
卡尔曼滤波在路面检测信号处理中的应用
2015-04-30 21:15申继鹏
中国高新技术企业 2015年13期
摘要:卡尔曼滤波是一种应用相当广泛的滤波方法。文章将卡尔曼滤波算法用于路面垂直载荷信号处理,通过数学建模、理论分析及实验验证,得到经过卡尔曼滤波算法处理后的路面垂直载荷,提高了数据的可靠性与真实性,对路面检测信号处理研究及采集人员分析路面状况具有重要意义。
关键词:卡尔曼滤波;路面垂直载荷;信号处理;数学建模;路面检测信号 文献标识码:A
中图分类号:TP206 文章编号:1009-2374(2015)13-0042-02 DOI:10.13535/j.cnki.11-4406/n.2015.13.022
路面不平度的检测一直是路面评价中的一个难点,其主要原因是路面不平度检测仪的研发和理论评价体系的研究起步较晚,研究成果尚不成熟。卡尔曼滤波是一种常用的高效滤波算法,具有精确稳定等特点,可通过预计将来误差来消除误差。在工业应用中,路面不平度反映了路面程度的好坏,而路面状况检测信号通常是由一加速度传感器间接测量得到的,由于检测装置的不完善性以及路面状况的复杂程度等问题,得到的数据通常存在很大的误差,这些数据含有将会导致测量失败的噪声,不能实时准确地反映出路面状况的好坏,严重影响检测结果。本文将卡尔曼滤波算法用于路面检测信号数据的处理,方案合理可靠,稳定便捷。
1 卡尔曼滤波数学模型的建立
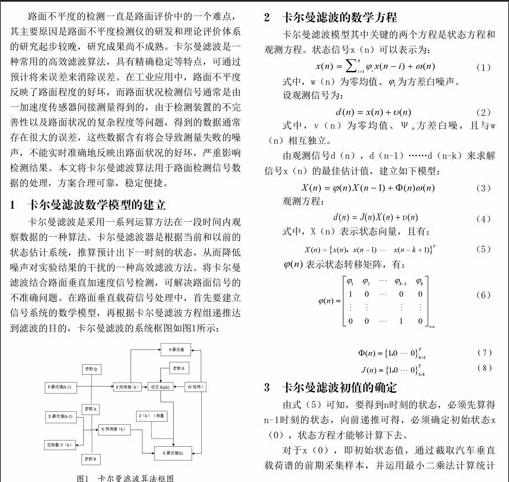
卡尔曼滤波是采用一系列运算方法在一段时间内观察数据的一种算法。卡尔曼滤波器是根据当前和以前的状态估计系统,推算预计出下一时刻的状态,从而降低噪声对实验结果的干扰的一种高效滤波方法。将卡尔曼滤波结合路面垂直加速度信号检测,可解决路面信号的不准确问题。在路面垂直载荷信号处理中,首先要建立信号系统的数学模型,再根据卡尔曼滤波方程组递推达到滤波的目的,卡尔曼滤波的系统框图如图1所示:
图1 卡尔曼滤波算法框图
2 卡尔曼滤波的数学方程
卡尔曼滤波模型其中关键的两个方程是状态方程和观测方程。状态信号x(n)可以表示为:
(1)
式中,w(n)为零均值、为方差白噪声。
设观测信号为:
(2)
式中,v(n)为零均值、Ψυ方差白噪,且与w(n)相互独立。
由观测信号d(n),d(n-1)……d(n-k)来求解信号x(n)的最佳估计值,建立如下模型:
(3)
观测方程:
(4)
式中,X(n)表示状态向量,且有:
(5)
表示状态转移矩阵,有:
(6)
(7)
(8)
3 卡尔曼滤波初值的确定
由式(5)可知,要得到n时刻的状态,必须先算得n-1时刻的状态,向前递推可得,必须确定初始状态x(0),状态方程才能够计算下去。
对于x(0),即初始状态值,通过截取汽车垂直载荷谱的前期采集样本,并运用最小二乘法计算统计模型,将其回归系数确定为X(0),同时可以求出P(0)。根据采集样本的误差协方差来确定Ψυ的初值。
4 卡尔曼滤波递推公式的确定
由状态空间模型得到卡尔曼滤波递推公式如式(9):
(9)
在式(9)中,(n|n)为n时刻滤波的初始状态;(n|n-1)为n-1时刻滤波状态;A(n)为n时刻滤波器的增益矩阵;P(n|n-1)为误差的协方差矩阵;P(n|n)为滤波误差的协方差矩阵;I为单位矩阵。Z(n)作为汽车垂直载荷数据滤波方程的输入量(若加速度传感器水平安装,则取Z轴方向传感器数据为汽车垂直载荷数据),进行数据滤波。
5 方案验证
将加速度计采集的路面数据作为卡尔曼滤波的输入,将处理后的数据发送至上位机。再通过MATLAB仿真,可显示出滤波之后的路面信号曲线。
图2
由仿真后输出信号可以看出,经过卡尔曼滤波后的数据曲线明显没有了毛刺、突变等现象,平滑稳定,在发生数据突变或者采集器不稳定这种情况下,卡尔曼滤波都可将这种突变信号滤波除去,保证了检测到数据的真实性,大大减少了外界因素及自身误差对数据的影响,处理后数据符和要求,对以后的路面等级评定、路面维护等具有科学性。
6 卡尔曼滤波的应用
卡尔曼滤波是一种最优化自回归数据处理算法,它的应用包括航空领域轨道计算、机器人系统智能控制、雷达系统与导航追踪等。近年来更被应用于组合导航与动态定位、天气预测、传感器数据融合、微观经济学等应用研究领域,特别是在图像处理领域如人脸识别、图像分割、图像检测等研究领域占有重要地位。本文提到的将此运用于路面信号处理拓宽了其研究范围,提高了其利用率。
7 结语
目前,在路面不平度检测技术及仪器设备方面,我国与发达国家的差距仍然显著,而这种现状在很多时候影响了我国道路质量管理及周期性评价。路面信号的检测本文将卡尔曼滤波成功运用于路面检测数据的处理,方案合理可靠,是路面检测信号处理的高效简便方法,实用性强,研究价值高,在今后相关领域中都可采用类似处理方法,同时也解决了路面信号处理难度大这一难题,减轻了采集研究人员繁重的工作量,保障了路面检测数据的真实性。
参考文献
[1] 范洪达,李相民.卡尔曼滤波算法的几何解释[J].火力与指挥控制,2002,27(4).
[2] 邓自立.自校正滤波理论及其应用——现代时间序列分析方法[M].哈尔滨:哈尔滨工业大学出版社,2003.
[3] 王建文,税海涛,马宏绪.卡尔曼体系下的滤波算法计算框架[J].数据采集与处理,2009,(1).
[4] 范洪达,李相民.卡尔曼滤波算法的几何解释[J].火力与指挥控制,2002,(4).
[5] WALTER T. A comparison of complementary and kalman filtering[J].HIGGINS Member,IEEE Arizona State University Tempe,Ariz.
[6] 付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[7] 黄卫全,董冀.基于MTi微惯性航姿系统的卡尔曼滤波器设计[J].自动化技术与应用,2009,28(1).
作者简介:申继鹏(1993-),男,甘肃古浪人,江苏科技大学电子信息学院本科在读学生,研究方向:电子信息。
(责任编辑:陈 倩)endprint
猜你喜欢
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
北京航空航天大学学报(2017年9期)2017-12-18
考试周刊(2016年84期)2016-11-11
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
电子设计工程(2014年6期)2014-02-27
