激光三维成像体制综述
2015-03-23 06:07陈念江
激光与红外 2015年10期
陈念江
(固体激光技术重点实验室,北京100015)
1 引言
激光成像雷达在目标的识别、分类和精确瞄准等方面有着明显的技术优势。与被动光电设备相比,它具有可以获取目标精确三维图像而不是二维图像的特点,并且不受光照条件和目标背景反差特性的影响。与毫米波雷达相比,它具有分辨率高、抗干扰性好、不受地面杂波影响等优势,因此发达国家都投入了大量人力物力对激光成像技术进行了研究,已经研制和开发出大量不同技术体制的激光三维成像系统,例如有扫描型激光三维成像雷达、基于阵列探测器的激光三维成像雷达、基于偏振调制的激光三维成像雷达、基于强度调制的激光三维成像、基于调频连续波的激光三维成像雷达和基于距离选通切片的激光三维成像雷达等,不同体制的激光三维成像雷达在系统构成和工作原理等方面都不相同,本文将对这些激光成像技术的原理、特点、研究状况和发展趋势进行回顾、总结和介绍。
2 扫描型激光三维成像技术
这种方式的激光三维成像系统基本上是一种窄视场激光测距机配以灵活的光束指向控制器。它一次可测量目标上一个点的距离,通过扫描装置,使扫描范围覆盖目标的所有待测部位,就可得到目标上各点的距离,将这些距离数据以适当的顺序进行采集、存储和显示,就可得到目标的距离图像。如果探测接收单元同时可测量激光脉冲回波的强弱,则还可以获取目标的强度(灰度级)图像。此类激光三维成像系统中,由于一个激光脉冲能量只用于测量一个点的距离,激光发散角和接收机视场都很小,激光能量集中,背景噪声小,因此它有比别的类型的激光成像雷达远得多的作用距离,但它必须具有很高的发射频率。发射频率应该等于图像的像元数乘以图像的帧频。即使对中等图像尺寸和帧频,所需要的激光发射频率也需要至少几十千赫。为了采集所有像元的数据,需要很快的光学扫描速度,很高的瞄准精度和稳定度。如果平台和目标之间存在相对运动,就要有加强型算法正确地记录和存储像元数据。
扫描型激光三维成像技术已相当成熟,已广泛应用于工程建设、要地监视、生产建模、汽车导航等领域,尤其是在测绘领域,扫描激光成像雷达已经发展成为遥感数据采集的一项先进前沿技术,它与全球定位系统(GPS)和惯性测量单元(IMU)相结合,在数字高程模型的获取、数字城市的建设、沿海地带的测绘和林业资源勘察等方面发挥了重要的作用。机载扫描激光三维成像雷达的工作示意图如图1所示。
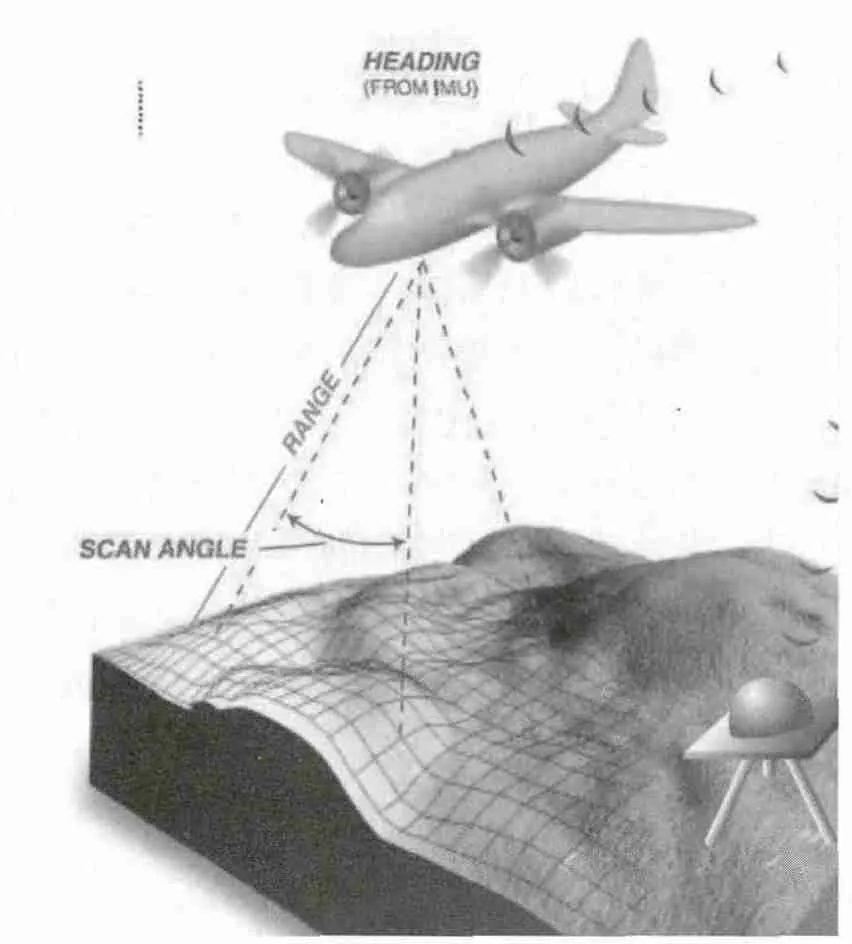
图1 机载扫描激光成像系统工作示意图Fig.1 Airborne scanning laser imaging system
在扫描激光成像雷达中,关键技术有:高重频、大能量激光发射器,为提高测距精度,超窄脉冲激光器是一个不错的选择;高可靠、高精度光束扫描器;数据点云的处理技术等。目前仍在发展中的单元技术有多目标测量技术(例如用于森林勘测时,可同时测量树冠和地面的多个回波)、数字化波矢量(全波形技术)和“多脉冲在空中”技术(MPIA,允许前一个回波回来前发射后一个激光脉冲,消除了测量距离对发射频率的限制)。从系统角度看,发射系统从单光束向多光束发射方向发展,接收系统从能量接收向单光子探测方向发展[1]。
对于机载和航天等远距离应用场景,目前看来其他激光成像方式很难替代扫描激光成像技术。机载扫描激光成像雷达已有许多定型商品,较著名的生产厂家有美国的Leica、加拿大的Optech等公司和德国的IGI等数十家公司。
3 基于盖革模式雪崩三维探测器阵列的成像技术
盖革模式的雪崩管(APD)阵列探测信号时工作于击穿电压以上,具有极高的倍增增益,单个光子即可触发足够幅度的电信号供后级电路进行处理。三维盖革APD阵列的每个像素都集成了距离计数器,工作时用激光器照射整个感兴趣的目标,同时开启计数器工作,目标上反射回来的激光回波返回到APD阵列的光敏像元,触发出电脉冲信号关闭计数器,从计数器的数据就可得到目标各点的距离。由于盖革APD阵列具有很多的暗电流脉冲和背景噪声脉冲,单次测量过程是难以区分信号脉冲和噪声脉冲的,因此盖革模式APD阵列都工作于高重频小能量激光发射方式,将时间(亦即距离)分成多个时间片(Time Bin),经过成百上千的多次测量,统计脉冲落入每个时间片的概率,噪声脉冲是随机分布的,而信号脉冲总落入对应的时间片,通过统计计算就可得到真实的目标距离。
盖革模式APD阵列工作于高重频低能量发射方式,通常单脉冲能量足够低,以致用1.064 μm的激光发射波长,都能做到人眼安全。盖革模式APD的主要优点是接收电路简单,探测器输出的直接是数字信号,易于计数器电路的处理,也不需要宽带模拟处理电路。
盖革模式APD阵列探测方式的一个缺点是每个雪崩脉冲产生之后有一个死区时间,在死区时间内,探测器无法在响应到来的光子,像元之间的串扰和暗电流计数也是盖革APD不利的因素,还有一个问题是单次测量无法得到目标的强度(灰度级)图像,因为返回来的1个光子和100个光子所产生的脉冲几乎是一样的。这也是基于盖革模式APD阵列的激光成像相机必须工作于高重复频率的原因。在这种相机中,不需要单个激光脉冲拥有高的激光能量,对每次发射,只需要低的探测概率,经过对多次测量数据的统计计算,和距离的算法相似,目标的强度图像也可以从多脉冲回波数据中统计出来。
盖革模式激光成像技术的先驱是MIT/LL,它们已制造出64×256阵列探测器和整机[2]。它研制的探测器的响应波长最初是在可见光波段,其隐蔽性不佳而且对人眼的危险性较大,最近Princeton Light-wave 和 Boeing SpectraLab 已有1.064 μm 和1.55 μm商品提供,目前都在开发32×128阵列探测器和整机。图2是MIT/LL的探测器和整机的实物图。

图2 MIT/LL的APD阵列和三维相机Fig.2 APD array and 3D camera of MIT/LL
此类激光三维成像雷达的关键技术是目标的搜索方式和数据处理算法,因为盖革模式的探测器阵列不能长时间工作于盖革状态,一般都工作在波门控制模式,在微秒级的波门内,探测器工作于盖革模式,工作电压高于雪崩电压,在波门之外,工作电压低于雪崩电压,因此开始工作时,要对目标进行搜索,波门的移动和目标的判断是一个关键过程,另外其距离和强度图像是基于多帧数据的直方图统计而获得,统计算法也是一项关键技术。其多帧数据处理而得到一幅三维图像的工作模式使其更适用于静止或低速运动的目标。
盖革模式探测器及相机的发展趋势是:更大的阵列规模,每个像素有多目标测距能力;将微透镜阵列与探测器像元集成,以便加大填充因子,充分利用激光能量,进一步提高探测距离。
4 基于线性模式APD阵列的激光三维成像
线性模式APD探测器阵列工作偏压处于雪崩电压之下,灵敏度低于盖革模式APD阵列,但其整机的工作原理与盖革模式激光成像雷达的工作原理相似,都是利用激光照明目标整个场景,目标发射回波聚焦在APD阵列的各个像元上,光电变换并放大后的脉冲电压送数据处理电路提取距离信息从而得到目标的三维图像。数据处理电路可有多种形式,可以采用距离计数器,也可以采用高速A/D采样,还可采用激光器主波开启恒流源充电,目标反射回波停止充电的时间幅度变换(TAC)等方案进行距离测量。
处于线性模式工作时,每个像素的电信号幅度与探测到的光信号强弱成正比[3],因此单个脉冲便可得到目标的强度(灰度级)图像和距离图像,其发射的激光工作于低重频能量状态,一般发射频率为20~30 Hz,发射能量在数十毫焦。其优点是算法简单,缺点是硬件读出电路复杂,作用距离较近。
从整机研制和使用的情况看,此类激光三维成像具有使用方便,成像速率高等优点,可对低速和高速运动目标进行快速成像,主要难点在于探测器阵列的研制。另外,由于探测器的读出电路复杂,因此探测器的像元间距一般都很大,在百微米以上,若用一束激光照明整个目标,反射回来的激光将有大部分聚焦在光敏面之外,造成激光能量的浪费,所以使用时常将激光发射光束用衍射光学元件(DOE)分成多数激光子束,每一子束返回后对应于探测器阵列的一个像元上,这对整机的研制是一个挑战。
美国ASC公司是线性APD阵列和整机的研制先锋,它已推出1.57 μm 的128×128 APD阵列和整机。所使用的激光脉冲宽度为2 ns,距离分辨率为20~30 cm,相机作用距离达到1 km以上。雷声和DRS公司也长期致力于线性APD阵列的研究,在灵敏度上取得了很大进展,已接近单光子探测灵敏度的水平。
5 基于偏振调制的激光三维成像技术
众所周知,纯粹的连续波不携带时间信息,不能探测距离从而不可能获取目标的三维图像,但通过对连续波某个物理量(幅度、频率、偏振等)进行随时间变化的调制,就能将调制后的连续波与时间关联起来,从而实现测距功能。美国空军开展的LIMARS项目就是研究利用普克尔盒对偏振方向进行旋转调制,然后比较反射波在两个相互垂直的方向上的偏振信号差异实现三维成像功能。其组成示意图如图3上部所示,图3中下部的锯齿波是加在Pockels盒的调制电压。
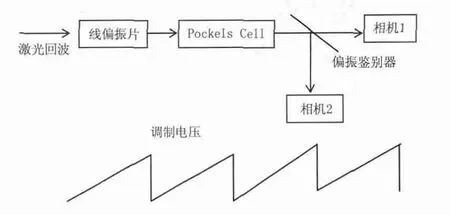
图3 偏振调制激光三维成像系统Fig.3 Polarization modulation laser 3D imaging system
线偏振片用于滤除回波中的退偏光,锯齿波加在Pockels盒上,用于随时间旋转它的偏振方向。相机前的偏振鉴别器用于分离两个相互垂直偏振方向的回波激光。当回波信号进入接收机后,回波的退偏部分被滤除,一个锯型波被加在Pockels盒上,调制它的偏振态,使之成为时间的函数,激光通过Pockels盒后,线偏激光回波被分成两个方向并进入两个相机,用两个相机分别记录两个偏振方向信号的比值。假设以锯行波起点为开始,不同时间回来的回波其两个偏振方向的分量是不同的,因此不同距离上的回波与两个相机的信号比值有一一对应的关系,从两个相机对应像素的信号比值就可得到目标一点的距离[4]。由于相机采用阵列探测器,因此对相机各点的信号进行上述处理,单个激光脉冲便可得到目标的距离图像。
锯齿波越陡,得到的距离分辨率就越高。该方案的好处就是可以用两个普通相机获得高距离分辨率的图像,缺点是需要利用Pockels盒进行旋转调制。通常Pockels盒需要很高的调制电压。除了利用锯齿波进行调制外,还可利用其他调制波形。相机可选高分辨率相机,例如640×512,现在即使在1.5 μm的近红外波段,甚至可以使用1280×1024的相机。
该方案获得了多项专利,Tetravue公司已研制出原理样机。
6 强度调制激光三维成像技术
该方案首先由美国Sandia国家实验室提出,它是对激光强度进行调制。对每一个像素而言,它近似与相位测距技术,其组成和原理如图4所示。
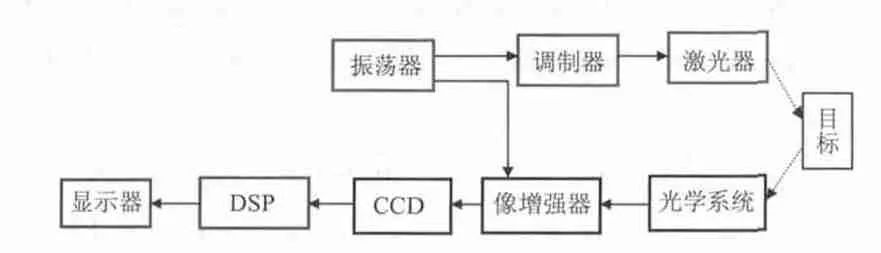
图4 强度调制激光三维成像系统Fig.4 Intensity modulation laser 3D imaging system
激光发射器发射一束强度经过调制的激光束射向目标(通常采用正弦调制),该激光束经目标反射后,由接收机的激光探测器进行接收。由于反射波是由反射波经过两倍的目标距离之后到达探测器的,因此反射波与发射波相比将有一个时间延迟,该时间延迟t为:
时间延迟t反映到信号上就会产生一个反射波与发射波的相位差Δθ:

式中,c是光速;f是激光的调制频率。目标的距离越远,相位差越大,距离越近,相位差越小,因此从相位差可以反演出目标的距离。
此类激光成像雷达的关键技术有:平顶激光均匀照明;像增强器的高速调制;距离信息的反演技术等。
该体制的激光三维成像技术发展出许多改进形式,为了调制像增强器和激光器的方便,研究了用方波进行调制的方案和算法;为了提高作用距离,研究了采用脉冲固体激光器作为发射机,对像增强器进行锯齿波调制的方案。这些体制的原理样机都得到了实现和验证。
Sandia实验室以此技术为基础,开发出了用于水下目标探测和航天器结构监测用的原理样机。
7 基于调频连续波(FMCW)的激光三维成像技术
美国陆军实验室将FMCW的原理应用到激光三维成像雷达中,验证了方案的可靠性,实现了数公里,分米精度的目标探测。其结构组成和原理如图5所示。
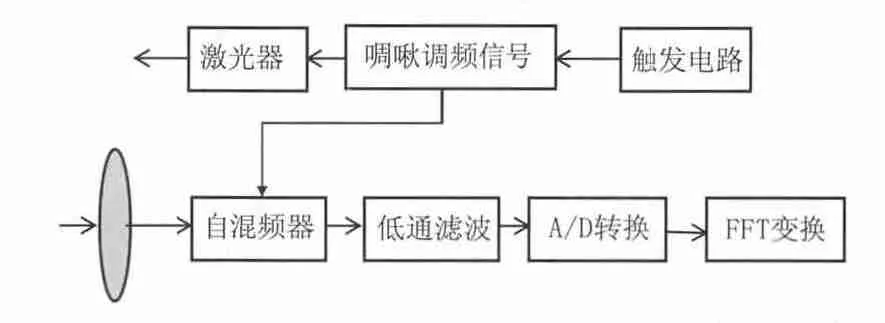
图5 FMCW激光三维成像系统组成图Fig.5 FMCW laser 3D imaging system schematic diagram
该方案利用射频副载波信号对激光功率进行频率调制,调制后的激光信号射向目标,同时调频信号作为本振信号也加在MSM上,目标返回的光信号经光学系统汇聚后照射在自混频探测器MSM上,两个信号进行光电变换和混频,由于信号是随时间进行线性调频的,因此激光发射信号的频率和经过一段时间返回的信号频率存在一个频率差,目标越远,所用时间越长,混频后的频率差就越大,即目标距离和频率差成正比,通过测量频率差信号就可求得目标的距离,由于自混频探测器是多元面阵探测器,因此单次测量便可得到目标的三维图像。图中低通滤波器是滤除高频信号,保留差频信号,该信号经A/D数字化后送处理器进行快速傅里叶变换,求出各像素对应的距离。
可以推得目标的距离为:
式中,c是光速;T是频率调制周期;fif是测量到的差频信号;B是频率调制带宽[5]。
当目标存在相对运动时,会产生多普勒频移,即差频信号既包含目标距离造成的频率差,也包含目标速度造成的频率差,此时可用三角波进行频率调制,利用前沿和后沿的频率差区别出距离和速度来。该体制的激光三维成像由于要对激光器强度进行高速调制,因此半导体激光器是理想光源,调制速度和功率大小是一对矛盾,因此要进行远程激光三维成像具有较大挑战性,另外大面阵自混频器件也是关键技术之一。
8 基于距离波门选通的三维激光成像技术
距离选通技术也被称为时间门选通技术,利用的是时间飞行法对目标区域进行距离上的选通成像。距离选通激光成像是采用脉冲激光器和选通型成像器,利用激光回波信号在时间上的先后区分目标与背景的技术。其原理如图6所示。
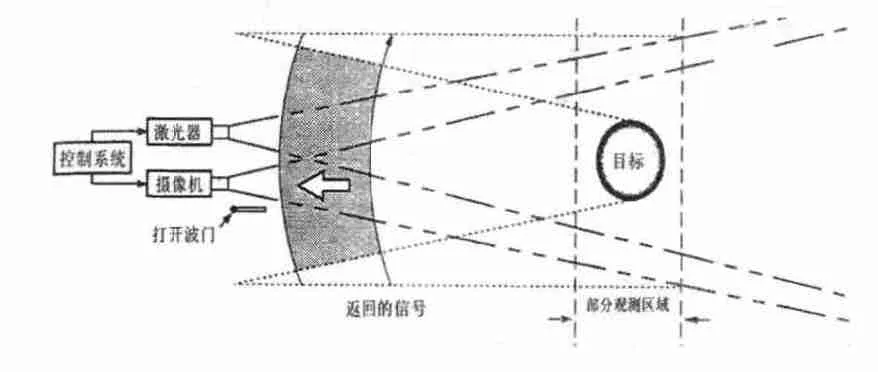
图6 距离选通激光成像技术Fig.6 Range gating laser imaging technology
控制系统通过选择激光波门的延时时间实现对不同距离的目标进行成像,可以选择波门宽度控制成像的景深。对目标进行一次距离选通成像实际得到的是二维图像,通过选择极窄的波门宽度,并且逐步调整波门距离,就可对目标进行切片成像,多幅二维图像的融合构成目标的三维图像。
距离选通成像技术较为成熟,但存在三维成像帧频较慢等问题,另外其三维成像的方式决定了它适用于静止或低速运动的目标,极窄波门脉冲的产生、高精度波门延时控制和数据处理是此类激光雷达的关键技术。
9 结语
激光三维成像是具有广泛用途的前沿技术,目前已开发研制出多种激光三维成像技术。本文总结了不同体制的激光三维成像系统,简介了其工作原理、特点和发展趋势,从作用距离远和探测精度高的要求来看,适用范围最为广泛的是扫描型激光成像体制和基于三维探测器阵列的激光成像体制,其他体制的激光三维成像技术在特定应用场景中也有应用价值。
[1] J Degnan,J McGarry,T Zagwodzki,et al.Design and performance of an airborne multikilohertz,photon-counting microlaser altimeter[J].Int.Archives of Photogrammetry and Remote Sensing,2001,(XXXIV-3/W4):9-16.
[2] R M Marino,T Stephens,R E Hatch,et al.A compact 3D imaging laser radar system using Geiger-mode APD arrays:system and measurements[J].Proc.SPIE,2003,5086:1-15.
[3] A S Huntington,M A Compton,G M Williams.Linearmode single-photon APD detectors[J].Proc.SPIE,2007,6771:67710Q.
[4] Tamburino Louis A,Taboada J.Laser imaging and ranging system using two cameras:US,5157451[P].1992-10-20.
[5] Barry Stann,Mark Giza,Dale Robinson.A scannerless imaging ladar using a laser diode illuminator and FM/CW radar principles[J].Proc.SPIE,1999,3707:421-431.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
数学物理学报(2019年5期)2019-11-29
小哥白尼(趣味科学)(2019年2期)2019-04-17
小学科学(2019年12期)2019-01-06
中成药(2017年12期)2018-01-19
发明与创新(2015年30期)2015-02-27