
外骨骼机器人柔性变刚度驱动器设计
2015-03-23 11:28马挺郭险峰
科技资讯 2014年35期
马挺++郭险峰


摘 要:关节驱动器是外骨骼机器人的核心组成部分,目前传统的刚性驱动器的缺点是:体积大、能耗多以及无法避免外界冲击。为此该文提出一种全新的柔性变刚度驱动器,其基于弹簧的刚度控制,并对此柔性机构进行了理论验证,结果表明全新的柔性变刚度驱动器很好地解决了传统刚性驱动器的主要缺点。
关键字:外骨骼 柔性变刚度驱动器 弹簧
中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2014)12(b)-0065-03
外骨骼原指为生物提供保护和支持的外部结构,外骨骼机器人可以理解为一种结合了人的智能和机器人机械能量的人机结合可穿戴装备[1],可以增强穿戴者机能的一种装备,包括机械结构、相关制动器、弹性部件、传感器和控制元件重量等,还远远达不到实际应用的要求[2]。
如今,外骨骼机器人越来越多的应用于辅助康复功能训练,患者通过穿戴外骨骼机器人,可以进行有效的功能康复训练,达到促进神经系统功能恢复、提高日常生活活动能力的目的[2]。但是,目前绝大多数外骨骼机器人,包括BLEEX[3]、HAL[4]、LoKomat[5]等,其结构均基于“电机+刚性传动副”直接驱动各关节的方式,这种方式带来的无法避免干扰和外界冲击、体积较大以及耗能多等原理上的弊端,因此研究应用于外骨骼机器人上的柔性驱动器显得十分重要。该文将设计一种全新的、能够使外骨骼机器人结构轻巧的柔性驱动器,而且新的柔性驱动器具备吸收消减多余冲击、减小电机能耗以及辅助出力的特点。
1 柔性驱动器的定义
传统刚性驱动器的特点是,能够到达特定的位置或者按照预先设定的轨迹运动,一旦到达指定位置,无论有无外界力施加于驱动器(外界力小于驱动器可承受的最大力),刚性驱动器都能保持在这一位置[6]。
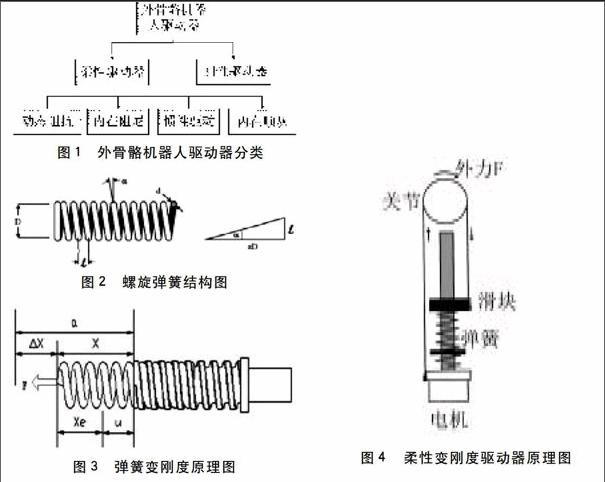
相反,柔性驱动器即使在到达指定位置后,也会因为外界对它施加的力,产生相对于自己平衡位置的位移。柔性机构的平衡位置,一般定义为驱动器产生零力或者零力矩的位置[7]。其中,平衡位置的概念只存在于柔性驱动器,刚性驱动器并无平衡位置这一说法根据上述特点,将外骨骼机器人驱动器分为以下几类,如图1所示。
2 柔性变刚度驱动器的原理
2.1 弹簧的变刚度原理
如图2为一个圆截面圆柱螺旋压缩弹簧的结构图,图中为弹簧的外径,为弹簧的节距,为弹簧的螺旋角,为弹簧丝的直径。弹簧的刚度系数[8],其中为弹簧剪切模量,为弹簧的有效圈数。如果想要改变弹簧的刚度,可以通过改变、、以及。
但是弹簧一旦设计加工完成,、、都均已固定,而有效圈数是弹簧成型后刚度可改变的量之一,也是最简便的可改变量。因此该文的柔性驱动器就是通过改变弹簧的有效圈数来达到改变刚度的目的。
2.2 弹簧变刚度原理
该文柔性驱动器基于结构控制刚度的概念[8]。其基本原理可以描述为:基于一个可以调整有效圈数的螺旋弹簧,通过增加或者减少弹簧的有效圈数来改变驱动器的柔顺度。
因此柔性驱动器的刚度类似于线性弹簧。根据胡克定律,弹簧的应力与应变之间的关系为: 。
如果弹簧的自由长度等于实际长度,那么力为0。这种情况对应于柔性驱动器的平衡位置。对于一个弹簧,平衡位置是固定的,等于弹簧的自由长度。然而,对于该文中柔性机构,可以通过改变弹簧的有效圈数来改变其自身的平衡位置。
图3为弹簧的变刚度原理图[9]。
如图3所示,弹簧套于螺旋轴上,电机转动带动螺旋轴的转动。当固定弹簧,使其无法旋转时,螺旋轴的转动将改变弹簧的有效圈数,使得弹簧沿轴向前进或后退,整个工作过程类似于滚珠丝杠。其中为弹簧自由长度,为弹簧压缩或者伸长后的长度,取弹簧上某点作为弹簧的零点,为弹簧零点相对于外界参考环境的偏移量,为弹簧末端相对于零点的位移。为弹簧压缩量。
根据胡克定律,得到弹簧末端输出力:
其中,因为弹簧几何结构和滚珠丝杠相同,且工作过程类似于滚珠丝杠,那么描述滚珠丝杠的数学模型可以用来描述这种弹簧。主要的区别在于,滚珠丝杠的导程固定不变,而弹簧的节距会因为外力的作用而发生变化。
那么在理想的情况下,电机力矩[10]为
其中为弹簧的外径,为弹簧的螺旋角。
并将记为弹簧常量那么弹簧刚度,为弹簧的压缩量,所以,而弹簧自由长度,那么电机力矩为所以推导得电机功率为
2.3 柔性变刚度驱动器的原理
如图4所示,电机和减速器输出的旋转运动,通过螺旋轴带动弹簧旋转,转化为弹簧末端沿轴向的直线运动,弹簧末端的滑块因此沿导轨进行上下的直线运动,然后通过钢索,将滑块的直线运动转化为转盘的转动。因为转盘与关节处相连,那么转盘转动将会带动关节转动。
3 柔性变刚度驱动器原理验证
该文将柔性驱动器用于外骨骼机器人髋关节的转动。
图5为人体正常行走时髋关节的角度、力矩以及功率(设定步态周期为3.5 s,人体体重为80 kg)
分析髋关节的步态,在人正常行走过程中,髋关节角度值呈正弦曲线变化,髋关节力矩在支撑初期为负值,而在支撑阶段后期以及摆动阶段初期为正值,是因为髋关节要产生正的力矩用以推动腿部前进进入摆动阶段,在摆动阶段后期,髋关节力矩为负值,则是由于髋关节要实现腿部减速完成脚跟着地动作。根据髋关节功率图可知,髋关节在支撑阶段储存能量,在脚尖离地后释放能量推动身体前行,其动作的两个峰值功率分别出现在足跟着地前后和脚尖离地前后。但整个步态周期中,平均功率为正值。
根据公式,对于该文中的柔性机构,和属于选定后就无法改变的量。
并且有两个变量,若要实现在整个步态过程中的最优化,必须选定其中的一个变量,现选定=3000,那么通过合理选择就可以实现在整个步态过程中的最优化,从而使得电机的峰值功率达到最小。endprint
图6为电机功率峰值达到最小时和正常行走的髋关节功率对比图。
分析图6,正常行走的髋关节功率峰值为36 w、-13.5 w,如果采用传统直流无刷电机加减速器直接驱动的方式,那么电机输出的功率
最小为36 w,而采用柔性机构后,驱动电机所需的输出最大功率为25 w,减小了31%。电机所需的最大功率的减小,将会使得所选电机的尺寸更小。
采用柔性机构后,一个步态周期的电机耗能对应电机功率曲线下方的面积,为30 J,而传统的直驱方式,一个步态周期的电机耗能为直驱电机功率绝对值曲线的面积,耗能为38 J,因此采用柔性机构后耗能减小21%,由于外骨骼机器人一般均采用电池供电,那么这将有助于延长外骨骼机器人的使用时间。
4 结语
对于一个理想的柔性关节驱动机构,能够消减外界冲击、减小电机能耗以及辅助出力属于最重要的特征。该文中所设计的柔性机构,相对于传统的电机加减速器直接驱动的刚性驱动模式,电机峰值功率减小了31%,能耗减小了21%,并且弹簧能够对外界冲击进行有效的缓冲,外骨骼机器人关节驱动器的以上这些特点,将极大地延长外骨骼机器人的工作时间以及增大外骨骼的活动范围,提高外骨骼机器人在未知环境下的安全性。
参考文献
[1] 蔡兆云,肖湘江.外骨骼机器人技术研究综述[J].国防科技,2008(12):6-8.
[2] 柯显信,陈玉亮,唐文彬.人体下肢外骨骼机器人的发展及关键技术分析[J]. 机器人技术与应用,2009(6):28-32.
[3] Zoss A B, Kazerooni H,Chu A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX)[J]. Mechatronics,IEEE/ASME Transactions on,2006,11(2):128-138.
[4] Sankai Y. Hal: Hybrid assistive limb based on cybernics[M]//Robotics Research. Springer Berlin Heidelberg, 2011:25-34.
[5] Jezernik S, Colombo G, Keller T, et al. Robotic orthosis lokomat: A rehabilitation and research tool[J]. Neuromodulation:Technology at the neural interface,2003,6(2):108-115.
[6] 樊晓平,徐建闽.柔性机器人的动力学建模及其控制[J].控制理论与应用, 1997,14(3):318-329.
[7] 黄则兵,葛文杰,马利娥.柔性机构的研究现状及其在仿生领域的应用前景[J].机械设计与研究,2004(z1):279-282.
[8] 张英会,刘辉航,王德成.弹簧手册[M].北京:机械工业出版社,1997.
[9] Hollander K W, Sugar T G, Herring D E. Adjustable robotic tendon using a'JackSpring'[C]//Rehabilitation Robotics, 2005. ICORR 2005.9th International Conference on.IEEE,2005:113-118.
[10] 杨祖孝.进给滚珠丝杠副传动刚度的计算[J].制造技术与机床,1999(7):12-14.endprint
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
中国典型病例大全(2022年10期)2022-05-10
中国典型病例大全(2022年9期)2022-04-19
电脑爱好者(2020年6期)2020-05-26
电脑爱好者(2019年15期)2019-10-30
轻兵器(2019年5期)2019-06-21
现代兵器(2017年4期)2017-06-02
中国信息化周报(2017年4期)2017-03-23
大众健康(2016年3期)2016-05-31
轻兵器(2016年8期)2016-04-25
