
基于灰色预测滑模控制的鲁棒飞行控制器设计
2015-03-16 01:27焦鑫江驹孟宏鹏
飞行力学 2015年6期
焦鑫, 江驹, 孟宏鹏
(南京航空航天大学 自动化学院, 江苏 南京 210016)
基于灰色预测滑模控制的鲁棒飞行控制器设计
焦鑫, 江驹, 孟宏鹏
(南京航空航天大学 自动化学院, 江苏 南京 210016)
为了解决近空间可变翼飞行器大包络飞行以及小翼伸缩过程中受到不确定性参数和未知外部干扰的问题,第一次将灰色理论引入飞行控制领域。首先对飞行器的非线性模型不确定性参数进行分析,利用灰色GM(0,N)模型精确预测不确定性参数和外部干扰;然后根据所预测的数值,设计了基于灰色预测滑模控制的鲁棒飞行器,从而有效补偿不确定性参数和外部干扰对飞行器的影响。仿真结果表明,灰色GM(0,N)模型能够有效预测不确定性参数和未知外部干扰,并通过所设计的飞行控制器补偿其影响,保证了飞行器的稳定性和鲁棒性。
灰色预测; GM(0,N)模型; 近空间可变翼飞行器; 飞行控制器
0 引言
近空间可变翼飞行器具有强时变、非线性、强耦合以及不确定性等特点[1],尤其是模型参数的不确定性,使飞行控制难度增大。
针对以上问题,目前已有不少学者进行了较为深入的研究。具有鲁棒性的反馈线性化可以用来提供一种针对吸气式近空间可变翼飞行器在模型不确定和飞行条件不断变化情况下速度和高度跟踪的方法[2]。文献[3]将非线性闭环回路与自适应动态逆相结合,为吸气式近空间可变翼飞行器设计了一个非线性鲁棒自适应飞行控制器。文献[4-5]将终端滑模与二阶滑模控制相结合,设计了飞行控制器,用来解决近空间可变翼飞行器参数不确定问题。线性参数变化法也被用于近空间飞行器的飞行控制器设计[6]。虽然以上提到的这些方法都能在一定程度上克服参数不确定对近空间飞行器的影响,但这些方法都需要对非线性模型进行一定的简化,或者忽略一部分不确定性参数和外部干扰的影响,这些都会对工程实现带来较大的影响。
灰色预测针对不确定信息具有很好的预测效果,目前已广泛用于能源消耗、经济发展、社会变化以及行为趋势等方面[7-8],在越来越广泛的领域发挥其重要作用。近年来,灰色预测已经逐渐被用于控制工程领域[9-10]。
本文通过GM(0,N)模型来精确预测模型中不确定参数和外部干扰的数值,不论其大小。同时,对由于不确定参数和外部干扰对飞行器所造成的影响进行补偿,从而能够使飞行器精确跟踪理想指令信号,以保证飞行控制器的控制效果。
1 近空间可变翼飞行器模型
根据力和力矩平衡,可建立近空间可变翼飞行器纵向模型[11]:
(1)
(2)
(3)
(4)
(5)
(6)
参数不确定性主要体现在模型参数和气动参数的不确定。本文中,不确定参数作为外加变量加入正常变量中用于控制器设计。主要参数如下:
m=m0(1+Δm),Iy=Iy0(1+ΔIy),s=s0(1+Δs)

(7)
其中:
(8)
(9)
(10)
(11)
(12)
Lαcosγ-Dαsinγ]
(13)
式中:Dα=∂D/∂α,Lα=∂L/∂α,Cβ=∂CT/∂β。其他各参数的含义见文献[11]。
2 控制器设计
2.1 系统整体结构
近空间飞行器的模型参数具有不确定性,同时,飞行器在近空间中飞行,由于飞行环境复杂,会受到很多未知的外部干扰。本文将设计基于灰色预测滑模控制的近空间可变翼飞行器的鲁棒飞行控制器,系统结构框图如图1所示。
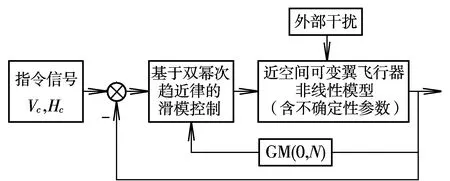
图1 系统结构框图Fig.1 The system structure digram
图1中,考虑到近空间可变翼飞行器的非线性模型中存在参数不确定性,所以只用滑模控制不能满足具有不确定性系统的控制需求。在只用滑模控制器的不稳定控制系统中,不确定参数和外部干扰值通过GM(0,N)模型进行预测[13],然后根据预测的数值,所设计的基于灰色预测滑模控制的鲁棒控制律将会补偿不确定性和外部干扰对飞行器的影响,从而使系统保持精确跟踪理想指令信号的性能。
2.2 基于双幂次趋近律的滑模控制
设跟踪误差为:eV(t)=V(t)-Vd(t),eH(t)=H(t)-Hd(t)。定义积分滑模面:
(14)
式中:λV,λH为正常数;积分项用于消除稳态误差。sV和sH对时间t的一阶导数为:

(15)
设计双幂次趋近律:

(16)
式中:kV1,kV2,kH1,kH2>0;αV>0,αH<1;βV,βH>1。
根据式(7)、式(15)和式(16)可以得到如下控制律:
(17)
2.3 模型不确定性分析
在近空间飞行器反馈线性化的模型式(7)中,参数b11,b12,b21,b22都是不确定的。因飞行器模型中参数是不确定的,这就意味着近空间可变翼飞行器的非线性模型是一个灰色系统,所以不能准确地算出近空间可变翼飞行器系统模型的具体数值。
(18)
进一步,因为飞行器所受外部干扰也是不确定的,测量误差是不可避免的,也就是说,式(7)的矩阵[fV,fH]T也是不确定的,记为[fV′,fH′]T。
(19)
所以,式(7)则相应地变为:
(20)
2.4 灰色GM(0,N)模型

(21)
(22)
⋮
(23)
为GM(0,N)模型[14]。
GM(0,N)模型不含导数,因此为静态模型。GM(0,N)的建模基础是原始 1-AGO序列。

2.5 控制器设计
当系统具有不确定和受到外部干扰时,传统的滑模控制律式(17)已不能保证近空间可变翼飞行器非线性系统的稳定性。为了补偿不确定部分对飞行器的影响,需要对不确定性参数和外部干扰值进行预测。根据式(7)、式(15)和式(20),相应的sV和sH的导数可以重新写为:
(24)
如果仍然使用未加处理的βc和δe控制信号时,展开式(20),可以得到:
(25)
下面通过灰色GM(0,N)模型来预测不确定性和外部干扰。
第一步:将式(25)离散化:
(26)
式中:t=kT,T为采样时间;x1=b11βc;x2=b12δe;x3=b21βc;x4=b22δe;X1=[x1,x2];X2=[x3,x4]。
第二步:分别建立x1,x2,x3,x4和D1,D2的原始离散序列:
(27)
式中:N=5。
第三步:建立x1,x2,x3,x4和D1,D2的1-AGO离散序列:
(28)
其中:
第四步:计算下式:
(29)
(30)
第五步:计算不确定性参数和外部干扰值:
根据式(25)可以得到:
(31)
(32)
不确定性参数和外部干扰可以通过下式所示的最小二乘方法计算出来:
(33)
(34)
第六步:设计基于灰色预测滑模控制的鲁棒控制律。
根据式(20),可以得到基于灰色预测的鲁棒控制器来补偿不确定性参数和外部干扰对近空间飞行器的影响。
(35)
3 仿真验证
为了更好地验证所述控制器的效果,本文将考虑不确定性参数和未知外部干扰影响同时存在的情况。

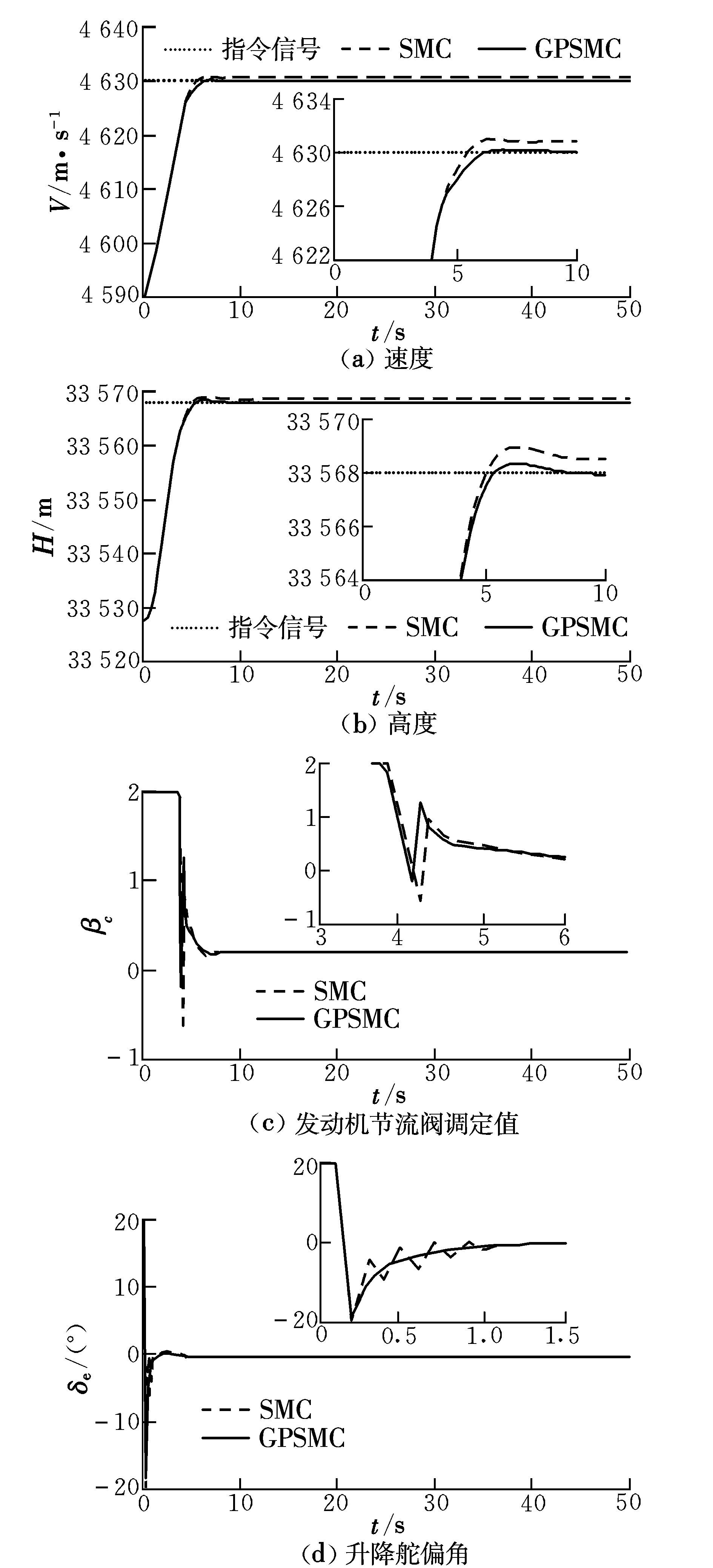
图2 系统控制效果Fig.2 Control effects of the system
图2中,GPSMC表示灰色预测滑模控制,SMC表示滑模控制。可以看出,滑模控制器存在一定的稳态误差,不能有效地控制系统;而基于灰色预测滑模控制的飞行控制器可以精确预测系统模型中所存在的不确定性参数的值,并完全进行补偿,使近空间可变翼飞行器能够精确跟踪指令信号,保证了系统的稳定性和鲁棒性。
4 结束语
本文将灰色理论应用于飞行控制领域,设计了基于灰色预测滑模控制的飞行控制器。通过灰色GM(0,N)模型将系统中的不确定性参数和未知外部干扰预测出来,再根据所预测出的值,设计鲁棒控制器。该控制器能使近空间可变翼飞行器精确跟踪指令信号,保证了系统的稳定性和鲁棒性。本文对研究近空间飞行器的飞控系统具有一定的理论价值和参考意义。为了增强实际应用价值,本课题将在后续研究中加入自适应控制的思想。
[1] 孙长银,穆朝絮,余瑶.近空间高超声速飞行器控制的几个科学问题研究[J].自动化学报,2013,39(11):1901-1913.
[2] Yurkovich S,Sigthorsson D O,Jankovsky P,et al.Robust linear output feedback control of an airbreathing hypersonic vehicle[J].Journal of Guidance,Control,and Dynamics,2008,31(4):1052-1066.
[3] Fiorentini L,Serrani A,Bolender M A,et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles [J].Journal of Guidance,Control,and Dynamics,2009,32(2):402-417.
[4] Zhang R,Sun C,Zhang J,et al.Second-order terminal sliding mode control for hypersonic vehicle in cruising flight with sliding mode disturbance observer[J].Journal of Control Theory and Appllication,2013,11(2):299-305.
[5] 宗群,苏芮,王婕,等.高超声速飞行器自适应高阶终端滑模控制[J].天津大学学报(自然科学与工程技术版),2014,47(11):1031-1037.
[6] 黄广.高超声速飞行器残差自调节高精度控制算法研究[D].哈尔滨:哈尔滨工业大学,2013.
[7] 刘思峰,谢乃明.灰色系统理论及其应用[M].北京:科学出版社,2008.
[8] 崔立志.灰色预测技术及其应用研究[D].南京:南京航空航天大学,2010.
[9] 祝华远,崔亚君,高峰娟.灰色预测模型在军机飞控系统故障预测中的应用[J].四川兵工学报,2014,35(6):44-46.
[10] Kayacan E,Ulutas B,Kaynak O.Grey system theory-based models in time series prediction [J].Expert Systems with Applications,2010,37(2):1784-1789.
[11] Sun H,Li S,Sun C.Finite time integral sliding mode control of hypersonic vehicles[J].Nonlinear Dynamics,2013,73(1/2):229-244.
[12] Xu H J,Mirmirani M D,Ioannou P A.Adaptive sliding mode control design for a hypersonic flight vehicle[J].Journal of Guidance,Control,and Dynamics,2004,27(5):829-838.
[13] Qiu G,Shentu N,Shi Z.Prediction method of cement strength based on GM-RBF neural network combination model [J].Science & Technology Review, 2014,32(3):56-61.
[14] Li S,Mei Q.Public-key coding system based on grey generation and braid group [J].Grey Systems:Theory and Application,2011,2(3):419-426.
(编辑:任亚超)
Design of flight controller based on grey-prediction sliding mode control
JIAO Xin, JIANG Ju, MENG Hong-peng
(College of Automation Engineering, NUAA, Nanjing 210016, China)
This paper proposed a novel scheme that applied grey theory in the field of flight control for the first time, considering the unavoidable uncertainties and external disturbances of near-space morphing aircraft flying in complex aerospace environment. After analyzing the uncertainties existing in the nonlinear model of near-space morphing aircraft, GM(0,N) was drawn upon to accurately forecast the parameter uncertainties and external disturbances. In terms of the values of prediction, the robust controller based on grey prediction was designed to compensate the influences caused by uncertainties and disturbances. Simulation results indicate that GM(0,N) is effective to predict the uncertainties and external disturbances which can be completely compensated by the proposed robust controller to gurantee the stability and robustness of the near-space morphing aircraft.
grey prediction; GM(0,N) model; near-space morphing aircraft; flight controller
2015-04-21;
2015-08-17;
时间:2015-09-25 16:10
江苏省普通高校研究生科研创新基金资助(CXZZ13_0170);校博士学位论文创新与创优基金资助(BCXJ13-06);中央高校基本业务费专项基金资助
焦鑫(1986-),女,山西永济人,博士研究生,研究方向为先进飞行控制技术; 江驹(1963-),男,江苏扬州人,教授,博士,研究方向为导航、制导与控制; 孟宏鹏(1989-),男,河南郑州人,硕士研究生,研究方向为系统工程。
V249.1
A
1002-0853(2015)06-0542-05
猜你喜欢
法律方法(2022年2期)2022-10-20
凤凰动漫(军事大王)(2022年1期)2022-04-19
中国外汇(2019年7期)2019-07-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2018年2期)2018-04-18
系统工程与电子技术(2016年4期)2016-08-24
小朋友·快乐手工(2015年5期)2015-06-06
华东理工大学学报(自然科学版)(2014年6期)2014-02-27
