
基于ANSYS的悬臂堆料机行走机构选型设计及优化
2015-05-14 08:33邵翠荣牛军燕
机械工程师 2015年10期
邵翠荣, 牛军燕
(华电郑州机械设计研究院有限公司,郑州 450015)
0 引言
悬臂堆料机在我国水泥、大型钢铁联合企业、冶金及发电企业中得到了广泛的应用。堆料机主要由悬臂胶带机、尾车、机架、卷扬机构和行走机构等组成。而行走机构承载了堆料机的绝大部分重量和悬臂胶带机产生的侧向力,所以,如何在满足强度、刚度、安全性、稳定性的条件下,减轻行走机构的重量的研究至关重要。本文针对徐矿集团哈密能源公司大南湖矿区选煤厂输煤系统的堆料机行走机构为例,利用ANSYS有限元分析软件,建立了SHELL63弹性壳单元模型[1],分析在多载荷共同作用下结构应力应变情况,并在有限元计算结果基础上对其进行了选型设计和优化分析。通过分析计算,不仅缩短设计周期,而且保证行走机构的安全可靠,为后续堆料机系列化生产或者新产品开发设计提供参考。
1 悬臂堆料机结构原理
悬臂堆料机主要由悬臂胶带机、尾车、机架、卷扬机构、行走机构组成。其工作原理就是物料通过尾车上的进料皮带机输送到悬臂胶带机上,然后通过行走机构在条形料场的往复运动将物料均匀地散布在料场内。本次主要针对行走机构在强度、刚度等方面进行选型的优化设计。行走机构正上面承载了机架、悬臂胶带机、卷扬机构、各辅助机构的全部竖向力,侧面则承受悬臂胶带机产生的较大的侧向力。经过结构分析和前期计算,行走机构上承受的竖向力主要是机架传递给行走机构的竖向压力和卷扬支撑施加给行走机构的竖向分力,两处分别为387 600N,而侧向力主要是机架传递给行走机构的水平分力和卷扬机构施加给行走机构水平分力,左侧为414 700N,右侧为314 700N。
2 ANSYS软件在行走机构选型及设计中的应用
本文将在ANSYS软件中直接建模并分析,将有效缩短开发设计周期[2]。本次设计的行走机构由箱型梁组成,一般的箱型梁结构在有限元建模中可以采用Beam188单元。但是,本次设计的行走机构虽然由箱型梁组成,但是由于本身承载的竖向力和水平力较大,故在箱型梁内部关键的受力部位做加筋处理。为了使ANSYS中建的模型与实际模型更接近及分析的结果更准确,本次分析采用Shell63板壳单元,更具体地把箱型梁的每块板材及每块筋板都进行建模,以便使得出的结论更具有可靠性。
2.1 分析过程
ANSYS可以直接读取Pro/E生成的几何实体,将三维模型导入后进行有限元分析。但是本次主要作为选型计算,故在ANSYS中直接建模更便于后期的优化分析。建立三维模型时应保证虚拟模型和实际模型尽可能一致,特别是工况一定要符合实际情况,以使受力分析能够符合实际的受力情况,在这个原则下再对模型做适当的简化。
2.2 前处理过程
设置ANSYS模版,选择分析类型,定义材料、属性、实常数卡等准备建模。其中查机械设计手册[3]得,235钢屈服强度σs=235 MPa,安全系数取1.5,材料参数为:弹性模量E=1.07×105MPa,泊松比 λ=0.3,密度 ρ=7.8×10-6kg/mm3。
利用Shell63壳单元建立模型。根据需要及在关键的受力部位加筋方案确定了80个关键点,这里不再一一指出。然后选择各段的截面序号,将各个关键点连接起来生成面,然后再给面赋予面单元属性。本次初步设计箱型梁的上下翼缘板采用δ=20 mm,两侧的腹板采用 δ=16 mm,所有筋板采用δ=12 mm。在ANSYS中建成的三维模型划分网格后如图1所示。
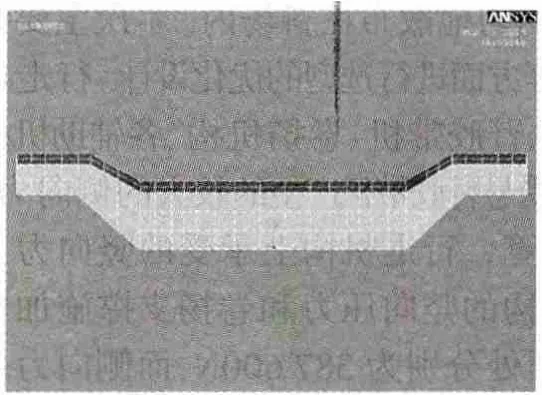
图1 行走结构网格图
2.3 后处理过程
1)添加约束。由于悬臂堆料机行走结构采用4个承载车轮,左右各2个车轮支撑在行走机构两侧,其中左右分别有一个车轮为主动轮,左右同步单轮驱动,而车轮支架和行走机构底面为面接触,故约束的部位即车轮支架和行走机构底面接触的面约束。
2)施加载荷。行走机构的自重可以通过Loads>Define loads>Inertia>Gravity>Global添加;其他的载荷为:箱型梁侧面与卷扬机构接触的两处面压力分别为387600/(1525×925)≈0.27 N/mm2,箱型梁上面与机架接触的面压力,左侧为414700/(630×500)≈1.32 N/mm2,右侧为314700/(630×500)≈0.99 N/mm2。

图2 优化前行走机构应力云图
2.4 分析结果
Solve运行分析后得到应力应变云图,优化前行走机构应力云图如图2所示,应变云图如图3所示。
由图2可知,这种选型在实际载荷下的最大应力为 166.158 MPa,而[δ]=235/1.5=156.67 MPa,最大应力超过了该材料的许用应力,并且最大应力出现的位置在行走机构承受卷扬支撑的侧面上,说明箱型梁的腹板初步选型不能满足应力要求。由图3可知,最大应变量为2.41 mm,而该结构相应的许用挠度为7832/800=9.79 mm,最大变形量没有超过许用挠度。初步分析该选型刚度满足要求,强度稍微有点薄弱,所以需要进行优化分析。

图3 优化前行走机构应变云图
3 优化过程
根据图2可以看出受力薄弱的部位在腹板上,所以优化方案是将和卷扬机构接触的腹板的厚度从δ=16 mm变成δ=18mm。打开ANSYS建模模块,在RealConstants把腹板的厚度改成18mm,将相对应的尺寸参数更改后保存,然后重新运行求解。优化后的皮带机架应力云图如图4所示,应变云图如图5所示。
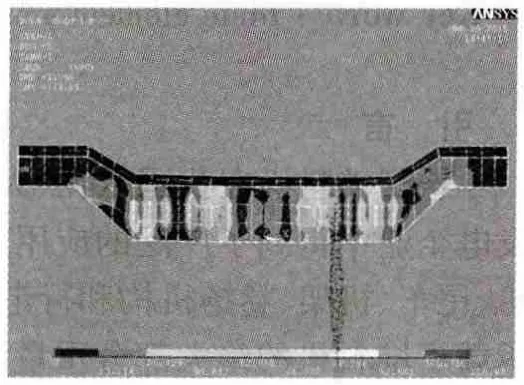
图4 优化后行走机构应力云图

图5 优化后行走机构应变云图
由图4可知,这种选型在实际载荷下的最大应力为118.93 MPa,小于该材料的许用应力;由图5可知,最大变形量为1.796 mm,小于该结构相应的许用挠度,故此时安全可靠。该方法大大提高了工作效率及选型的准确性,值得在设计中推广应用。
4 结语
通过该实例可以看出,本文采用Shell63壳单元更详细地建模,能够使模型更接近实际,得出的应力应变值更准确。这种方法不仅可用在行走机构的选型设计上,还可为其他钢结构的选型设计提供参考。
[1] 博弈创作室.ANSYS经典产品基础教程与实例详解[M].北京:中国水利水电出版社,2006.
[2] 周宁.ANSYS机械工程应用实例[M].北京:中国水利水电出版社,2006.
[3] 成大先.机械设计手册[M].5版.北京:化学工业出版社,2007.
猜你喜欢
陕西煤炭(2022年6期)2022-12-20
中国建筑金属结构(2022年1期)2022-03-05
机械管理开发(2020年4期)2020-06-10
经济技术协作信息(2018年22期)2019-01-19
世界有色金属(2018年14期)2018-10-10
港口装卸(2016年4期)2016-09-08
西南交通大学学报(2016年4期)2016-06-15
有色冶金设计与研究(2015年5期)2015-05-15
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
中国新技术新产品(2014年5期)2014-07-30
