图1 双站无源定位图
(1)
当测量误差较小时,可用微分代替增量的办法对定位误差进行分析,可得
(2)
无源定位系统中通常采用两种指标来衡量目标定位精度,一种是圆概率误差(CEP),是指目标落入内部的概率为50%的误差分布圆半径,此时的定位误差等概率轮廓线为一个椭圆[1],圆概率误差表现形式见式(2);另一种是定位模糊区,当目标到基线的垂直距离作为参变量时,文献[1]认为当无源站与目标成等边三角形时模糊区面积最小,表现形式见式(1),文献[4]给出了达到最小定位模糊区面积时多个被动传感器的布站准则,认为该准则下的最优交会角也满足定位模糊区达到最小值的必要条件。上述文献以模糊区面积最小为极值条件,推导达到极小值条件下的最优交会角、布局态势,但一次求导得到的函数点并非是全局极小点,不能作为实际应用的理论依据。
2无源定位配置极值分析
为简单起见,定位模糊区位置误差用近似四边形来描述,如图1所示。两无源站之间的距离为L,四边形面积可用式(1)表示。
令f(θ1,θ2)=sin-3(π-θ1-θ2)sinθ1sinθ2,因L,△θ1,△θ2为常数,则可利用f(θ1,θ2)对θ1,θ2求导,可得
(3)
(4)
文献[1,4]依据极小值原理,∂f(θ1,θ2)/∂θ1=0,∂f(θ1,θ2)/∂θ2=0,分别对上述两式进行求解,得sin2θ1=0.25。根据三角几何关系:θ1=±30°,θ2=±150°,认为此时该四边形近似模糊定位区的面积最小。最小模糊定位区的面积为
(5)
但是,模糊四边形面积为标准的定位配置效果并非如文献[1,4]论述,只利用一次求导得出的函数极小是错误的,必须通过二次求导并验证其值,才能确定模糊四边形面积方法是否确实有效[5]。下面引入函数极值点第二法则。设点是静止点:
(6)
又函数f(x)不仅在这点的一个领域内有一阶导数f′(x),而且在点x0处还有二阶导数f″(x0),那么就可以把一切的检验都转化为对于f″(x0)符号的考察,这里假定f″(x0)不为零。把x0代入二阶导数f″(x0)内,若f″(x0)>0则函数有极小,若f″(x0)<0则函数有极大。根据第二法则,下面利用式(3)、(4)分别对θ1,θ2进行求二次导数。令N=4L2△θ1△θ2,则有
(7)
(8)
令β=π-θ1-θ2,则有

12sin-5βcos2βsinθ1sinθ2-3sin-3βsinθ1sinθ2+
3sin-4βcosβcosθ1sinθ2)
(9)
12sin-5βcos2βsinθ1sinθ2+3sin-3βsinθ1sinθ2-
3sin-4βcosβsinθ1cosθ2)
(10)
根据第二法则,二阶导数f″(x0)即式(9)和式(10)表示的f(θ1,θ2)/∂2θ1、f(θ1,θ2)/∂2θ2在文献[1,4]所确定的θ1=±30°,θ2=±150°处,其值应大于零,此时函数(5)才有全局极小值,即达到最优配置条件。因式(9)、(10)表达式较为繁琐,无法简单判断其变化规律,下节以数值分析的方式对二阶导数进行判断。
3计算分析
3.1 极值计算
根据式(9)、(10),对模糊面积公式的二次导数进行典型抽样仿真,分别对主辅站与目标形成等腰三角形时的二次导数进行数值计算。

图2 二次导数值
根据第二法则,求θ1的二次导数并进行数值计算。当辅站固定测向角0°-60°时(主站与副站成等腰三角形配置),从图2中看出,此时f″(θ1)<0,不满足f″(θ1)>0函数有极小值的条件,说明文献[4]认为无源站与目标成等腰三角形(30°/150°)时模糊区面积最小的结论是错误的。基线固定条件下,以模糊四边形面积为指标的双站无源定位的模糊区不存在全局最小值,模糊四边形面积值一般变化规律为从一个无限大值逐渐减小,其极限趋向零,或从无限接近零的正值逐渐增大,函数无极大值,依据模糊区面积指标无法实现布站最优配置。同理,对θ2的二次导数进行数值计算,有f″(θ2)<0,不满足f″(θ2)>0有极小值的条件。
3.2 定位误差
上节是从极值理论角度对定位模糊区、圆概率误差函数进行分析。为更直观地显示定位误差CEP与测向站与目标夹角之间的关系,对典型的侦察站测向定位误差进行仿真分析。
测向站参数设置如下:
主站和辅站测向误差方差为σθ1=σθ2=1.5°,基线长度L=100km。对模糊四边形面积和圆概率面积进行数值模拟,图3、图4绘出无源站与目标构成三角关系中无源定位模糊四边形面积和圆概率误差极小值。图3为模糊四边形面积变化曲线,曲线呈锯齿状,变化无规律。θ1、θ2其中一个接近0°的小锐角,一个接近90°的角度,即造成目标定位精度较高的位置在侦察站1附近并远离侦察站2,或者在侦察站2附近并远离侦察站1。这种态势的发生无实际意义。由图4看出圆概率误差极小值曲线有规律,成对称分布。根据文献[3]和数值仿真结果,验证圆概率误差为指标时,无源定位最优交汇角为β=110°,侦察站目标角为θ1=θ2=35°。

图3 模糊四边形面积最小值变化

图4 圆概率误差最小值变化
图5 σθ1=σθ2=1.5°圆概率误差等值线图

图6 σθ1=σθ2=3°圆概率误差等值线图
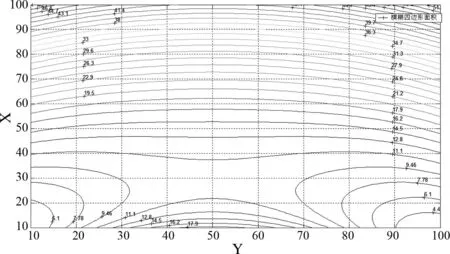
图7 σθ1=σθ2=1.5°模糊四边形面积等值线图

图8 σθ1=σθ2=3°模糊四边形面积等值线图
图5~图8分别为σθ1=σθ2=1.5°,σθ1=σθ2=3°时无源定位圆概率误差和模糊四边形面积等值线图。根据理论推导和结论分析,以两无源站之间的组网无源定位概率圆与模糊四边形面积等值线图为例,实际分析无源定位配置使用。
从圆概率误差等值线(图5、图6)中可以看出,如果等值线绘制足够密,圆概率误差极小值就会以更小的封闭椭圆的形式表现出来,并且概率圆面积的最小值为基线垂直平分线上。结合文献[1-3]可以得出,基线固定条件下无源定位精度最优交会角为110°,两个无源观测站和目标呈等腰三角形分布。
从模糊四边形面积等值线(图7、图8)中可以看出,其最小值并不分布在两站配置的中间部分,一般分布为离侦察站越近其定位模糊四边形面积越小,侦察站附近且交会角较大时其定位模糊四边形越小。从等值线趋势上看,模糊四边形面积值会有一个鞍点,也就是局部极小值,其点也在基线的垂直平分线上。但是,从整图和数据结果分析上看,模糊四边形面积无极小值,越是靠近基站其值越小。综合模糊四边形面积等值图和理论推导结果:无源站基线固定条件下,以模糊四边形面积为指标的双站无源定位无法实现最优配置;模糊四边形面积值一般变化规律为从一个无限大值逐渐减小,其极限趋向零;或从无限接近零的正值逐渐增大,函数无极大值。
由于模糊四边形和圆概率误差两种定位指标是不同的定位指标方法,圆概率误差一般设置在50%,其面积一般与测向误差紧密相关。如果提高其落入概率值,圆概率将有所增大。而模糊四边形面积的变化不仅依赖测向误差,侦察站和目标的三角关系极大影响其面积大小。应当将两种方法进行综合运用,以达到更好的效果。
4结束语
本文分析了无源定位中的定位模糊区和圆概率误差问题,依据二次导数推导了以定位模糊区面积为定位指标的配置。无源定位站基线固定时不存在极值点。同时仿真实现基线固定条件下两个无源传感器定位模糊区面积、圆概率误差等值曲线,得出了相关的结论。上述问题的研究对于实现无源观测站的合理配置和优化选择、提高定位精度具有一定的借鉴意义。
参考文献:
[1]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[2]罗景青.雷达对抗原理[M].北京:解放军出版社,2003.
[3]修建娟,何友,王国宏,董云龙.测向交叉定位系统中的交会角研究[J].宇航学报,2005,5(3).
[4]修建娟,王国宏,何友.修建华.纯方位系统中的定位模糊区分析[J].系统工程与电子技术,2005,8(8).
[5]WalterRudin.数学分析原理[M].赵慈庚,蒋铎,等译.北京:机械工业出版社,2000.
Simulation analysis of passive location configuration under
condition of fixed baseline
GUO Hui-dong
(Team 51, Unit 92403 of the PLA Navy, Fuzhou 350007)
Abstract:According to the circular error probability (CEP) and the location accuracy index in the location ambiguity area, the optimal cut angle for the passive location is analyzed under the condition of the fixed baseline. The theoretical extreme values of the location accuracy are calculated through the extreme point rule of the function with the CEP equivalent curves given. Moreover, the conclusions related to the direction-finding location station distribution and configuration are verified.
Keywords:passive direction-finding system; passive location; fixed baseline; configuration
中图分类号:TN953.5
文献标志码:A
文章编号:1009-0401(2015)04-0007-04
作者简介:郭徽东(1976-),男,工程师,博士,研究方向:雷达数据处理。
收稿日期:2015-05-27
猜你喜欢
成长·读写月刊(2016年12期)2017-01-12
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年26期)2016-12-01
中国市场(2016年41期)2016-11-28
电脑知识与技术(2016年26期)2016-11-24
电脑知识与技术(2016年25期)2016-11-16
数字技术与应用(2016年9期)2016-11-09
财税月刊(2016年3期)2016-06-01
财税月刊(2016年2期)2016-05-17