
基于图像跟踪识别技术的煤炭运量视频管理系统的硬件设计及实现
2015-04-02 16:34金世佳
农业科技与装备 2014年12期
摘要:为了有效地监控煤场进出车辆情况,设计一种基于图像跟踪识别技术的煤炭运量视频管理系统。介绍该系统硬件的整体设计,详细说明其中车辆到达感应部分、图像采集部分和云台控制部分的具体设计与实现方法,以期为该系统的良好应用提供参考。
关键词:视频监控系统;硬件;设计;实现
中图分类号:TP391.41 文献标识码:A 文章编号:1674-1161(2014)12-0017-03
煤炭资源对于国民经济的发展具有至关重要的作用,因此要对煤炭资源的开采与利用进行有效监控与保护。为此,提出基于图像跟踪识别技术的煤炭运量视频管理系统。这里介绍该系统的硬件设计与实现。
1 系统硬件整体设计
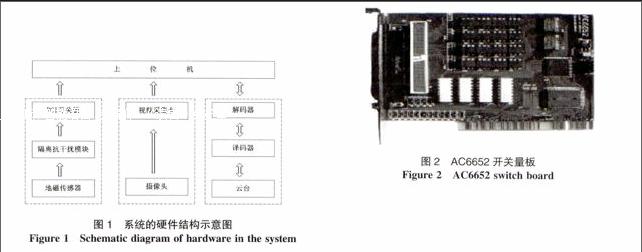
系统使用DVR-SV4125的工业级计算机作为上位机,该计算机抗干扰能力强,能够在恶劣的环境下正常工作。考虑到整个视频监控系统的应用环境,将系统硬件设计为车辆到达感应部分、图像采集部分、云台控制部分及上位机4个部分(如图1所示)。
2 车辆到达感应部分的硬件设计及实现
2.1 PCI开关板
AC6652(如图2所示)是一款低价格通用光电隔离I/O板,具有16路输入、16路输出。采用PCI总线,支持即插即用,无需地址跳线。采用大规模可编程门阵列设计,提高可靠性。AC6652的输入支持5~24 V输入,同时输出为集电极开路输出(OC输出,输出芯片为6N33或TIL113),输出驱动电流大于30 mA,可以方便地驱动小型继电器、LED等负载。AC6652采用CH系列PCI接口芯片及门阵列作为主控芯片。AC6652具有光电隔离的作用,有大规模可编程门阵列,可靠性高。可以接收来自AC140的信号,然后经过模块处理,转换为PCI通信格式,使上位机读取车辆到来的数字量信号,或者通过该模块的写操作向下位机发送操作命令。
2.2 隔离抗干扰模块
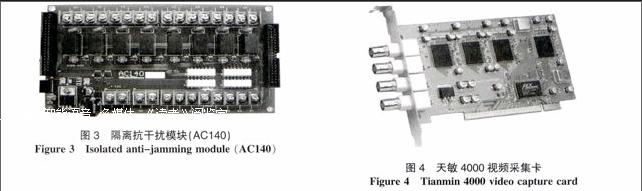
由于整个系统工作环境比较恶劣,容易对输入信号带来干扰,为保护现场的正常信号,设计隔离抗干扰模块(如图3所示),选用具有光电隔离功能的端子卡AC140。
AC140端子的连接方式为:1) K0~K7,分别对应8个继电器0~7的常开开关接点,每个K接点都是2个接线端子,对应一路的继电器开关接点。2) DI0~DI7,分别对应8路光电隔离输入0~7号。3) GND,光电隔离输入地线,即DI0~DI7的地线。4) POWER,对应+12 V电源输入,且电源负极与光电隔离输入地线GND相互隔离。
2.3 地磁传感器
整个视频监控系统开始工作的首要条件是:要准确地感应到车辆的到来。感应车辆到来的方法很多,如红外线、超声波、地磁感应等。超声波传感器容易受环境的影响,当风速在6级以上时,反射波会产生漂移而无法正常检测;探头下方通过人或物也会产生反射波,造成误检。红外传感器会因工作现场的灰尘、冰雾而影响系统正常工作。而地磁信号受环境因素影响较小,且比较稳定,所以该系统采用地磁传感器。
地磁传感器利用车辆通过道路时对地球磁场的影响来完成对车辆的检测。地球磁场在几公里之内基本上是恒定的,但大型的铁磁性物体会对地球磁场产生巨大的扰动。当车辆通过时,对地磁的影响将达到地磁强度的几分之一,而地磁传感器可以分辨出地球磁场1/6 000的变化,因此利用地磁传感器来检测车辆具有极高的灵敏度。
3 图像采集部分的硬件设计及实现
3.1 视频采集卡
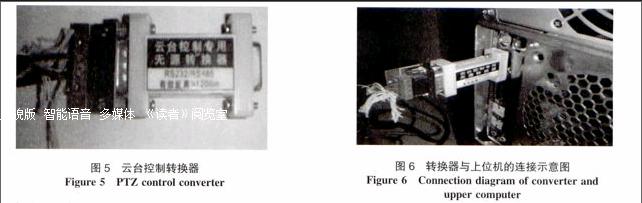
在PC机上通过视频采集卡可以接收来自视频输入端的模拟视频信号,对该信号进行采集并量化成数字信号,然后压缩编码成数字视频。由于视频采集卡具备硬件压缩的功能,在采集视频信号时首先在卡上对视频信号进行压缩,然后再通过PCI接口把压缩的视频数据传送到主机上。一般的PC视频采集卡采用帧内压缩的算法把数字化的视频存储成AVI文件,高档一些的视频采集卡还能直接把采集到的数字视频数据实时压缩成MPEG-1格式的文件。由于模拟视频输入端可以提供不间断的信源,视频采集卡要采集模拟视频序列中的每帧图像,并在采集下一帧图像之前把这些数据传入PC系统,因此,实现实时采集的关键是每一帧所需的处理时间。如果每帧视频图像的处理时间超过相邻两帧之间的相隔时间,则会导致数据的丢失,即丢帧现象。采集卡都是把获取的视频序列先进行压缩处理,然后再存入硬盘,即视频序列的获取和压缩是在一起完成的,免除了再次进行压缩处理的不便。不同档次的采集卡具有不同质量的采集压缩性能。该系统采用天敏4000视频采集卡(如图4所示)。
3.2 摄像头的选型及特点
系统采用Sony公司的EVI-D30彩色摄像机。EVI-D30摄像机的主要功能是自动跟踪功能(Auto Tracking),可以不停地自动摘取用户预定义的主题。围绕选择的主题,EVI-D30会摘取相似的像素颜色和明亮度。EVI-D30有4种预定义的主题:自动跟踪功能、自动聚焦、自动曝光和运动检测。
4 云台控制部分的硬件设计及实现
4.1 云台
云台是安装、固定摄像机的支撑设备,分为固定云台和电动云台两种。固定云台用于监视区范围不大的场合,使用时将摄像机固定于云台上,调整好摄像机水平、俯仰的角度,达到最好的工作姿态,然后锁定调整机构即可;电动云台可以扩大摄像机的监视范围,提高摄像机的使用价值,主要用于对大范围进行扫描监视,电动云台调整姿态通过两台执行电动机来实现,电动机接受来自控制器的信号精确地运行定位,在控制信号的作用下,云台上的摄像机既可自动扫描监视区域,也可在监控中心值班人员的操纵下跟踪监视对象。
根据回转的特点,云台可分为左右旋转的水平旋转云台和既能左右旋转又能上下旋转的全方位云台。云台水平转动的角度为0~350°,俯仰角度为0~90°。有的云台还有自动巡视功能。根据使用的环境,云台还可分为室内用云台和室外用云台。选择云台的主要指标为回转范围、承载能力和旋转速度。一般的云台均属于有线控制的电动云台。
4.2 云台设备安装
云台通常是与摄像头结合在一起的, 摄像头提供额外的线路用于云台设备与计算机的连接。该线路通常以COM端口的形式连接计算机,在线路的一端连接有云台控制转换器(如图5所示)。
云台控制转换器以COM端口的形式连接计算机,图6显示了云台控制转换器与上位机的连接。
4.3 云台控制分析
计算机与云台之间的通信是通过串行通信实现的。PC机只拥有标准RS-232接口,而云台只提供工业标准的RS-485接口,因此中间需要一个RS232-485转换器,以将RS-232信号转换为RS-485信号。云台通过云台解码器、RS232-485转换器与计算机串口相连,程序通过向云台解码器发送指令来实现云台控制。这里的指令是由云台控制协议确定的。不同的厂家,云台控制协议也不尽相同。该系统所采用的协议是PELCO-D2400。
参考文献
[1] 刘效静,成瑜.汽车牌照自动识别技术研究[J].南京航空航天大学学报,2003,30(5):573-576.
[2] 崔家磊.风云一号接收系统定时同步与PCI接口研究[D].西安:西安电子科技大学,2008.
[3] 詹诩强,戚飞虎,刘天明.基于MPEG-2视频流的目标跟踪快速算法[J].上海交通大学学报,2001,35(9):1 321-1 324.
[4] 金世佳.图像跟踪识别技术在煤炭运量视频管理系统中的应用研究[D].沈阳:东北大学,2010.
猜你喜欢
现代商贸工业(2016年8期)2017-01-07
电子技术与软件工程(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年28期)2016-12-21
电脑知识与技术(2016年27期)2016-12-15
办公室业务(2016年9期)2016-11-23
电脑知识与技术(2016年25期)2016-11-16
中国新通信(2016年16期)2016-10-18
中国新通信(2016年16期)2016-10-18
