无人反潜系统自主指挥控制研究
2015-03-11 03:24苏金涛
舰船电子工程 2015年7期
张 起 苏金涛
(1.海装装备采购中心 北京 100841)(2.江苏自动化研究所 连云港 222061)
无人反潜系统自主指挥控制研究
张 起1苏金涛2
(1.海装装备采购中心 北京 100841)(2.江苏自动化研究所 连云港 222061)
无人反潜系统的指挥控制问题是关系其具备实际作战能力的主要问题之一。论文在分析无人反潜系统指控原理和其自主指控水平分级的基础上,采用可变自主控制结构,研究了无人反潜系统分级可变自主指控实现的方法。该方法可赋予无人反潜系统可变的指挥控制自主性,使其在工作环境中能够实时评估自身的自主能力,并主动引入人工干预。这种具备人机智能融合特性的自主指挥控制方法更适应无人反潜系统在复杂战场环境中实战化的需求。
无人; 反潜; 自主; 指挥; 控制; 分级; 可变
Class Number E925
1 引言
无人反潜系统(Unmanned Anti Submarine System,UASS)一般是指用以执行反潜作战任务的自主型UUV(Unmanned Undersea Vehicle)或USV(Unmanned Surface Vehicle)。它以潜艇或水面舰艇为支援平台,在指定区域执行搜索、警戒、监视、诱骗、攻潜以及中继通信等多种任务[1]。作为一种主要遂行反潜作战任务的无人作战系统(Unmanned Combat System,UCS),其有望成为继水面舰艇、潜艇之后新一类的海上反潜作战平台。
UASS区别于有人反潜系统的重要标志是“人在环内,不在机上”[2],作为UASS“大脑”的指挥控制系统(Command and Control System,C2S)必须具备与其任务相匹配的智能控制能力。机上无人、任务复杂性和环境不确定性等因素决定了UASS必须具备很高的自主性,但从目前所能达到的技术水平来看,真正实现非结构化环境下UASS的自主指挥控制是一项具有挑战性的技术难题。
2 UASS指控工作原理
自2000年以来,美军对包括UAV、USV、UUV和UGV等在内的UASS智能指挥控制的要求包括:UASS自主远距离航行时,在无人力控制的情况下,自动收集并传送信息,探测、评估并主动规避威胁和障碍物;在出现不可预知情况及恶劣水文气象条件下,可根据任务目标、周围环境情况和剩余动力,迅速做出反应,自主决策返航或与其他UASS协作,组成编队,协同完成任务[3]。
对UASS指控的界定,可部分借鉴有人系统指控的定义,但UASS指控绝不是有人系统指控概念的移植,这在进行UASS指控系统设计之初就应明确,也是真正意义上的无人作战平台与一般无人平台的主要区别之一。有人系统的指控是其作战指挥与武器控制的简称,其主要功能是情报综合处理、指挥决策和武器综合控制[4]。与有人系统指控的主要区别之处是,UASS的指控缺少了操作人员的实时决策和控制,系统外支援平台的干预具有一定的粒度甚至是没有的,因此需要其具备一定程度的自主能力。
事实上,UASS智能指控系统最重要的功能就是在动态环境下复制任务指挥员的智能或决策。当UASS的C2S具备与任务指挥员相当的智能水平时,其可实现完全的自主控制:依据作战条令,UASS与有人系统的表现并无二异,其与有人系统在作战过程中处于对等的地位,这也是无人系统发展的方向。在目前UASS的C2S的智能水平明显低于任务指挥员的智能水平的情况下,面对不确定性环境和复杂任务,单靠UASS的C2S并不能保证其达到任务指挥员的期望,任务指挥员的智能介入显然是不可或缺的,实现任务指挥员的智能与无人系统的智能的融合,是UASS甚至UASS指控体系结构设计中的重要内容。
考虑到对UASS指控的要求和当前的技术水平,UASS指控的工作原理可用图1表示,主要包括平台行为控制、行为决策控制和支援平台控制三个部分[5]。图1所示的UASS指控的原理,主要从系统行为表现方面进行描述,其中平台行为控制是UASS个体行为,属于自动控制范畴;自主行为决策控制和支援平台控制紧密结合,实现UASS分级自主指控,属于自主控制范畴。

图1 UASS指控工作原理框图
平台行为控制主要包括反潜武器及器材控制、传感器控制和平台运动控制。反潜武器及器材控制和平台运动控制通过改变UASS的行为和运动状态作用于战场环境;再通过传感器控制完成对战场环境的不断探测,实现实时战场态势感知。
行为决策控制根据战场态势、战术知识和作战规则实时做出战术决策、实施动作规划和执行战术动作,为UASS平台行为控制发出相应的命令和控制信号。在行为决策控制中,C2S根据战场态势,进行任务冲突预测,对当前自主等级需求进行判定,并与支援平台控制形成响应,实现C2S可变的自主指控等级。
支援平台控制与UASS行为决策控制交互,用于监督和管理UASS。在UASS分级自主指控结构中,支援平台控制除对UASS的任务分配和任务监测外,还需要响应UASS指控系统自主等级调整需求,对UASS指控进行响应,根据需要及时介入任务指挥员操作,对UASS指控进行“智能支援”。UASS指控中所采用的分级自主指控等级体系结构,使其可按需所取的向任务指挥员进行智能索取,使UASS由“被动自主”转向“主动自主”。
3 UASS分级可变自主指控
UASS发展规划中,其与有人系统具有相当的智能水平是最长远的目标之一。从UASS工作环境不确定性、任务复杂性、人工智能水平以及其它制约条件看,其脱离任务指挥员的监督和操控而完全自主运行在相当长时间内更是难以实现的。随着UASS信息化和智能化水平的提高,人机智能融合的交互控制逐渐处于主导地位。为了实现人机智能融合的UASS指控,需要根据UASS指控的能力将其划分成几种具有不同自主能力的自主等级模式。在需要的时候通过决策方法确定一种合理的自主等级,自主提示任务指挥员进行任务干预,或者在UASS指控完全胜任任务时忽略任务指挥员的存在完全自主控制。
3.1 UASS自主指控等级
对自主控制等级的划分,有自动等级[6](Levels of automation,LOA)、改进的十层次自主控制等级[7]、三层次自主控制等级划分模型[8]和无人系统自主控制等级框架[9](Autonomy levels for unmanned systems,ALFUS)等方法。UASS指控主要完成UASS执行搜潜、攻潜任务过程中的决策和控制,在其分级自主指控等级体系结构中,其自主行为可在一定程度上类比于有人反潜系统中战术辅助决策与操作员的关系,但是在有人反潜系统中,这种关系是单向不变的,较UASS来讲要简单。结合UASS指控的使用要求和实际特点,从人机交互的角度出发,将UASS自主指控等级划分为全自主、启发、裁断和全人工四个等级,如表1所示。表1中对于UASS自主指控等级的划分,模拟了“完全智能体”(具有完全自主能力)与“部分智能体”(具有部分自主能力)之间交互的过程,符合人类智能交互活动的机理。

表1 UASS自主指控等级的划分
· 全自主:UASS指控具有完全的自主能力,其智能水平与任务指挥员智能水平相当,可以支持UASS在各种复杂环境中完全自主完成各种任务,并且具备不断学习和经验累积的能力。
· 启发:UASS指控向任务指挥员请求必要的辅助信息,以帮助其解决复杂决策问题的求解,任务指挥员提供的信息可明显增加UASS指控自主决策的可靠性和可信度,但不影响其做出决策。
· 裁断:UASS指控可提供一套完整或筛选后的决策或操作选择方案攻任务指挥员决策,或者提供一套决策或操作方案供任务指挥员确认,方案经任务指挥员确认后执行。
· 全人工:任务指挥员根据所分配的任务完成任务决策和对UASS的遥控操作,忽略UASS指控的存在。但任务指挥员需要通过UASS传感器获取环境信息,所以很难完成真正意义上的全人工操作。
3.2 UASS可变自主指控结构
UASS指控系统自主水平的变化是对其所分配的任务与其完成所分配任务的能力之间冲突的消解。这种冲突,主要来源于任务的复杂性和环境的复杂性[10]。任务复杂性就是具体任务所需的子任务和以及相关决策,其可以用UASS任务空间内的具体性能、允许的态势感知和知识需求进行度量。UASS一般是在非结构化环境中运行,环境的复杂性是UASS运行其间最大的未知数,最常见的环境复杂性是指作战区域变化,气候变化、流动性约束条件,作战对象频率、密度和意图,通信限制和依赖关系等。
UASS在执行任务指挥员分配的任务时,通过对任务和环境的理解,指控系统确定其自主等级,控制UASS完成相应的任务;当任务的改变或环境的改变使得再评估的自主等级发生改变时,指控系统决定是否更改自主等级,是否需要任务指挥员的参与,以及参与的内容。例如,UASS执行搜潜任务时,当搜潜海区环境简单时,UASS指控采取全自主方式工作,进行航路规划、航线跟踪以及搜潜器材控制;当发现目标时,取决于环境信息和目标信息的富裕度,决定采用全自主方式工作或启发方式工作,进行目标识别和判定;当需要跟踪潜艇目标至某一边界条件时,可采用启发方式工作或裁断方式工作,决定继续跟踪或放弃;当战场环境异常恶劣条件下,如穿越狭窄航路、雷区等时,可降至全人工方式工作。
UASS可变自主指控的原理可由图2表示。自主指控等级的改变是由可变自主模块实现,其由任务建模、态势评估和自主等级评定三个子模块构成[11]。可变自主模块与支援平台控制、UASS行为及外部环境进行交互,对UASS任务复杂性和环境复杂性进行综合求解,得出可行的决策解决方案。

图2 UASS可变自主指控结构框图
任务建模子模块将任务指挥员分配给UASS的任务进行分解,在任务执行海域环境条件下将任务转换为UASS指控系统可以理解的任务子集和任务支持信息集合,确定UASS需要完成的任务序列。
态势评估子模块主要根据UASS传感器信息和外部支持信息识别出当前的态势,更进一步根据当前态势和相关领域模型推理出未来可能的态势,给出当前态势感知集合。
自主等级评定子模块的主要功能是将任务子集放到态势感知集合中进行考量,评价UASS是否能完成任务,对不能完成的任务给出欠缺说明,最终确定任务子集的自主等级,任务子集的自主等级决定了UASS指控与任务指挥员交互的内容:需要任务指挥员的决策、支援信息、确定命令等。
4 UASS可变自主指控与通信
实现UASS人机融合的可变自主指控的一个前提是UASS与支援平台以及其它系统之间的通信。UASS类型不同,对于通信的要求也相应不同,虽然对于UCAS来讲,其自主水平已经很大程度上不仅仅依赖于计算机技术和通信技术的发展水平,但对于以UUV或USV为平台的UASS来讲,其工作环境决定了通信带宽还是其自主水平的重要制约,这在进行UASS自主指控系统设计之初就要考虑的问题。
随着UASS自主指控等级的变化,UASS指控和任务指挥员在“大系统”中的权利也相应发生变化,权利大的任务指挥员需要在其与UASS之间保持持续的通信,用以传输控制数据的带宽就大;自主性大的UASS指控,与任务指挥员的交互少,所需的通信带宽就小。图3所示是UASS可变自主指控与通信带宽之间的简要关系图,如图所示,任务指挥员的介入程度与UASS指控自主性之间是一种逆反关系[10],任务指挥员与UASS指控之间的通信带宽与UASS指控的自主水平也是一种逆反关系。
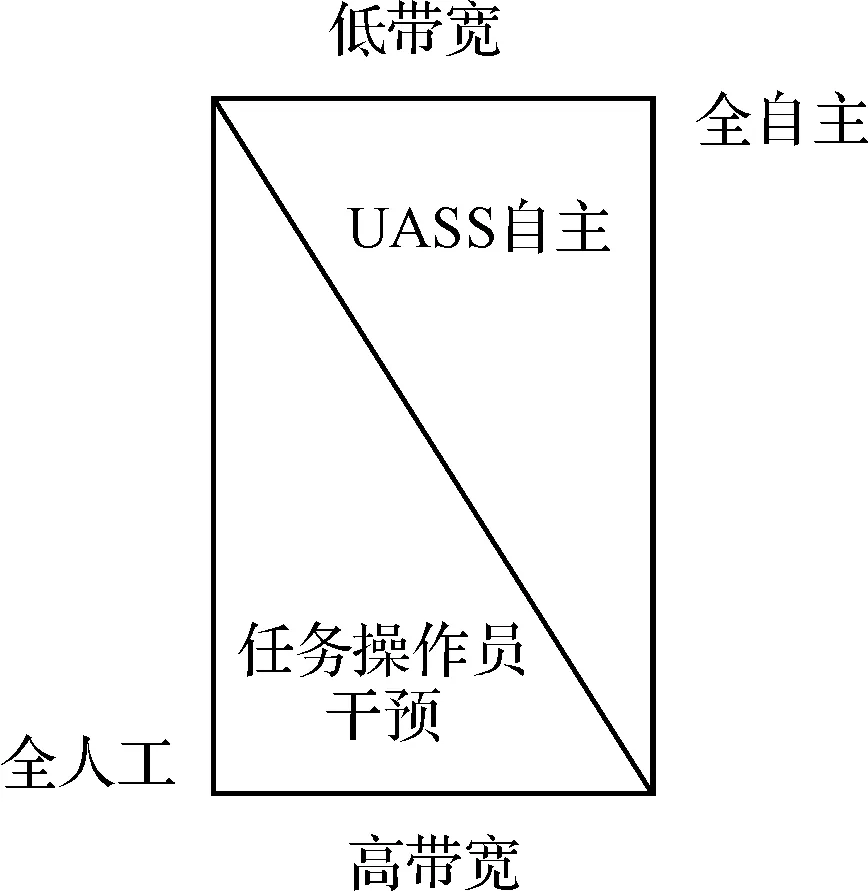
图3 UASS可变自主指控与通信带宽
5 结语
UASS具有UCS的一般性,也有其特殊性。本文针对UASS自主指控问题,探讨了其原理、实现方法和关键制约因素等。UASS分级可变自主指控结构,虽然基于UASS特殊的使命任务设计,但对于其它类型的UCS,同样具有借鉴意义。在UASS等UCS自主指控系统研究中,信息保障与系统本身的设计同样重要,UASS分级可变自主指控体系结构下不同的自主指控等级对于保障信息、通信带宽和通信方式的详细分析和论证是下一步研究的重点。
[1] 苏金涛.无人水下反潜作战平台指挥控制研究[J].指挥控制与仿真,2014,36(2):22-25.
[2] 牛轶峰,沈林成,戴斌,等.无人作战系统发展[J].国防科技,2009,30(5):1-11.
[3] Department of the Navy. The Navy Unmanned Undersea Vehicle(UUV) Master Plan. April,2004.
[4] 赵祖铭.潜艇指控系统技术和发展分析[J].指挥控制与仿真,2007,29(2):1-8.
[5] 李瑜,张文玉.无人作战平台指挥控制技术[J].指挥信息系统与技术,2011,12:6-9.
[6] T. B. Sheridan, W. L. Verplank. Human and Computer Control of Undersea Teleoperators[R]. MIT Man-machine Systems Laboratory, Cambridge,1978.
[7] R. Parasuraman, T. B. Sheridan, C. D. Wickens. A Model for Types and Levels of Human Interaction with Automation[J]. IEEE Transactions on Systems, Manand Cybernetics, Part A: Systems and Humans,2000,30(3):286-297.
[8] B. P. Zeigler. High Autonomy Systems: Concepts and Models[C]//Proceedings of AI Simulation and Planning in High Autonomy Systems,1990:2-7.
[9] H. M. Huang, K. Pavek, J. Albus, E. Messina. Autonomy Levels for Unmanned Systems(ALFUS) Framework: An Update[R]. 2005 SPIE Defense and Security Symposium, Orlando, Florida, USA,2005.
[10] 沈松,齐倩,沈斌.美军2030年无人系统:一体化指挥控制体系结构[M].沈阳:辽宁大学出版社,2013.
[11] Elyon A. M. DeKoven, Scott D Wood. Integrating Adjustable Autonomy in An Intelligent Control Framework[C]//Proc. SPIE 59860: 59860G,1-2.
Study on Autonomous Command and Control of Unmanned Anti Submarine System
ZHANG Qi1SU Jintao2
(1. Navy Armament Department, Beijing 100841)(2. Jiangsu Automation Research Institute, Lianyungang 222061)
It is a challenge to the command and control of Unmanned Anti Submarine System(UASS) which determines its actual combat capability. The autonomous command and control method which is hierarchical and adjustable is developed based on the autonomous command and control levels and the adjustable control framework. It makes the UASS momentarily evaluate its autonomous abilities and initiatively request assistance from humans which realizes man-machine intelligence integration, and no more adapts the actual combat demand of UASS in complex battlefield.
unmanned, anti-submarine, autonomous, command, control, hierarchical, adjustable
2015年1月5日,
2015年2月27日 作者简介:张起,男,工程师,研究方向:系统工程。苏金涛,男,高级工程师,研究方向:反潜技术,鱼雷防御技术。
E925
10.3969/j.issn1672-9730.2015.07.011
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
军民两用技术与产品(2021年10期)2021-03-16
现代防御技术(2020年1期)2020-05-08
意林(儿童绘本)(2020年3期)2020-04-03
中国外汇(2019年17期)2019-11-16
军事运筹与系统工程(2018年1期)2018-11-10
无人机(2017年10期)2017-07-06
现代防御技术(2016年1期)2016-06-01
小学生作文选刊·低年级版(2015年9期)2015-09-16
环球时报(2010-02-20)2010-02-20