控位滑行航行器近水面波浪力计算与运动分析
2015-05-05 05:59王一旭胡欲立钟如意
机械与电子 2015年5期
王一旭,胡欲立,钟如意
(西北工业大学航海学院,陕西 西安710072)
0 引言
作为一种新兴的水下航行器,水下滑翔机除了能源利用率高甚至不需要任何能源作为动力就可长时间续航外,还具有结构简单、阻力低、噪声小等优点,可作为一种长时间机动部署的水下运载平台或监测平台,但水下滑翔机由于机动性太差的问题,无法满足特定的控位运动要求[1]。
近几年,在水下滑翔机的基础上发展出了控位滑行航行器,通过将无动力滑翔和有动力推进两种航行器特点的结合,使得这种新型水下航行器同时具备了两者的优点,它结合了两种航行器的优点,有效规避了不足。
1 控位滑行航行器的结构和工作原理
1.1 控位滑行航行器的结构
控位航行器外部由机头、机身、机翼、尾舵、螺旋桨和导流罩等部分组成。航行器内部由净浮力调节系统、重心调节系统、姿态调节系统、能源与供应系统、控制系统、传感器系统、导航系统和推进系统等8个部分组成。
1.2 控位滑行航行器的工作原理
控位滑行航行器主要有2种工作模式,滑行运动和控位运动。在滑翔模式下,航行器通过改变自身净浮力作为其在水下下潜或上浮的驱动力,并辅以调节重心与浮心的相对位置来改变航行姿态,以此实现其在水下沿锯齿状轨迹进行滑翔。
在海况较差、航行器有特定的位置控制要求时采用动力推进方式。控位运动是指航行器在运动过程中实现特定垂直深度、水平位置和水平航向的控制,通过动力推进和调整航行器姿态来保证航行器在符合要求的小范围内的运动。
特定垂直深度的控位运动是通过在一定的推力作用下,调整净浮力和水平舵角,使航行器以一定的攻角向前航行,由此产生的力和力矩逐渐达到平衡,最终实现航行器维持在一定深度的稳定航行,如图1所示。
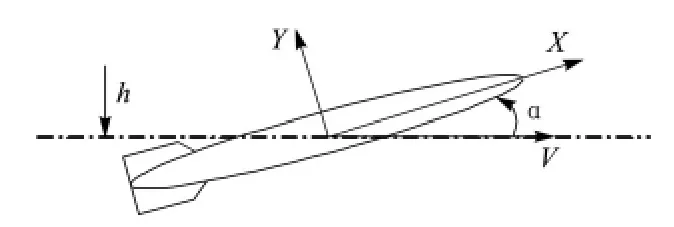
图1 垂直深度控位运动
水平航向控制则是在动力推进作用下保持给定的水平航行方向不变的稳定航行运动。水平位置控制的控位运动是通过在一定的推力作用下,航行器的位置控制或航向控制的运动。位置的保持是航行器通过在动力推进时保持一定的垂直舵角,使航行器在水平方向以一定的半径R做回转运动,在相应的力和力矩达到平衡后,最终实现航行器在水平方向的稳定回转运动,如图2所示。

图2 水平位置控位运动
当航行器在运动过程中因受各种外力因素影响,出现垂直深度或水平方向的偏差时,可分别通过调节航行过程中的水平舵角和垂直舵角来实现变深航行小机动如图3所示,深度从h1到h2;水平偏转小机动如图4所示,航向从A向到B向,进而实现深度或航向纠正,从而最终回归原来的运动状态。

图3 变深航行小机动

图4 变水平航向小机动
2 波浪力计算的理论模型[2-4]
AQWA水动力软件的LINE模块采用在频率域内,采用线性波浪理论获得的海洋结构物的水动力参数。下面对规则波作用下的,求解一阶边界问题以及一阶波浪力。对规则波作用下的,一阶线性入射波势为:

求解一阶绕射势和辐射势需要用到以下边界条件:
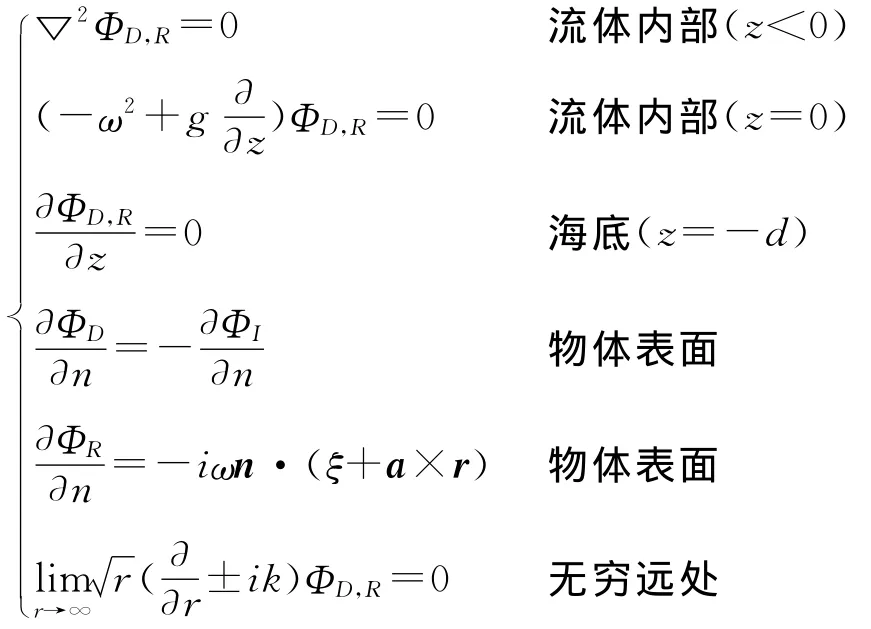
ΦD为由于固定物体存在所产生的绕射势;ΦR为物体进行一阶运动所产生的辐射势;r为物体表面的位置向量;n为物体表面的单位法向量,方向朝外。
总速度势可以表示为:

κ为波浪斜率,定义为:

L为波长。
在求解得到一阶绕射势和辐射势后,就可以得到一阶的波浪力、力矩以及自由波面高程,水动压强和自由表面高程为:
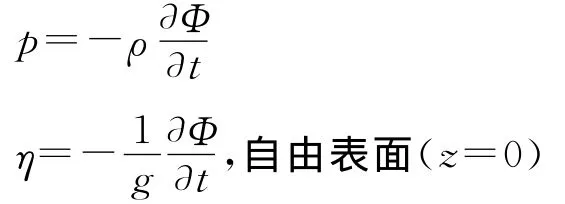
沿着物体沾湿表面积分即可得到总的波浪力(F1,F2,F3)和力矩(F4,F5,F6):

Sb为物体沾湿表面。
3 波浪力计算与结果分析
3.1 波浪力计算条件
考虑航行器在近水面(0~50m)、在2级海况下做控位运动受波浪力影响。因此,需要计算此条件下航行器受到的波浪载荷。同时,不同波浪入射角对航行器所受波浪力也会有所影响。由于航行器本体关于体坐标系Bxy平面对称,波浪入射角仅考虑0°~180°即可。因此,将在表1和表2所示工况条件下计算控位滑翔航行器受到的波浪载荷情况。

表1 2级海况参数[5]
表2 深度和波浪入射角参数[5]
3.2 航行器近水面受波浪力结果分析
2级海况时航行器在不同深度和入射角受到的力和力矩(频域)情况分别如图5和图6所示。
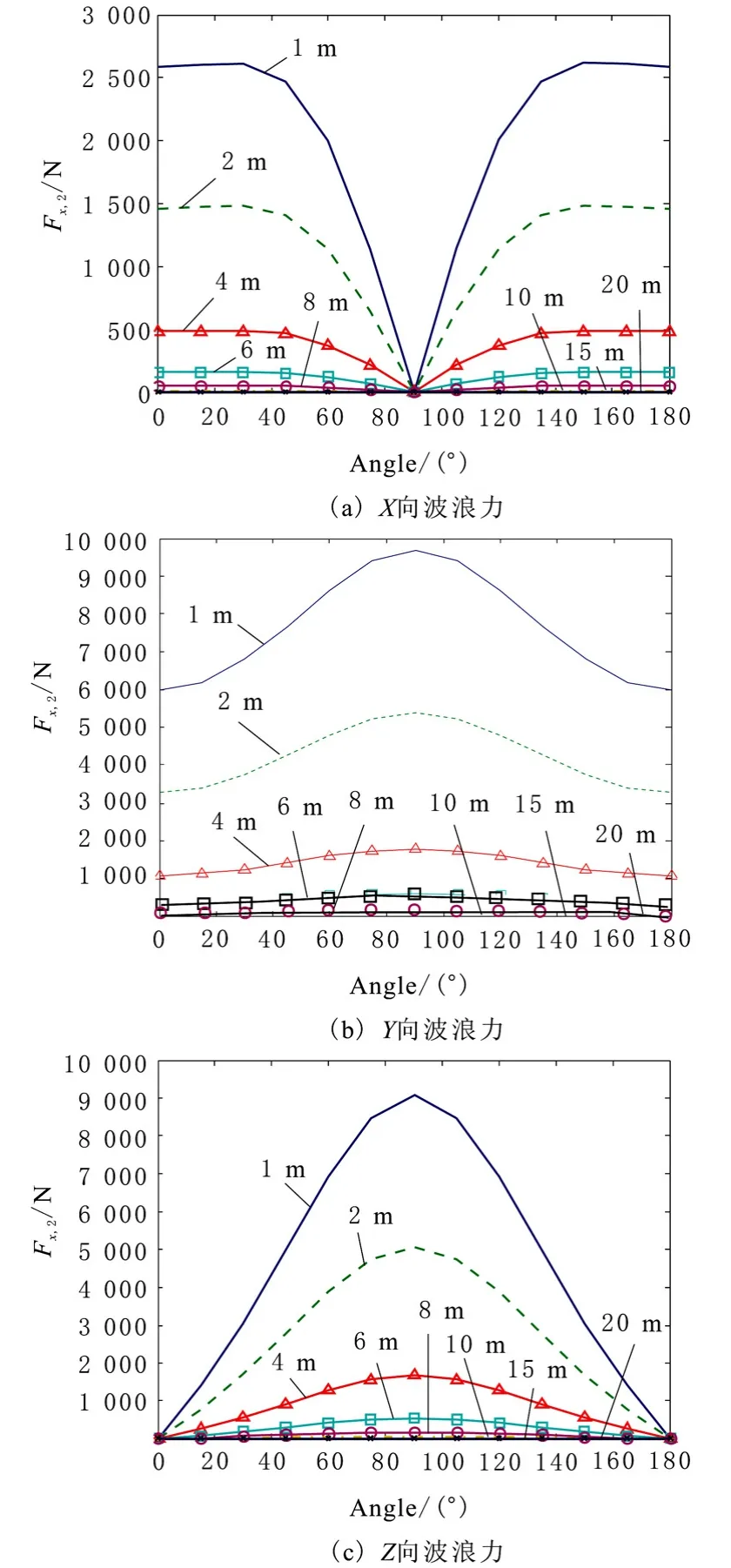
图5 2级海况下波浪力
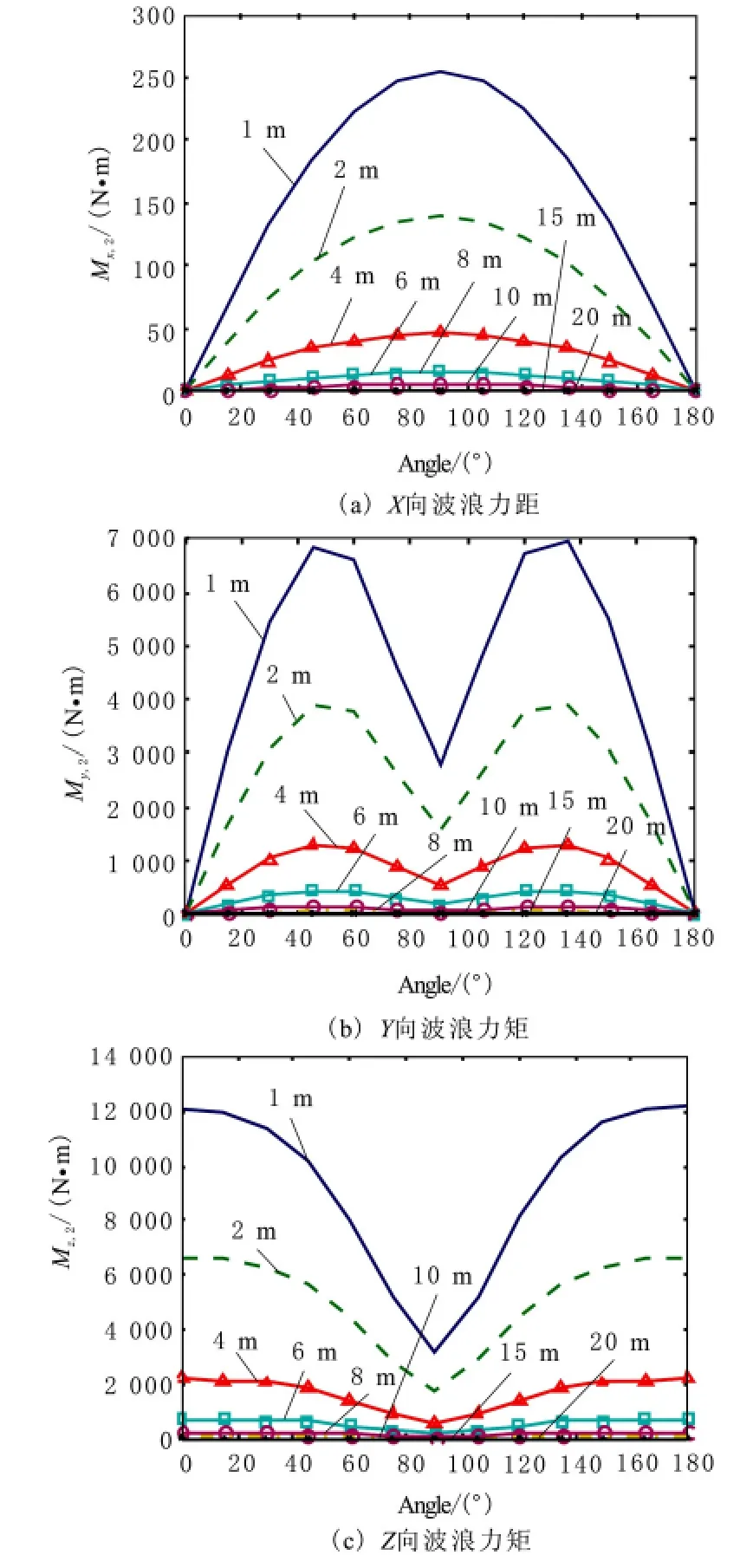
图6 2级海况下波浪力矩
分析2级海况下航行器波浪力计算结果可知:
a.波浪力各分量近似相对于90°所在轴线对称。
b.航行器受波浪力随深度迅速减小,且当深度约为半波长时,波浪力的作用效果基本可以忽略。
c.对于航行器水平面内的轴向力和侧向力,波浪入射角对航行器受力的方向性较明显。表现在90°入射时航行器轴向力最小,而此时侧向力达到最大;0°和180°入射时航行器轴向力最大或近似最大,而此时侧向力达到最小值。
d.波浪入射角对于航行器垂向力(深度方向)的影响相比其他2个力分量的相对影响要小得多。
e.波浪对航行器的作用效果主要体现在侧向力和垂向力上,波浪的轴向力作用相对较弱,这与航行器轴向受力面积较小有关。
由2级海况下航行器波浪力矩计算结果可知:
a.与波浪力相同,波浪力矩各分量近似相对于90°所在轴线对称。
b.同样,航行器受波浪力矩随深度迅速减小,当深度约为半波长时基本可以忽略波浪力的作用。
c.航行器横滚力矩和偏航力矩受波浪力入射角影响较大,波浪入射角对航行器影响的方向性较明显。航行器横滚力矩和偏航力矩均在0°和180°时最小,横滚力矩在90°时达到最大,而偏航力矩则是在[45°,60°]和[120°,135°]内达到最大。
d.波浪入射角对于航行器俯仰力矩的影响相比其他两个力分量的相对影响要小得多。
e.波浪对航行器的作用效果主要体现在俯仰力矩和偏航力矩上,波浪对横滚力矩作用相对较弱。
4 波浪力对定深控位运动的影响分析[6]
4.1 波浪力的作用效果
在2级海况下,从-15m深度开始,对定深目标-4m进行仿真,对比无波浪力作用时的仿真结果,其结果如图7所示。
由图7可知,当航行器深度较大时,波浪力的作用效果较弱,航行器各运动参数与无波浪力时基本相同;当航行器逐渐靠近水面时,波浪力的作用效果越来越明显;波浪力的作用,使得航行器无法实现无波浪力时的定深控位目标,航行器深度方向处于振荡状态,振荡区间为[-4.314 6,-4.212 3],振荡幅值为0.051 15m,其中心位置与无波浪力作用时的差值为-0.263 5m;航行器其他运动参数中心值变化趋势与无波浪力相同。
4.2 波浪力对水平控位运动的影响分析
4.2.1 波浪力对水平直线运动的影响分析
在2级海况下,波浪入射角为45°,对-4m深水平面内的初速度为0的航行器直线控位运动进行仿真,对比无波浪力作用时的仿真结果,其结果如图8所示。
由图8可知,相比无波浪力作用,波浪力对水平直线运动的作用效果是使得航行器弹道轨迹有了一个水平偏移,但航行器通过后期舵偏调节,使得运动方向差别不大;使运动速度有了一定幅度的振荡,且中心值(或等效值)更小,进而导致相同时间内的航程更短;其他各参数也存在不同程度的振荡。
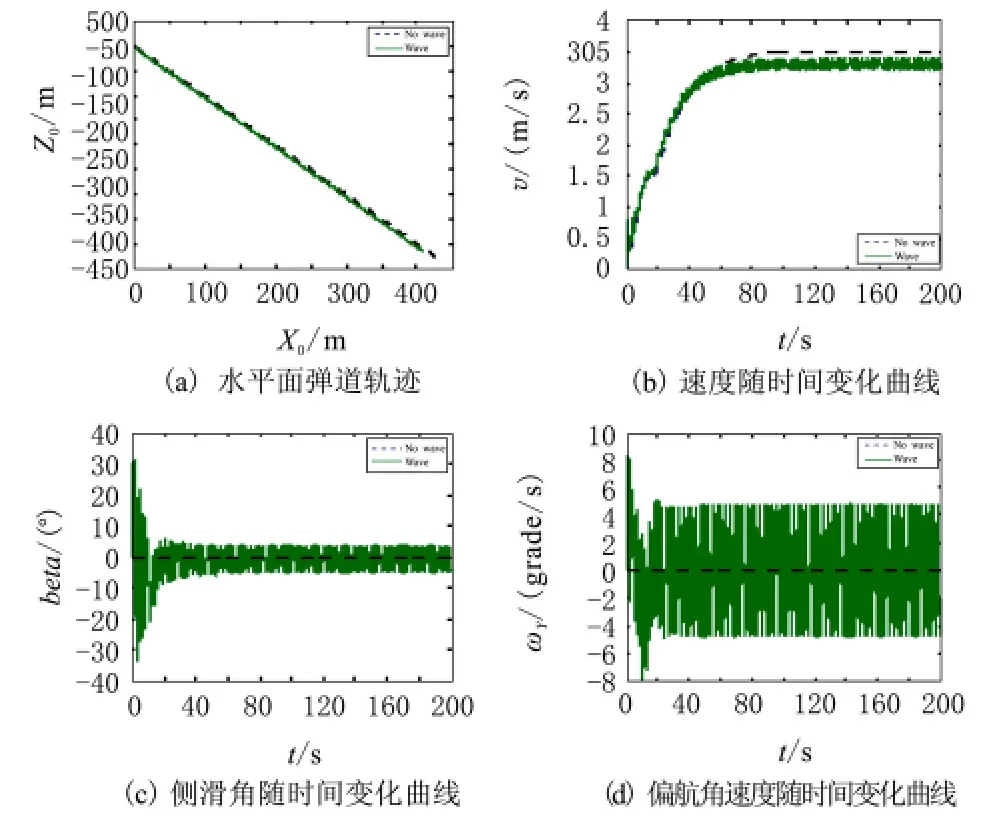
图8 有无波浪力直航控位运动参数对比

图7 有无波浪力定深控位运动参数对比
4.2.2 波浪力对水平回转控位运动的影响分析
在2级海况下,对-4m深水平面内的航行器回转控位运动进行仿真,对比无波浪力作用时的仿真结果,其结果如图9所示。

图9 有无波浪力水平回转控位运动参数对比
由图9可知,相比无波浪工况,波浪力作用的显著效果是,弹道轨迹不再是规则圆形,波浪的作用使得航行器存在不稳定的侧滑角,导致航行器回转中心和半径随时间存在一定程度的变化,弹道轨迹变得不再规则;回转控位运动中心产生偏移,2级海况波浪作用下的航行器回转中心坐标为(8.81,29.38),相比无波浪作用时的坐标(16.92,25.86),中心偏距达到了8.841m;各运动参数出现不同程度振荡,且振荡幅值周期性变化,振荡幅值的周期性变化与回转运动过程中航行器轴线与波浪前进方向的夹角周期性变化有关,可等效于波浪入射角的周期性变化。值得注意的是,2级海况下,航行器的回转半径为17.285m,较无波浪作用时的17.3m差别不大,也即航行器在2级海况下还能基本满足回转运动的功能要求。
5 结束语
利用AQWA软件计算得到了控位滑行航行器在不同深度和波浪入射角时的波浪力和力矩,仿真分析了航行器在波浪载荷作用下的定深和水平控位运动弹道。
针对航行器在2级海况波浪作用下的几个典型工况进行的仿真分析表明,相比无波浪作用,波浪的存在,使得航行器各运动参数产生一定的偏差和振荡,航行器的控位运动参数不再稳定不变。
[1] 马冬梅,马峥,张华,等.水下滑翔机水动力性能分析及滑翔姿态优化研究[J].水动力学研究与进展,2007,22(6):703-708.
[2] 邓文彬.船舶与海洋工程产品设计的领航员AQWA&ASAS[J].中国制造业信息化,2006(8):58-59.
[3] 刘鲲.深海半潜式平台浪激响应分析及垂荡响应控制[D].大连:大连理工大学,2010.
[4] 唐东洋.风浪联合作用下深水半潜式平台水动力性能实验研究[D].大连:大连理工大学,2010.
[5] 李天森.鱼雷操纵性[M].北京:国防工业出版社,1999.
[6] 张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
装备制造技术(2020年3期)2020-12-25
当代陕西(2020年24期)2020-02-01
中学数学研究(广东)(2019年12期)2019-07-18
小哥白尼(趣味科学)(2018年12期)2018-12-18
弹箭与制导学报(2018年3期)2018-08-28
石油地球物理勘探(2017年2期)2017-11-23
船海工程(2015年4期)2016-01-05
应用海洋学学报(2015年3期)2015-11-22
舰船科学技术(2015年8期)2015-02-27