
导弹红外热源测试挂架机构设计和研究
2015-03-21 08:53曹成铭邱亚峰
红外技术 2015年9期
曹成铭,邱亚峰
导弹红外热源测试挂架机构设计和研究
曹成铭,邱亚峰
(南京理工大学 机械工程学院,江苏 南京,210094)
以一种导弹红外热源测试挂架为研究对象,利用Proe建立了实体机构模型并利用ANSYS分析了机构的可靠性,首先介绍了挂架机构运动的原理和结构组成,然后利用workbench对机构进行了冲击响应的分析,最后通过软件仿真动态特性并与解析解相比较拟合出满足精度要求的运动函数。
红外热源;测试挂架;结构设计;冲击分析;运动仿真
0 引言
导弹是现代国防科技的重要组成部分,空空导弹是导弹家族中的重要分支。空空导弹性能的测试和验证在导弹研制过程中占有重要地位。追踪红外热源还是目前大部分空空导弹捕捉目标的手段。红外热源测试就是测试在导弹接收到红外热源信号后,其内部的传感器工作运行情况。导弹测试挂架就是在导弹做测试时悬挂导弹的机构。目前国内大多数导弹测试时是固定挂载,这样的挂架是固定的,设计简单,受力不变[1-3]。但是为了更真实地模拟导弹在空中飞行姿态下的测试,需要设计能够改变导弹姿态的测试挂架。其中有一种工况就是让导弹在水平方向可以绕弹轴线旋转90°。相比固定挂架,设计动态挂架需要分析挂架受力的多种因素,验证挂架强度及冲击强度与屈服应力的危险位置,并进行设计优化以满足性能指标参数。
1 机构设计原理
1.1 技术指标
1)要求导弹在水平方向绕弹轴线0°~90°连续可调,如图1所示,可以绕轴转动角度,=0°~90°,可定位锁死;2)位置精度为0.5°;3)挂架水平偏转机构负载250kg后部冲击10;4)挂架水平偏转机构变形量为2cm以下;5)除挂架与导弹连接,不得有其它装置与导弹相连。挂架为实验室原有设备,挂架和导弹通过几何约束固定可以视为一个整体。
图1 挂弹架和导弹链接示意图
1.2 设计原理
其原理就是曲柄滑块机构如图2,该机构为平面机构,滑块1只能水平方向运动,滑块2只能在弧形轨道里滑动,导弹与B杆固定。动力源推动滑块1带动A杆从而带动滑块2在圆形轨道里运动从而使B杆做绕铰点C(即导弹横截面圆心)做转动[4-5]。

图2 机构运动原理图
2 结构设计
因为导弹较长,为了保证导弹转动时的平衡,采用两套曲柄滑块机构推动,如图3,前后两套机构分别设置在导弹的1/3和2/3处。前后两套机构除了方位不同,组成结构和运动原理都相同。如果使用两个动力源推动可能会产生不同步现象,产生较大的扭矩,出现扭转破坏[6]。所以采用一个丝杠推动,利用横杆将力转化到两个机构。丝杠和横杆是通过螺纹相连,横杆端头和A杆件上端通过销连接,并通过轴承卡在水平轨道里。A杆件下端和B杆件上端通过销连接通过轴承卡在弧形轨道里,杆件B和连接耳C以及导弹挂架都是用过螺栓固定,可视为一个整体。杆件E和轨道板固定,下端通过轴承卡在C上的弧形轨道。
从图4可以看出在0°(图(a))和90°(图(b))两个极限位置各个零件的位置。
3 瞬态冲击载荷测试
3.1 半正弦冲击响应计算方法
在导弹测试的过程中会在导弹的尾端给其一个推力模拟飞行时的发动机推力,相当于给导弹一个瞬时的冲击,这个冲击载荷会通过导弹作用到水平偏转机构上。冲击对机构有一个应力、应变的累积,所以冲击对机构的破坏更大,相对于这个冲击是一个半正弦加速度激励,最大的加速度在30,持续时间0.1s。在持续时间为的半正弦脉冲加速度、初始速度为0的条件下,理论公式如下:
1.轨道板 2.连接耳C 3.连接杆件E 4.曲柄杆件B 5.摇杆杆件A 6.推力横梁 7.丝杠 8.挂弹架 9.导弹
(a)
(b)
图4 机构不同工况位置示意图
Fig.4 Location of the parts of different work conditions
加速度公式[7]:

对加速度公式进行积分,得速度公式:
3.2 有限元仿真计算
在导入计算前必须将模型进行简化,将一些倒角、台阶和圆孔去掉,可以提高网格划分的质量和效率。将整体模型导入workbench,导入后每个零件都是相对独立,需要利用布尔运算对实体进行整合,重新定义接触面。设置各个实体的材料属性,各材料属性见表1。

表1 材料属性
由于该机构形状比较规则,可以利用实体单元划分单元网格,网格划分结果如图5所示。定义边界条件:将上部轨道板设置为固定面,在导弹的后部加载半正弦的冲击,利用采样的方式在函数图像上采集时间和对应的力,输入workbench,计算求解[8-9]。
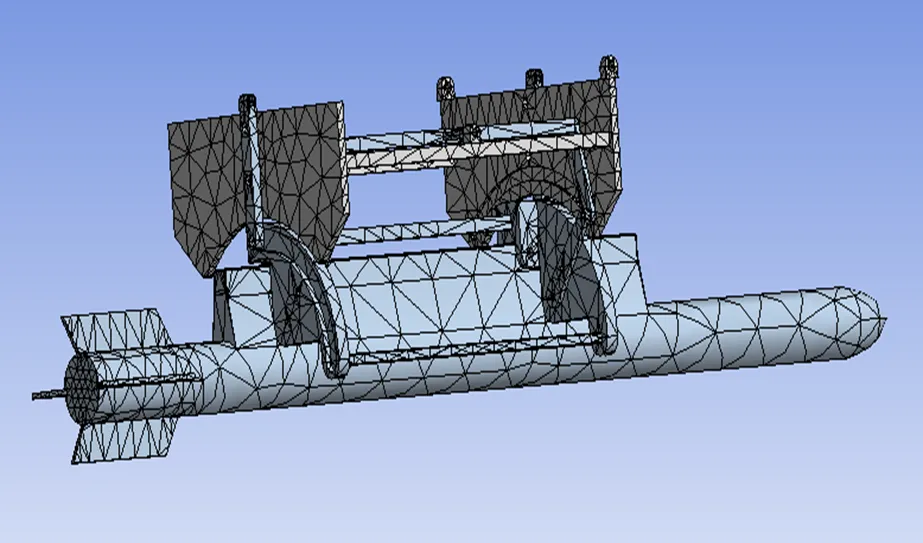
图5 整体网格划分图
图6为仿真计算结果的等效应变云图,从分析结果可以看出挂架的最大应变出现在图6的标记位置,为1.04mm(不包括导弹的形变)。图7为等效应力云图,从图中可以看出:最大应力为87MPa,小于屈服强度355MPa,符合使用要求。
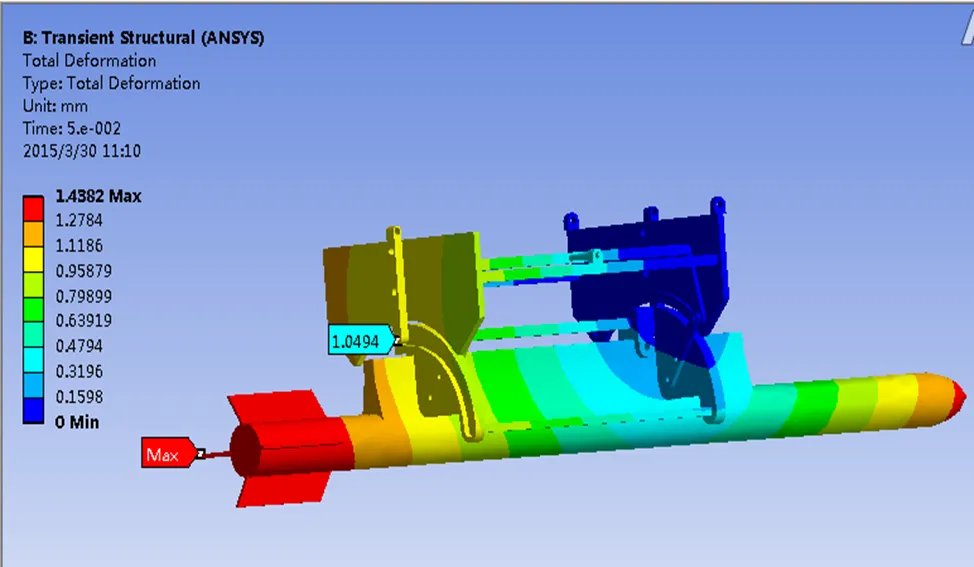
图6 等效应变云图
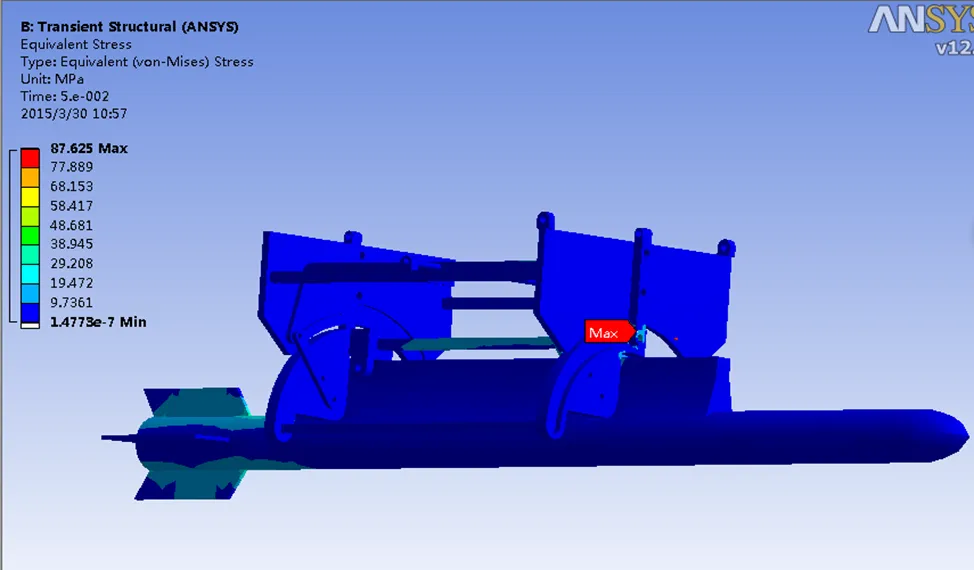
图7 等效应力云图
4 误差分析
4.1 设计误差分析
误差的来源有两个,一个是设计误差,另一个是变形误差。对于运动机构来说,弄清楚各个部件之间的运动关系可以使控制更加精确。曲柄滑块机构的各个杆件的速度由杆件长度和相对位置决定,没有统一的运动函数来表达其运动。可以利用workbench里面的Rigid Dynamics Analysis模块进行求解。也可以利用解析法计算。
4.2 workbench运动模拟
由于Rigid Dynamics只是对运动关系的求解,所以不需要将整个模型导入,只需给出等比例的运动简图。虽然滑块是源动件,但是其运动情况不知道。所以设曲柄2的角速度为已知量,角速度大小为0.31416rad/s。将计算数据导出绘成折线图,如图8所示。
图8(a)显示的是滑块的位移与时间的关系(初始位置的位移为0)。图8(b)显示的是滑块的速度和时间的关系。角速度设置为18°/s。5s时间正好运动90°,只取这一段时间的数据即可。位移和速度曲线相对比较平滑,说明该机构的运动特性优良,没有较大的冲击[10]。
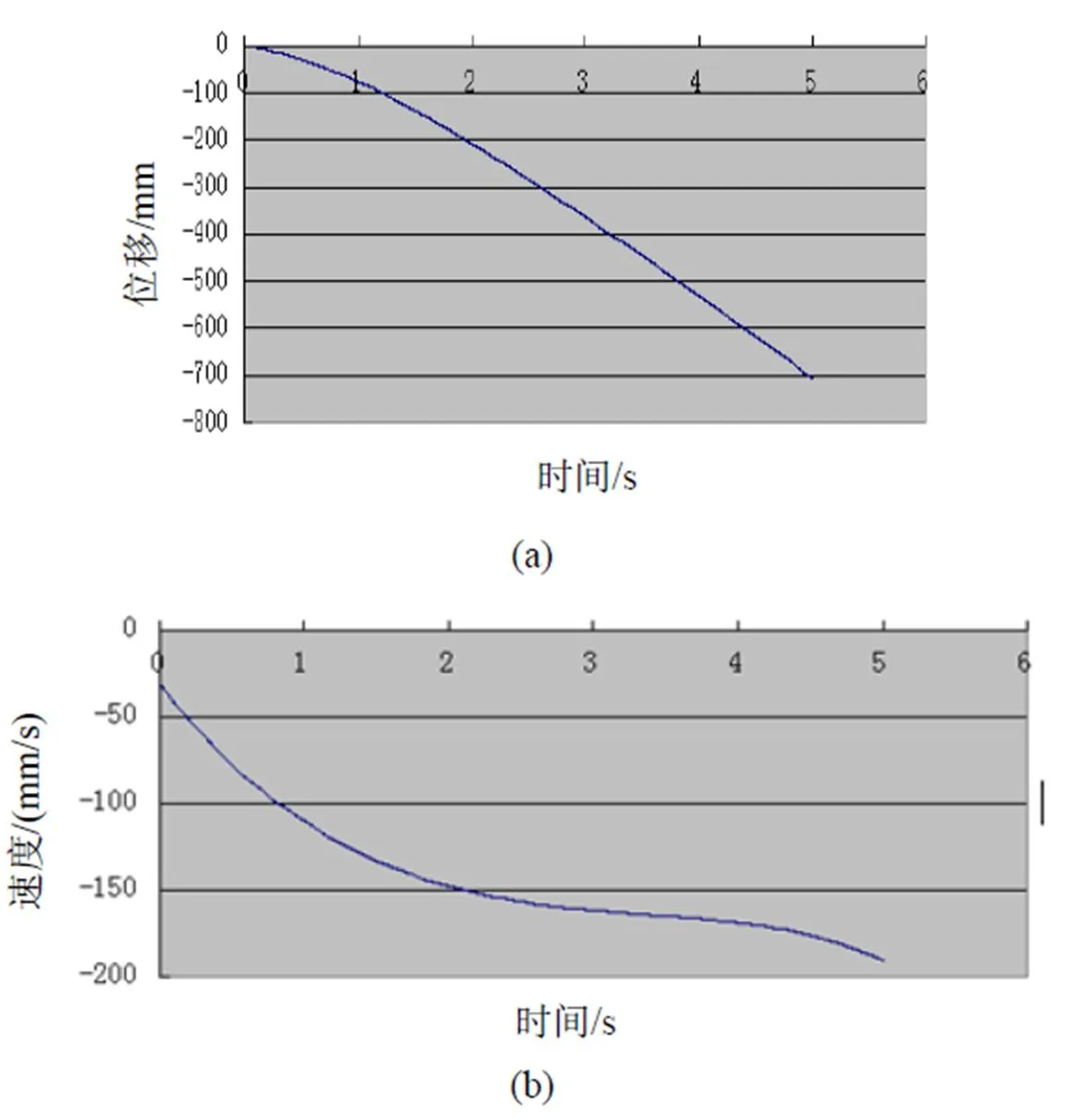
图8 数据处理折线图
4.3 解析法计算运动特性
图9为机构运动简图,如图所示滑块只能沿水平方向运动,D3就是其位移:
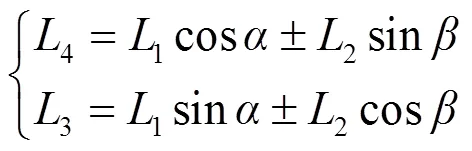
式中:L4为滑块距转轴的偏心距离矢量,设计值617mm;L1为曲柄长度,设计值为500mm;L2为摇杆长度,设计值为450mm;L3为滑块距转轴的水平距离矢量。
由式(3)可以看出当(-45°≤≤45°)确定以后,根据具体位置关系和3的长度就可以确定。根据精度要求0.5°,对每隔0.5°取值,计算出3的值减去原来的3的值就是曲柄转过0.5°,滑块的位移。这样一共可以采到180个点。机构的精度主要和滑块的位移有关,位移与时间的关系如图10所示,通过Matlab拟合出一个位移函数。
滑块速度拟合函数为:=3.81-25.122-64.63
可以看出拟合的函数和workbench计算出的位移-时间曲线拟合度非常高,误差控制在0.5mm内,故该函数可以很好地为下一步电机控制提供参考。每隔0.5°取值,通过拟合分析,满足挂架转动精度0.5°的指标要求。
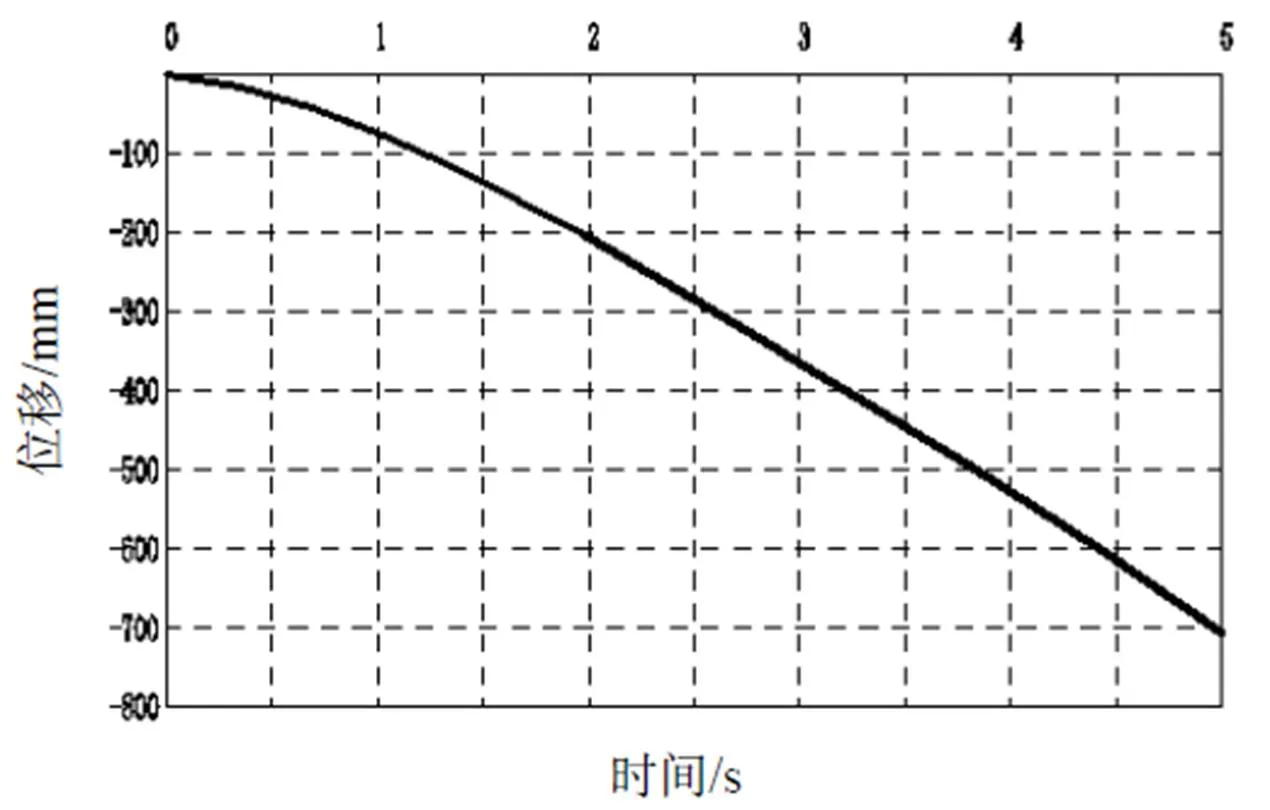
图10 拟合函数曲线
4.4 变形误差分析
机械结构受力较大时,自身会有一定的变形,该变形也会导致误差。该机构的主要受力是导弹的重力和后部冲击。后部冲击是瞬间的,只要提供足够的强度,对精度误差影响不大。其主要变形误差来自导弹重力导致的变形。在转过90°以后,导弹的重力全部转化成对连接耳的剪切力,剪切力对构件的变形影响最大,因此对连接耳做受力分析。利用workbench中的Static Structural模块进行仿真计算[11]。
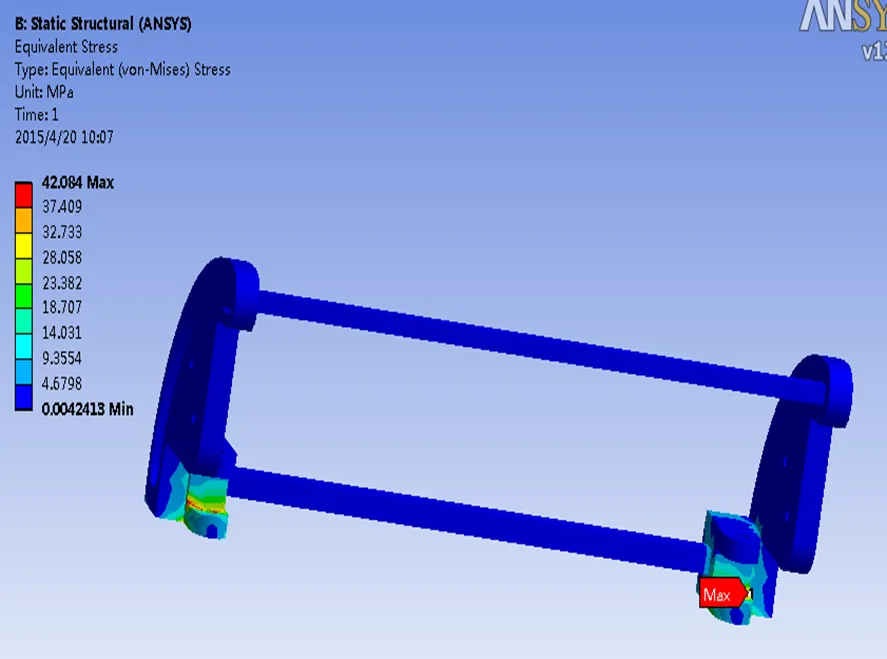
连接耳的结构和受到的剪切力如图11所示。导弹的重力为3000N,取安全系数1.6。总共加载5000N的力,两个连接耳各2500N,面1设置为固定面,进行受力分析,可以得到等效应力图。
从图12(a)可以看出最大应变为0.6mm出现在链接耳端部位置。从图12(b)最大应力为42MPa,出现在链接耳根部。连接耳距离弹轴线250mm,变形在2mm以内即可满足精度要求。最大应力42MPa,小于钢的许用应力355MPa,满足强度要求。
5 结果分析
在计算冲击载荷的过程中,加载的冲击的最大值为5000N,是实际所受冲击的2倍,产生的最大应力为87MPa,小于钢的许用应力355MPa,最大变形为1.4mm,0.5°的精度对应的许用变形为2mm,满足精度要求。在静力分析的过程中,挂架主要受到导弹的重力,为300kg,仿真过程中加载的静载荷为5000N,是导弹重量的1.6倍,产生变形0.6mm,在精度范围内,最大应力为42MPa,小于钢的许用应力355MPa。在计算过程中所有的螺栓连接都做了刚化处理,在实际情况中这些节点的受力更加复杂,这是强度仿真分析的不足之处。
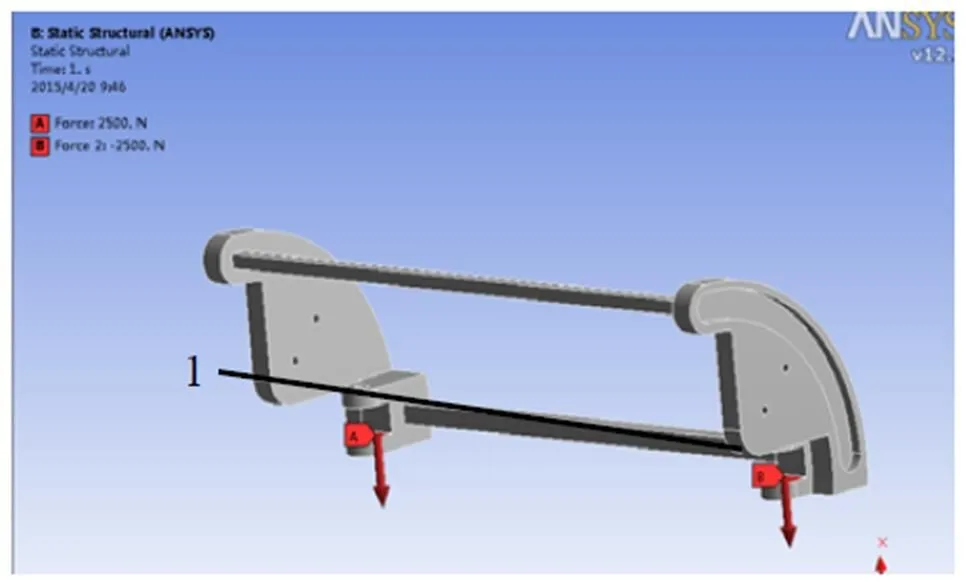
图11 有限元分析模型
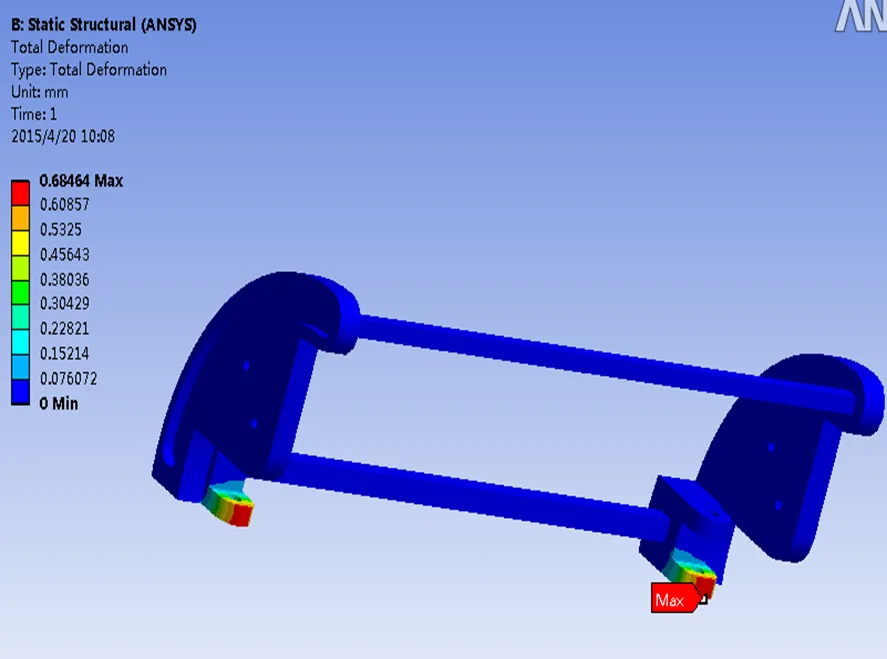
(a)
(b)
图12 有限元计算结果
Fig.12 The calculation results
运动仿真分析是以机构设备没有安装误差为前提的。在实际加工和安装过程中定位肯定有误差,通过图解法得出:导弹轴线距设计轴线相差2mm,旋转角度误差达到0.3°,如果安装误差到达4mm,机构就无法满足0.5°的精度要求。没有考虑安装误差是运动仿真的不足之处。
与原有的导弹挂架相比,本设计实现了实验室内导弹空中多姿态的功能,通过对关键部位进行结构加强,提高挂架承载能力、可靠性和运动精度:连接耳的厚度增加50%,承载能力提高了约50%,增加了可靠性。原有的导弹挂架是两套分布在两个独立龙门架上的固定结构,在冲击载荷下,整体刚度和变形量不一致,降低了挂架的可靠性,本设计采用整体框架式连接,通过静力学仿真分析,提高机构受力均匀性、整体协调性。
6 结论
本文通过三维模型建立,运动原理的分析,动态模拟确定该设计的水平偏转机构可以实现导弹绕轴心旋转90°的运动功能,具备自锁和可连续调节的功能。在瞬态冲击载荷的作用下应变小于给出的最大形变2mm的指标要求,可以满足设计要求。给出了机构运动特性函数,分析了机构误差特性,满足设计指标对导弹挂架的精度要求。
[1] 袁名松, 冯建伟, 黄云, 等. 巡飞攻击导弹红外成像导引头瞬态冲击响应分析[J]. 红外技术, 2014, 36(12): 953-957.
[2] 花文涛, 贾晓洪, 丁海山. 基于粒子群算法的导引头稳定平台控制参数设计[J]. 红外技术, 2013, 35(8): 507-511.
[3] 黄忠魁, 曲波, 余盛强, 等. 某自行炮用惯性导航单元防冲击研究[J].战术导弹控制技术, 2012, 29(4): 39-42.
[4] 杨元山, 郭文平. 机械原理[M]. 武汉: 华中理工大学出版社, 1989.
[5] 高耀东, 宿福存. ANSYS Workbench机械工程应用精华30例[M]. 北京: 电子工业出版社, 2013.
[6] 王新敏. ANSYS工程结构数值分析[M]. 北京: 人民交通出版社, 2007.
[7] 郑文纬, 吴克坚. 机械原理[M]. 北京: 高等教育出版社, 1997.
[8] 李范春. ANSYS Workbench设计建模与虚拟仿真[M]. 北京: 电子工业出版社, 2011.
[9] 黄志新, 刘成柱. ANSYS Workbench14.0超级学习手册[M]. 北京: 人民邮电出版社, 2013.
[10] 任学平, 高耀东. 弹性力学基础及有限单元法[M]. 武汉: 华中科技大学出版社, 2007.
[11] 李鹏飞, 徐敏义. 精通CFD工程仿真与案例实战[M]. 北京: 人民邮电出版社, 2011.
Design and Research of Missile Infrared Heat Source Test Hanging Rack Mechanism
CAO Cheng-ming,QIU Ya-feng
(,,210094,)
A missile infrared heat source test hanging rack mechanism was taken as the research object. The entities model was established based on Proe and the reliability of the institutions was analyzed. First the principle and structure of the hanging rack mechanism was introduced, thenthe mechanism’s impact response analysis was figured out by workbench. At last dynamic of the movement was simulated by the software and compared with the solutions of the mathematics to find a function of the movement. The results show that the strength of the institutions has met the requirement of movement and precision.
infrared heat source,test hanging rack mechanism,structure design,impact response,motion simulation
TH702
A
1001-8891(2015)09-0719-05
2015-04-21;
2015-05-25.
曹成铭(1990-),男,江苏无锡人,硕士研究生,研究方向:光机电系统结构设计。
猜你喜欢
四川建筑(2021年1期)2021-03-31
建筑机械化(2020年7期)2020-08-15
婚姻与家庭·性情读本(2017年1期)2017-02-16
科技创新与品牌(2016年8期)2016-09-29
工程建设与设计(2016年1期)2016-02-27
中国塑料(2015年9期)2015-10-14
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
河南科技(2015年2期)2015-02-27
