
基于三维激光扫描的复杂空区点云处理技术研究
2015-05-11 08:12王运森闫腾飞安龙
有色金属科学与工程 2015年2期
王运森, 闫腾飞, 安龙
(东北大学资源与土木工程学院,沈阳110004)
0 引 言
由于我国矿业前期的不规律开采,尤其是私人对地下矿石的乱采以及盗采,使得矿山地下形成了各种大大小小、形状不一、地理位置不清的采空区.这些不明采空区对矿山的安全生产造成了严重威胁,因此,探明这些潜在的采空区对矿山安全生产来说显得至关重要[1-4].
针对这些问题,我国矿业科技工作者先后做了大量的工作,如通过探地雷达、地震波探测、电阻率测井、GIS等手段来探测空区[5-9],然而这些方法均不同程度地存在着抗干扰能力弱,勘探深度有限,解译过程繁琐,可视化程度低,探测结果精度不高等缺点.激光探测技术作为近年来发展起来的一种新技术,具有探测精度高,探测速度快,成像直观立体等优点,在各类空区的精确探测上显示了独有的优势[10-13].
目前,CMS系统在欧美发达国家地下空区扫描方面得到了广泛的运用,能得到完整的、全面的、连续的、关联的全景点三维坐标数据“点云”,然而由于采空区的空间位置的复杂性,取得的点云数据量巨大,CMS系统自带的软件一般不具有较好的建模能力,本文针对这些应用中的难点,综合利用Geomagic、3DMINE等软件,开展了利用CMS进行复杂空区测量的现场测量方案与后期点云处理流程方面的研究.
1 CMS工作原理及探测方法
1.1 CM S工作原理及组成结构
CMS的基本构成包括激光扫描头、伺服驱动马达控制系统、电源、数据接收器、手持式控制器及数据处理软件[1-4].通过伺服控制系统及内置的反光镜,使脉冲激光束在水平及垂直2个方向上快速移动.其工作原理如图1所示,激光扫描头按照手持控制器设定的精度要求抬高一定的倾角,在这个倾角下做一次围绕横轴的360°扫描,同时记录本次扫描的倾角及距离数据,完成后再增大倾角,做另外一次扫描,直到到达设定的倾角扫描范围(140°).
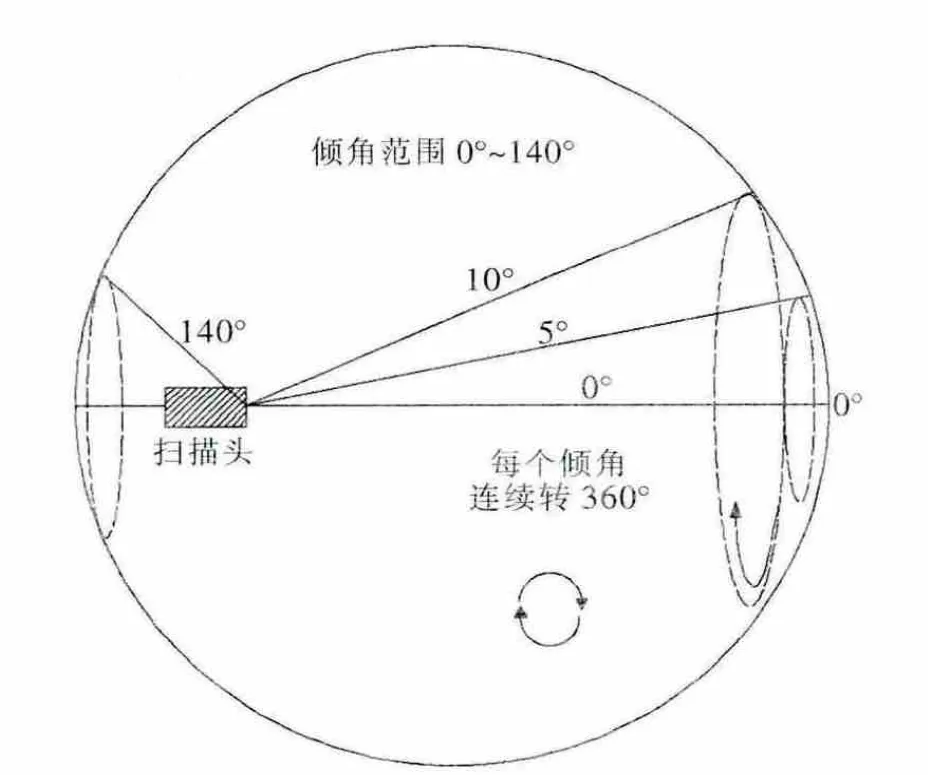
图1 CM S工作原理示意图
1.2 复杂空区探测方法
利用CMS探测采空区现场测量方案:
1)根据空区探测现场具体情况,选择架设地点时需要综合考虑安全、便于设备架设和便于测定支架上2个靶标点坐标等因素.针对由于测量空间的限制,不具备使用延长杆的情况,设计了基于激光笔的虚拟延长杆来确定靶标点坐标;对于结构复杂,存在遮挡,无法一次性全区域扫描的空区,则要分析空区大致形态,布置多个测点.如图2所示.
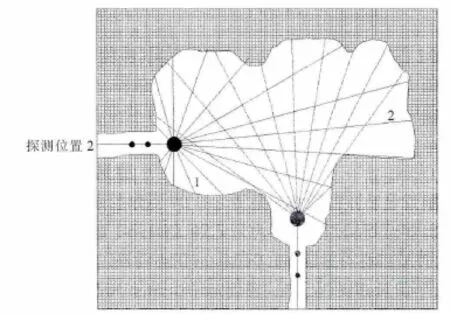
图2 复杂空区探测示意图
2)对于相对安全的以及测量人员可以进入的地下空区领域,可以将CMS设备用三脚架架设在空区里;对于人员无法进入的危险空区,将激光扫描头用支撑杆伸入到待测空区内,尽可能使扫描头的激光不被遮挡.
3)设备架设妥当后,工作人员手持无线控制器在较安全的位置监控CMS探测过程,控制器里装有CMS控制软件,它可以设置扫描的精度、倾角角度范围,并且可以实时显示空区的扫描进程以及点云的分布形态.
4)用全站仪测定CMS扫描头支架上的2个靶标测点的坐标,系统利用这2个坐标点计算出扫描头的原点坐标,进而把每个测点的极坐标转化为矿山实际坐标,这样便于后期点云数据处理(点云拼接、三维建模等).
5)探测数据预处理和存储.首先激光扫描头获取点的空间相对极坐标信息,然后通过数据接收器接收并缓存,接着探测数据以无线方式发送到手持控制器或者现场笔记本计算机中,结合全站仪测定的2个靶点的真实坐标进行数据预处理,CMS所获得的初始数据是二进制类型数据,必须通过CMS初始软件将数据由二进制类型转化为“DXF”“ASC”和“XYZ”类型保存,方便与CAD、Geomagic、3Dmine等软件结合进行后期数据处理.
2 点云数据处理及三维建模过程
2.1 点云数据优化处理
CMS进行完一次空区扫描后,扫描所得数据量通常在数十万之间,对有些大型空区,在扫描精度较高要求下,扫描所得到的数据量达到了数百万之多,尤其在20m范围内扫描时,点云往往过于密集,往往存在着重点、无序点、偏离点等坏点.如不预先优化处理(点云过滤)这些点,这必将在后期点云处理时给计算机运行带来很大的压力,同时也会影响后期的图形质量.鉴于此,结合Geomagic Studio软件论述了对点云数据的优化处理.其流程如图3,描述如下.
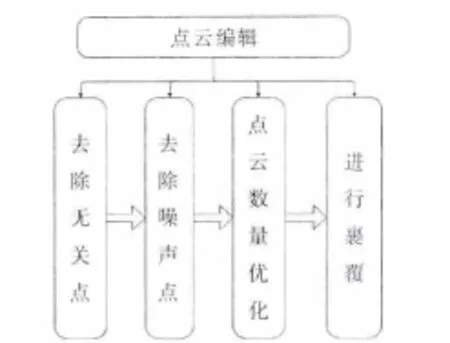
图3 点云数据优化处理流程图
1)点云着色.点击该功能,系统将自动计算点云的法向量,赋予点云颜色,点云着色后,对象出现曲面化视图,这样你可以看出对象的具体形状,能看出较明显的坏点,从而知道应该对点云做何处理,便于点云优化处理.
2)手动删除杂点.对于一些明显偏离扫描体表面的点,这里称为孤立点或者偏离点,可通过人工索套选择这些明显偏离扫描体的点,首先进行手动删除.
3)断开组件连接.点击断开组建连接功能,弹出选择非连接选项的对话框,在“分隔”选择“低”,表示偏离点离扫描体的距离和范围,然后点击确定,退出对话框后按Delete删除选中的非连接点云.该命令可自动探测所有非连接点云,代替手动选择.
4)体外孤点.点击体外孤点功能,弹出体外孤点对话框,将敏感性设置为100,点击应用后确定,按Delete删除选中的红色点云.该命令表示选择任何超出指定移动限制的点,体外孤点功能非常保守,可使用3次达到最佳效果.
5)减少噪音.点击减少噪音功能,该命令有助于减少在扫描中的噪音点使其到最小,更好地表现真实的物体形状.造成噪音点的原因可能是扫描设备轻微震动、物体表面较差、光线变化等.
6)统一采样.该功能是通过人为设定点间距以及曲率优先等相关参数后,软件自动去除因拼接扫描体等产生的重叠点或冗余点,与此同时,再保持扫描体形状不变条件下稀释点云,减小点云数量以减小计算机处理压力.
2.2 点云拼接
对于复杂的空区,为了减少空区遮挡物对激光的遮挡,往往要选择多个架设点对空区进行扫描,再将多次扫描探测的点云数据进行拼接,形成完整的空区点云数据.
由于CMS每次扫描的点云数据都是相对扫描系统自己的坐标系,因此不同的扫描位置获得的点云数据是处在不同的坐标系下,必须将不同坐标系下的点云数据设法置于一个公共坐标系下,从而获取一个完整的空区点云数据.本论文是通过全站仪测定架设在CMS机头上的靶标地理坐标,将其纳入实际矿山坐标系,获得了靶标实际坐标(xi,yi,zi),再通过激光测距仪确定靶标距离CMS激光中心点的偏移位移(Xi,Yi,Zi),则 CMS 中心点的实际坐标(x,y,z)转换公式如下:
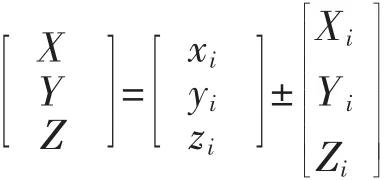
这样就将多次扫描的各点云数据置于公共坐标系下,方便后期建模处理.
2.3 点云数据三维可视化建模
CMS空区扫描的最终目的是建立三维可视化实体模型,建立实体模型是为了掌握空区的基本形态、位置、体积以及与矿体和其他巷道工程的空间位置关系.除了能获得上述这些几何信息外,还可以经过对模型编辑处理获得相关力学信息、建立模型进行稳定性分析以及与采矿有关的经济信息等.
原始数据经过初始处理得到点云坐标后,可采用多种手段生成空区三维模型.运用CAD或 QVOL生成的空区模型是一种 mesh模型,虽然实现了三维建模,但该类模型可视化程度较差、编辑能力弱.用Surpac和Datamine等矿业软件建立的模型虽然可视化强、模型编辑能力强,但在建模过程中的数据转化与验证相对繁琐,且建立的模型精度相对不高.利用逆向工程软件Geomagic建立三维模型时,可直接利用点云数据,省去了数据转换与验证的繁琐环节,同时与CMS自带软件一样能保持很高的精度.
在Geomagic里,调用点云封装功能,软件将自动通过计算将点云数据转换为三角面片,以三角面片将点云封装为一个实体模型.软件拟合的三角面数量随着扫描体的复杂程度而增加,还可以通过设置参数控制拟合的三角面片的质量,一般拟合的三角面片的质量与计算机的运行速度成反比.针对所生成的实体模型,还可以对其进行相关优化处理,如填充孔,用来填充实体中的空洞;网格医生,自动修复多边形网格内的缺陷;简化,用来减少三角形的数量,但不减少曲面的形状和颜色.通过这些优化处理,可以优化模型存在的问题,构建出一个符合要求的模型.
3 应用实例
3.1 项目介绍
福建源鑫矿业公司,多年来由于民采行为使得其379 m水平以上形成了大量的采空区,且开采过程中没有对应的采矿设计图纸,开采过程中见矿就挖,采富弃贫,采空区未进行相应描述及处理.导致该矿379 m水平以上采空区位置及分布特征未知.大规模复杂空区群的存在,严重影响了源鑫矿业公司的正常生产.
1)根据现场勘测结果,工作人员由出矿漏斗口进入空区,采用三脚架操作方式,在空区中架设设备进行空区的三维空间测量.
2)如图4,需要对2#勘探线到5#勘探线之间160m范围内的23个漏斗口的采空区进行采空区扫描.如图4所示,测量范围为2条青色勘探线之间的区域,漏斗口为对角黑白方形所示的位置.
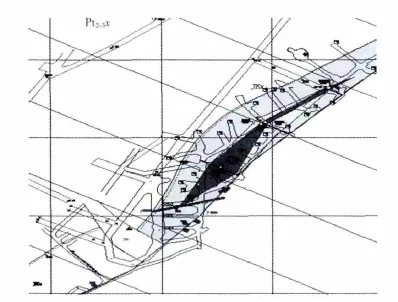
图4 370m中段探测区示意图
3)416 m中段水平:需要对矿区2#勘探线到7#勘探线之间200 m范围内的49个漏斗口的采空区进行采空区扫描.
3.2 原始点云
本次共取得有效的点云数据文件68个,总共大约878万个点云数据,原始点云图见图5.
3.3 简化后的点云
原始点云数量巨大,直接进行建模处理耗费时间,PC机下由于内存的限制,建立不了模型,因此在满足空区扫描精度及基本保持空区形态下,对原始点云数据进行了精简,精简后剩余54万点云数据,见图6,从图6可以看出,基本保持了空区的完整形态.

图5 原始点云图
图6 简化后的点云图
3.4 建模后的结果
对于精简后的点云数据,利用Geomegic生成三角面片模型,手工补充完空洞后,形成DXF文件,导入到3Dmine中,图7为最后形成的空区三维模型.利用Geomagic软件只是较精确间接地建立了三维模型,建立模型的最终目的是通过对其后期处理,分析出所需的信息以指导生产.Geomagic它毕竟不是矿业软件,不能将模型与矿业生产有效联系起来.针对此问题,应用3Dmine矿业软件通过对所建模型编辑处理得出有用信息,用来指导实际生产.其过程是利用Geomagic软件将模型保存为“DXF”类型文件,以便在3Dmine中打开并作进一步的分析应用.
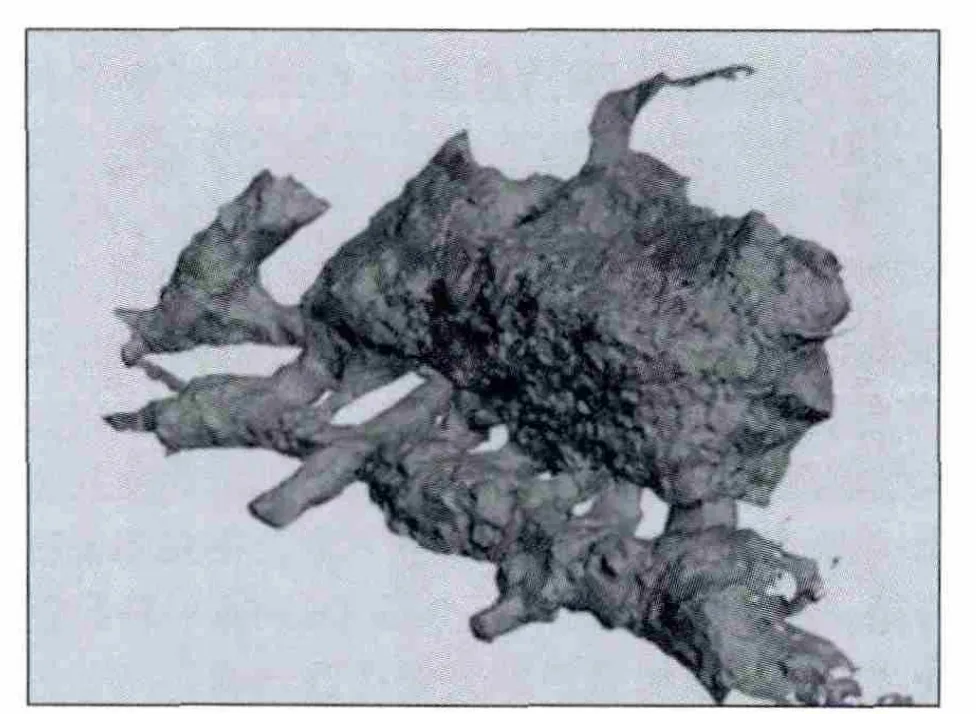
图7 空区三维模型
4 结 论
1)总结了针对空区原始点云的处理过程:点云着色、手动删除杂色点、体外孤点、减少噪音、统一采样,把海量的点云数据进行简化处理,应用实例表明,这套流程针对矿山空区的点云处理建模还是比较可行和有效的.
2)所构建的模型是使用了矿山公共坐标,和已建立好的矿山三维地质模型进行合并,形成了矿山三维可视化开采现状模型.通过此模型掌握空区的基本形态、位置、体积以及与矿体和其他巷道工程的空间位置关系,为矿山安全高效生产提供及时的实时资料,及时为矿山开采设计提供科学依据.此外,还可以利用所获得采空区模型,将其与采场设计模型复合比对,通过剖切等布尔运算,计算出包括采场超挖量、欠挖量、存留矿量和损失贫化率在内的采场回采指标,及时为采场下一步开采优化设计提供科学依据,指导矿山更加高效、安全地生产.
3)由于没有专门用于空区的建模软件,整个建模过程还有些复杂,手工处理过程比较耗费时间,如果有专门的空区点云处理软件,将会极大地提高基于CMS激光扫描空区建模的工作效率及普及程度.
[1]李现区.复杂空区中残留矿体安全开采技术的研究与实践[J].金属矿山,2010(6):30-33.
[2]刘科伟,李夕兵,刘希灵,等.复杂空区群露天开采境界三维可视化及其应用[J].中南大学学报(自然科学版),2011,42(10):3118-3124.
[3]王国焘,罗周全,刘晓明,等.金属矿采空区三维探测及可视化建模与应用[J].中国地质灾害与防治学报, 2010, 21(1):104-109.
[4]杨有喜,孙丽军.某民采矿山空区调查及治理方案研究[J].现代矿业,2013(4):31-33,40.
[5]胡家国,马海涛.铁矿采空区处理方案研究[J].中国安全生产科学技术,2010,6(5):67-70.
[6]周科平,雷涛.复杂空区群条件下碎裂残矿资源回收技术研究[J].有色金属科学与工程,2012,3(3):1-5.
[7]章林,孙国权,李同鹏,等.地下矿山采空区探测及综合治理研究与应用[J].金属矿山,2013(11):1-4.
[8]孙建军,陈凯,刘晓非,等.金厂峪浅部复杂空区群的综合探测方法[J].有色金属(矿山部分),2013,65(6):1-5.
[9]过江,罗周全,邓建,等.三维动态空区监测系统CMS在矿山的应用[J].地下空间与工程学报,2005,1(7):994-996.
[10]刘晓明.基于实测区的三维建模及其衍生技术的研究与应用[D].长沙:中南大学,2007.
[11]夏永华,方源敏,孙宏生,等.3D激光探测系统在采空区测量中的精度评价[J].有色金属(矿山部分),2009,61(4):55-58.
[12]徐森民.Surpac软件在露天矿复杂空区三维模型建立中的应用[J].有色金属(矿山部分),2012,64(6):79-82.
[13]罗周全,杨彪,刘晓明,等.基于CMS实测及Midas-FLAC3D耦合的复杂空区群稳定性分析[J].矿冶工程,2010,30(6):1-5.
猜你喜欢
交通世界(2022年27期)2022-10-17
世界科学技术-中医药现代化(2022年3期)2022-08-22
北京测绘(2022年6期)2022-08-01
有色金属(矿山部分)(2022年2期)2022-07-13
师道·教研(2022年1期)2022-03-12
资源信息与工程(2021年5期)2022-01-15
新疆钢铁(2021年1期)2021-10-14
神剑(2021年3期)2021-08-14
北京测绘(2021年7期)2021-07-28
昆钢科技(2021年2期)2021-07-22
