
城市轨道交通工程测量数据处理系统的设计与实现
2015-06-28 06:15梁爽王玉福李鹏马全明高俊
城市勘测 2015年4期
梁爽,王玉福,李鹏,马全明,高俊
(1.北京城建勘测设计研究院有限责任公司,北京 100101;2.东莞市轨道交通有限公司,广东 东莞 523000)
1 引 言
目前轨道交通行业内大部分针对轨道交通线路工程测量的内业数据处理计算的方法,一是采用计算器人工计算,二是通过CAD 图上拟合量取,三是采用诸如Excel 等进行二次开发的简易程序进行计算等其他一些方法。这些计算方法在实际运用中均可操作,但是缺乏统一的操作标准,比较分散且操作步骤复杂,对于原始数据的读入格式也各种各样,容易导致计算结果出现错误等问题。针对存在的问题,本文结合整个轨道交通工程测量的特点,以Visual C++6.0 为可视化开发平台,从底层进行类的定义以及代码编写,开发出工程测量数据处理8 大模块,不仅统一了数据读入格式,简化了数据处理的操作程序,而且在重大测量数据处理模块中提供了多种复核计算程序,从而达到了数据处理速度快,数据处理结果可信度高的效果,希望对国内同行在轨道交通工程测量数据处理方面提供一些借鉴和参考。
2 总体设计思路
2.1 数据格式设计
城市轨道交通工程测量数据处理系统关于数据格式的设计,主要是针对海量三维坐标数据,一是要尽量符合目前主流的测量仪器的输出格式,主要是全站仪的内存海量坐标点位数据,包括点号,Y,X,H 数值;二是要统一定义整个系统的输入数据格式,数据的排列要规范易操作,尽量按照测量仪器输出后简易修改或者不修改便可以进行数据的读入;三是读入数据的文件大小要控制在合理范围内,不影响数据的读入速度。基于以上三点,作者选择文本格式(.txt)作为最终的读入数据格式。具体的读入数据格式如表1 所示。
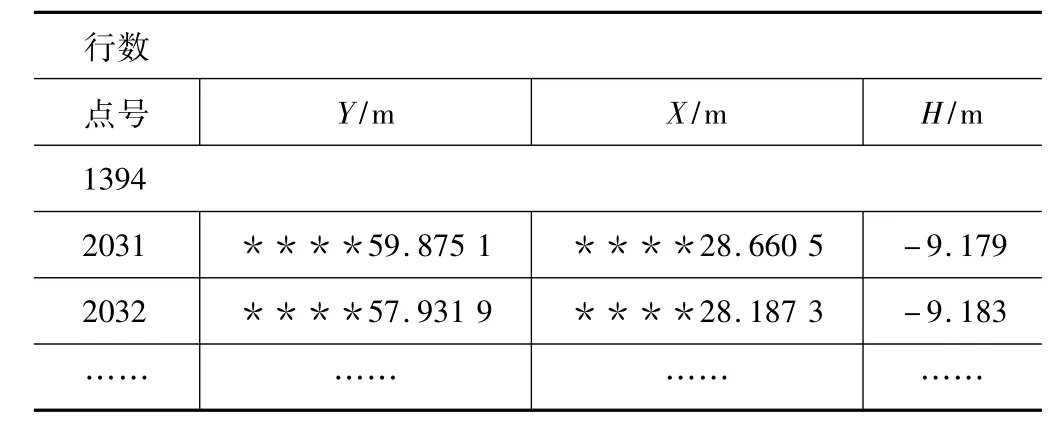
数据读入格式 表1
2.2 流程设计
城市轨道交通工程测量数据处理系统设计的流程包括系统的功能模块、数据处理的关键算法以及系统的界面设计。将测量仪器中的原始数据按照设计读入格式排列好,选择相应的数据处理模块,读入数据,完成数据的处理过程并生成平差报告,根据报告中的精度结果,如果满足精度要求,保存平差报告并按要求输出成果,否则检查读入数据,重新输入并处理。在这里需要强调的是,部分重大测量数据处理模块提供了多种算法进行数据处理,用户可以选择不同算法进行验证,确保数据成果的可靠,具体的系统流程设计如图1所示。
2.3 功能划分
针对城市轨道交通工程测量的实际特点,将涉及的测量数据处理主要划分为盾构管片姿态测量、盾构机姿态测量、联系测量、线路(隧道)中心线计算、多点拟合圆(球)心、坐标系转换、断面测量数据处理、坐标正反算,选择相应的模块以后,会弹出子模块,分别对应着不同的算法,用户可根据选择相应的模块进行处理验算。另外,系统界面上还有用户注册、使用说明、退出等附加功能供选择使用。
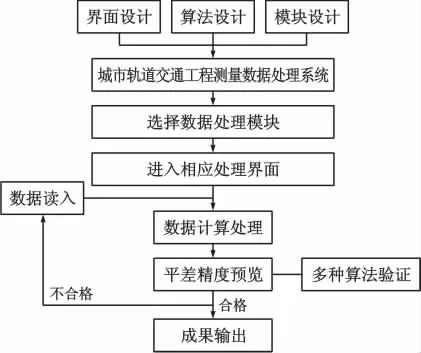
图1 系统流程设计
3 关键算法实现
城市轨道交通工程测量数据处理系统的功能模块设计根据功能划分为8 大处理模块,具体界面及功能设计如图2 所示。由于篇幅所限,下面主要对系统里两个较为关键的功能模块算法进行分析说明。

图2 城市轨道交通工程测量数据处理系统主界面
3.1 盾构机人工姿态计算
假设两个直角坐标系,其中O-XYZ 为施工坐标系,O'-X'Y'Z'为盾构局域坐标系,如图3 所示。
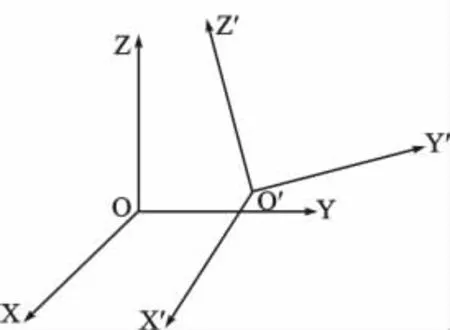
图3 施工坐标系和盾构局域坐标系示意图
设点A 在空间直角坐标系O-XYZ 中的坐标为(X,Y,Z),在空间直角坐标系O'-X'Y'Z'中的坐标为(X',Y',Z')。X'轴在O-XYZ 中的方向余弦为(a1,b1,c1),Y'轴在O-XYZ 中的方向余弦为(a2,b2,c2),Z'轴在O-XYZ 中的方向余弦为(a3,b3,c3);而X 轴在O'-X'Y'Z'中的方向余弦为(a1,a2,a3),Y 轴在O'-X'Y'Z'中的方向余弦为(b1,b2,b3),Z 轴O'-X'Y'Z'中的方向余弦为(c1,c2,c3),μ 为尺度比,(X0,Y0,Z0)为O'-X'Y'Z'的原点相对于O-XYZ 原点的平移量。两套坐标的关系用矩阵表示为:
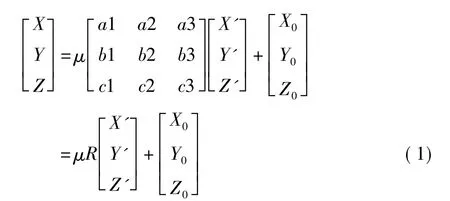
旋转矩阵R 是正交矩阵,存在下列条件:
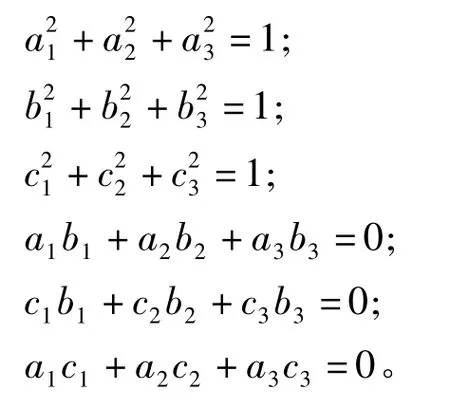
根据式(1)和上述的6 个条件方程,采用附有条件的参数平差方法可以方便的求出3 个平移参数(X0,Y0,Z0),9 个旋转参数(a1,a2,a3,b1,b2,b3,c1,c2,c3)和一个比例参数μ,然后利用计算得到的13 个参数和盾头、盾尾中心点在盾构机局域坐标系中的三维坐标,代入式(1),就可以方便的计算出盾构机头和盾尾中心点在施工坐标系中的三维坐标,再与设计轴线进行比较可以方便的求出盾构机实时的姿态。
3.2 独立坐标系转换
局域范围内的两个独立三维直角坐标系,可以采用盾构人工姿态的算法,即采用13 参数法,利用两个直角坐标系中的公共点,采用附有条件的参数平差方法求得转换的13 参数,然后利用13 参数求得所求点在待求坐标系中的坐标。
同样,也可以直接采用长度一致的方法利用参数平差的方法直接求得待求点在待求坐标系中的坐标。因两个直角坐标系中的公共点在每个坐标系中的相对位置关系不变,则待求点在每个坐标系中到各公共点的长度相等,假设n 个公共点在已知坐标系中的坐标为(Xi,Yi,Zi),在待求坐标系中的坐标为(xi,yi,zi)其中n=1,2,…,n,待求点在已知坐标系中的坐标为(xo,yo,zo),在待求坐标系中的坐标为(x,y,z),则有下式:

分别将各公共点坐标代入上式中,利用参数平差的方法直接求得待求点在待求坐标系中的坐标(x,y,z)。
4 工程应用实例
本数据处理系统在东莞城市快速轨道交通R2 线工程测量中进行了实际应用,笔者选择某区间标段工程测量为实例,以关键节点的测量数据为依托,对系统的数据处理能力进行验证。例如某区间盾构掘进过程中,在盾构停机维护期间,外业对盾构机的参考点进行实际测量,选择系统的盾构机姿态计算模块,进行数据处理,输出成果报告及平差结果如表2、表3 所示。
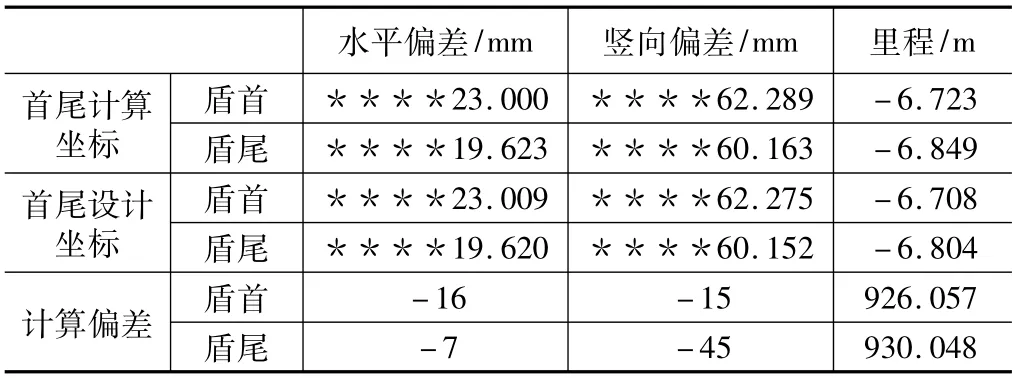
盾构机人工姿态测量成果表 表2
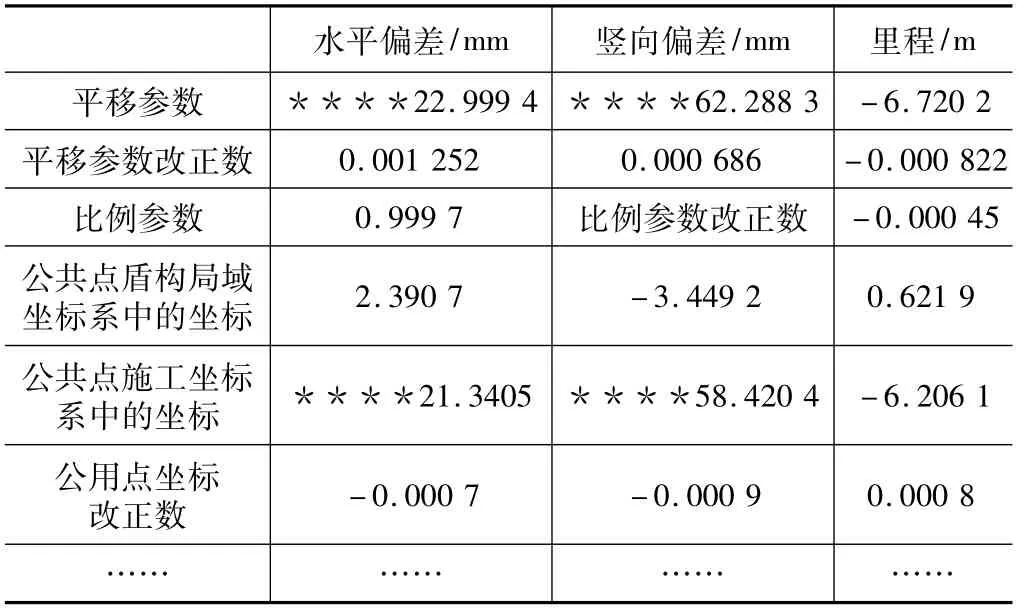
盾构机人工姿态平差表 表3
我们可以根据改正数的大小,来判断在现场采集数据的精度。同时可以进行粗差剔除,对于改正数较大的点剔除后重新计算,计算出更为可靠的结果。由于篇幅有限,上述表格中只提供了部分数据。经过多种方法的计算、并与现场盾构机操控室电脑数据进行对比,盾构机姿态测量的数据处理完全满足施工要求。
本系统对海量断面测量的数据处理也取得了良好的应用效果。同样以东莞R2 线工程某盾构区间为例,在完成隧道贯通后,按照设计单位断面测量技术要求,每个断面测量10 个点位的三维坐标数据,存储于全站仪中。内业对海量的断面点位数据进行统一编辑,以文本格式存储,选择系统的断面测量模块中的圆形断面程序,进行快速批量处理,几分钟之内便可完成数据处理,并生成断面数据成果表,如表4 所示。
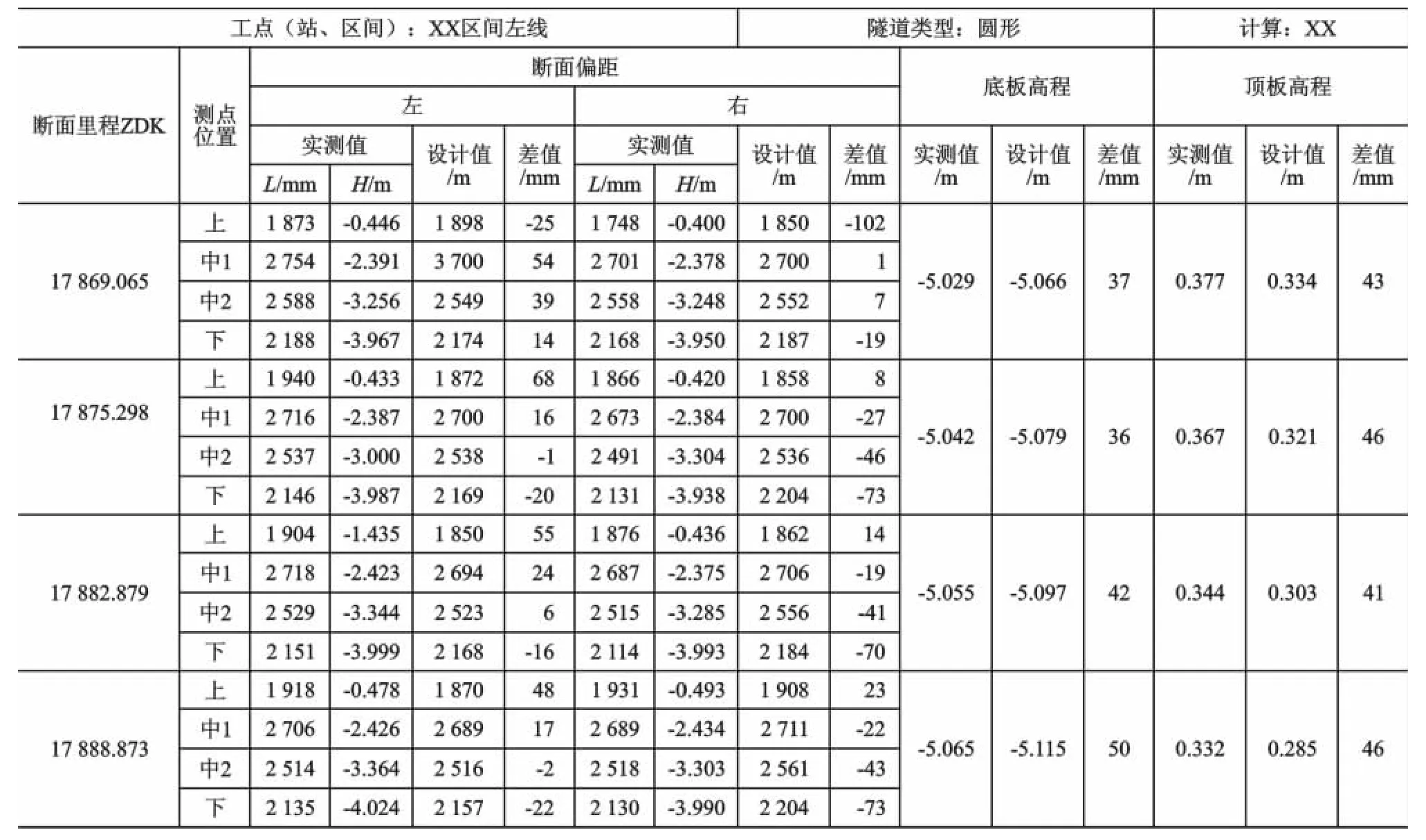
盾构圆形隧道断面数据成果表 表4
笔者还采用了广州、深圳、北京等多地的轨道交通工程测量实测数据,对本测量数据系统的各个模块分别进行了大量的计算验证,由于数据众多,文章中就不一一列举了。测量数据的处理结果都很好的符合了工程实际,满足了施工要求。
5 结 语
笔者完成系统开发以后,经过实际验证,取得了较好的效果,本系统有以下几个方面的特点:
(1)本文主要从城市轨道交通工程测量的实际出发,考虑到目前行业内没有一套综合全面的测量数据处理系统,本系统采用Visual C++ 6.0 开发,从底层进行类的定义以及代码编写,在Windows 环境下运行,用户界面形象直观,易学易用,在软件使用上已经具有良好的推广应用前景。
(2)首次将轨道交通工程盾构施工过程中相关的测量计算进行了系统的集成开发,根据盾构施工的实际特点,从盾构始发前的隧道中线数据计算,盾构始发的姿态检查计算,洞门中心定位安装,到掘进过程中的管片姿态偏差计算,从盾构始发井施工放样期间的坐标正反算、施工坐标系与局域坐标系的转换到盾构后期竣工的断面净空测量,涵盖了目前轨道交通工程盾构施工期间所有的相关步骤,具有较强的系统性和普遍适用性。
(3)盾构施工测量系统中的盾构机人工姿态数据处理技术,计算方法灵活,适用性强,能够在盾构机导向系统出现故障的情况下,快速准确地判断出盾构机实际姿态。该模块针对目前主流的盾构机,针对主动铰接和被动铰接不同的盾构机形式以及盾构机刚体上有无厂商提供的参考点数据,均提供了系统多样的计算模块,并且自动进行改正计算,方便测量工作者剔除外业中错误的点位数据,确保盾构施工的测量安全。
[1]陈能,江男,王梅珍.城市轨道交通基础地理信息系统的设计与实现[J].城市轨道交通研究,2006(10).
[2]秦长利.城市轨道交通工程测量[M].北京:中国建筑工业出版社,2008.
[3]马全明.伊朗德黑兰地铁一、二号线工程断面测量的技术方法[C].现代工程测量技术发展与应用研讨交流会论文集,2005.
[4]宋力杰.测量平差程序设计[M].北京:国防工业出版社,2009.
[5]王玉福.人工测量盾构机姿态的模型研究[J].城市建设,2011(2).
[6]王思锴.城市轨道交通工程隧道结构断面测量技术方法的实践与探索[J].城市勘测,2011(2).
猜你喜欢
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
水泵技术(2021年3期)2021-08-14
建材发展导向(2021年11期)2021-07-28
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国房地产业(2016年9期)2016-03-01
中国惯性技术学报(2015年1期)2015-12-19
中国工程咨询(2015年9期)2015-02-25
