
北斗卫星导航系统在工程测量中的研究与应用
2015-06-28 06:14郭桂川
城市勘测 2015年1期
郭桂川
(中铁建工集团有限公司北京分公司,北京 100070)
1 引 言
中国自主发展,独立运行的北斗卫星导航系统(BeiDou)计划到2020年共发射5 颗静止轨道卫星和30 颗非静止轨道卫星,从而实现覆盖全球的北斗卫星导航系统。目前,北斗卫星系统已经发射了16 颗卫星(5 颗IGSO 卫星,5 颗MEO 卫星和6 颗GEO 卫星),具备了亚太地区的定位,导航和授时以及短报文通信服务能力。随着北斗卫星导航系统的发展,北斗卫星定位在国防与工程测量中的应用也越来越广泛,同时对北斗卫星系统与GPS(美国全球定位系统)的兼容与互操作性的研究也将变得越来越重要。多系统的卫星定位不仅增加了可用卫星的数量,同时也提高了定位精度以及定位的可靠性[1]。
鉴于卫星定位在工程测量中的广泛应用,研究北斗卫星系统的定位结果具有很重要的参考与指导意义,尤其是与GPS 的定位结果的比较和两个系统组合的定位结果的分析。因此,本文建立了适合与多系统组合单点定位的数学模型和随机模型。通过实测的两组不同地点的,长时间的北斗和GPS 数据,首先比较了北斗和GPS 单独单点定位的结果,然后分析了两个系统组合之后的单点定位结果。结果显示,北斗卫星系统单点定位的结果与美国GPS 单点定位的结果在亚太地区很接近,在一般的观测情况下,静态的定位结果水平方向上基本稳定在5 m左右,高程方向稳定在10 m左右。而两个系统组合则可以增加卫星数量,改善定位精度,提高定位的可靠性,特别适合遮挡比较严重的环境单系统卫星定位不足的情况。
2 单点定位的基本模型及参数估计
随着全球导航卫星系统(GNSS)技术的发展,目前已经有许多种定位方式来满足各种各样的测量,导航需求,例如单点定位,差分定位,RTK 等。其中单点定位是相对来说最简单,快速,有效的可以达到5 m左右精度的定位方法,因此广泛引用于工程测量,车载导航等领域。
2.1 建立数学模型
单点定位的数学模型可以建立如下[2,3]:

式中:P 表示伪距观测值;ρ 表示卫星到接收机之间的几何距离;tr+t5分别表示接收机钟差和卫星钟差;c 表示光速;T 和I 分别表示对流层延迟和电离层延迟。v 为观测误差,本文认为多路径延迟也归到观测误差里面。由式(1)可以得出,除了接收机和卫星自身的钟差,单点定位的结果受对流层和电离层的影响较大。在实际应用中,一般可以采用模型进行改正,本文采用比较常用的对流层改正模型霍普菲尔德(Hopfield)模型和电离层模型克罗布歇(Klobuchar)模型[2,3]。
一般情况下需要给出一个接收机的初始坐标X0将式(1)进行线性化,从而可以将式(1)进一步推导为:

式(2)的左边l 为观测值减去已知值,其中ρ0表示由初始坐标计算的卫星与接收机之间的距离。A=[AcE]和x=[xctr]T分别表示设计矩阵和未知数向量。Ac和xc分别表示线性化后的坐标设计矩阵坐标增量。E 表示钟差的系数单位矩阵。
式(2)是针对单系统的单点定位而建立的模型,随着GNSS 的发展,多系统的卫星定位显得越来越重要。考虑到不同系统具有不同的时间参考系统,因此北斗和GPS 组合定位的模型需要加上一个(北斗基于GPS 或者GPS 基于北斗的)时间系统偏差进行估计,或者建模时北斗系统的钟差和GPS 系统的钟差分开建立。类似的,在北斗和其他系统(如Galileo,GLONASS)等系统组合定位时也需要加上一个时间系统偏差或者增加一个钟差未知数。
相应的,需要建立适当的随机模型来描述观测值的精度,如下:

式中,D 和σ2表示观测方差阵和先验方差(本文设为1 m);Q 和P 表示方差系数阵和权阵;a 和b 为经验值,本文取0.3,sin(el)为高度角求正弦值。
2.2 参数估计
参数估计可以采用最小二乘估计或者卡尔曼滤波估计两种方式。对于单历元求解的单点定位来说,两者估计的原理和结果基本一致。由式(1)和(3),可以根据最小二乘估计的准则(VTPV=min),得出未知数向量的增量估计和方差阵如下[4]:

在实际的定位过程中,一般情况下需要加上粗差检测来剔除观测误差比较大的卫星。本文采用了比如常用粗差探测法来剔除观测质量差的卫星,具体实现过程可参考文献[5]。
3 定位结果分析
为了测试北斗单点定位的效果,与GPS 单点定位的结果进行比较以及分析两个系统组合定位的结果,我们在北京采集了两组位于不同地点的静态数据。第一组数据时长为15 h15 min,观测条件良好。第二组数据时长为41 h27 min,周围有少许高楼遮挡,观测条件稍差。所有采集的数据都包含了北斗和GPS 卫星。通过采用修改后的开源GNSS 数据处理软件RTKLIB[6],对这两组数据进行了处理分析。
3.1 单系统定位结果分析
两组数据所采用的北斗卫星数和GPS 卫星数分别如图1 和图2。数据1 中,北斗和GPS 卫星的数量都在8 颗~12 颗。因组合前后的粗差探测阈值选取(跟自由度相关)不同,两个系统组合后的卫星有时候并不一定等于单系统所用卫星之和。数据2 中北斗卫星的数量在5 颗~12 颗之间,而GPS 的卫星数则在7颗~12 颗之间。从图1 和图2 都可以看出,北斗和GPS 的系统组合可以使卫星数最高达到23 颗,显著提高了可用卫星数量。这种多系统组合定位可以改善定位效果,特别适合于有遮挡环境下单系统卫星数不足的情况。
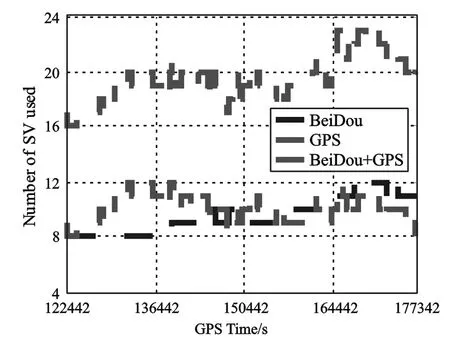
图1 单点定位所用的卫星数(数据1)
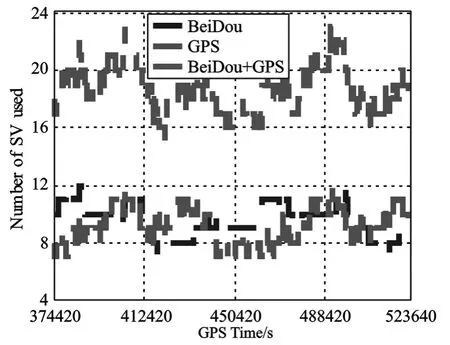
图2 单点定位所用的卫星数(数据2)
图3 和图4 显示了第一组数据的单独的北斗系统和GPS 系统单点定位的结果与真实的坐标值之间的差。注意图中纵轴单位为m。从第一组数据可以看出,北斗系统在纬度方向上定位偏差为2.0 m,比GPS的1.2 m要差,但是经度方向上的1.4 m 比GPS 的2.7 m要好。无论经度和纬度两个系统在水平方向上都稳定在3 m以内。而高程方面两个系统都比水平方面差些,不过也基本在5 m 以内(分别为4.9 m 和4.8 m)。
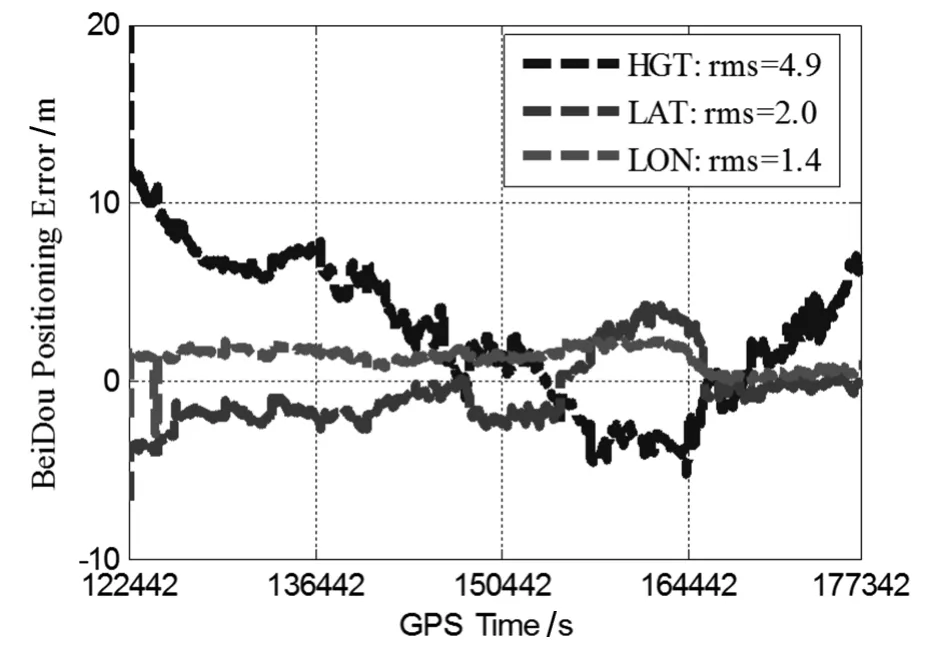
图3 北斗单点定位结果(数据1)
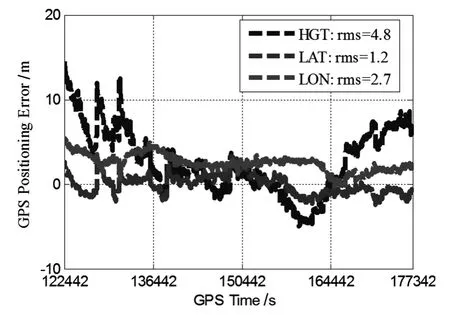
图4 GPS 单点定位结果(数据1)
图5 和图6 给出了第二组数据的单系统的定位结果。可以看出,与第一组数据相比较,第二组数据的定位结果稍微差些。在卫星数相当的情况下,原因是由于数据2 周围的多路径误差比较明显。单北斗的定位结果水平方向上为4.6 m(纬度)和1.5 m(经度),高程定位偏差为9.3 m。而GPS 系统在水平方向上为5.7 m(纬度)和1.9 m(经度),在高程方向上的定位精度为8.0 m。

图5 北斗单点定位结果(数据2)
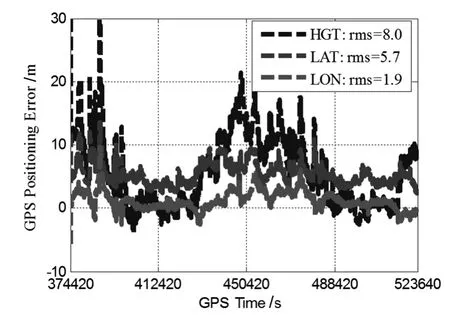
图6 GPS 单点定位结果(数据2)
通过分析这两组数据单系统的定位结果,可以得出北斗系统单独定位的结果与GPS 单独定位的结果类似,观测条件好的情况下水平定位结果在2.5 m左右,高程定位结果在5 m左右。而在观测条件差的情况下水平定位结果在6 m左右,高程定位结果在10 m左右。
3.2 多系统定位结果分析
多系统的定位模型需要考虑不同系统所具有的不同的时间参考系统,因此本文在处理多系统时各自系统的接收机的钟差进行估计,相当于增加了一个钟差未知数。
图7 显示了数据1 的北斗和GPS 组合定位结果。可以看出,与单北斗系统或者单GPS 系统相比,定位结果稳定平滑,有小幅度的改善。在水平方向上精度为0.8 m(纬度)和2.3 m(经度),在高程方向上为4.2 m。从表1 可以得出,多系统定位在纬度和高程方向上都有明显改善,而经度方向上由于GPS 定位结果较差,多系统的定位结果优于GPS 但是没有北斗定位好。
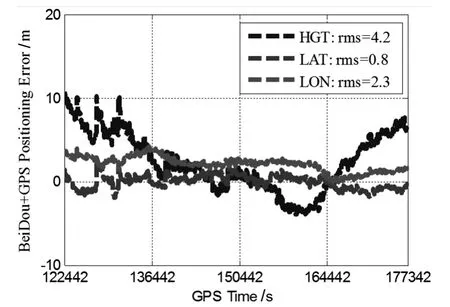
图7 北斗+GPS 单点定位结果(数据1)
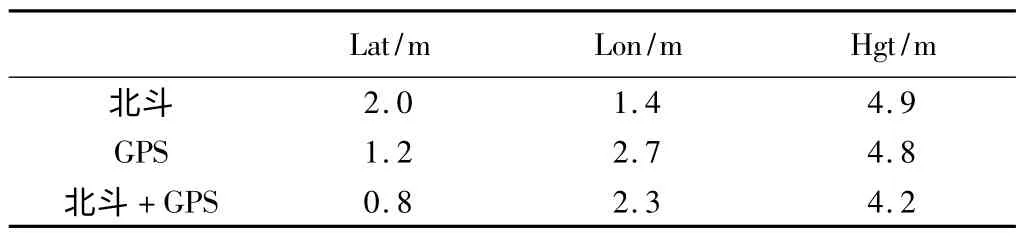
多系统与单系统的定位结果比较(数据1) 表1
图8 给出了数据2 的北斗和GPS 系统组合定位结果。与数据1 的结果类似,组合后的定位结果比较平滑稳定,说明了多系统的卫星定位不仅提高了观测卫星数和定位结果,同时也提高了定位结果的可靠性。从表2 得出组合后的定位结果水平方向上为5.5 m(纬度)和1.4 m(经度),高程为7.8 m。经度和高程都优于单系统的定位结果。纬度方向比GPS 要好,但是略差于北斗。
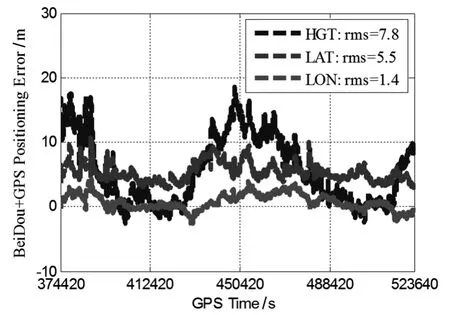
图8 北斗+GPS 单点定位结果(数据2)
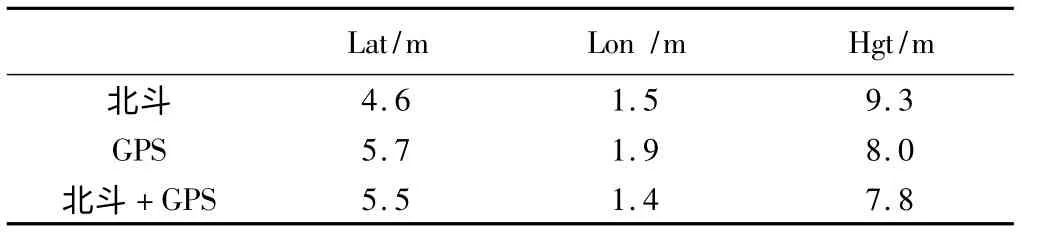
多系统与单系统的定位结果比较(数据2) 表2
通过图7 和图8 可以得出,两个系统的组合对最终的定位结果的改善并不是很大,但是增加了卫星观测数量,从一定程度上提高了定位结果的可靠性,特别是在观测条件差,对于单系统卫星数少的情况下。
4 结论与展望
本文分析比较了北斗卫星导航定位系统和GPS 单点定位的结果。通过处理实测数据可以得出,单系统的北斗单点定位结果与GPS 的定位结果类似,在亚太地区基本可以替代GPS 卫星系统。在观测条件良好的情况下水平定位结果基本在3 m左右,满足一些工程测量的应用。同时,通过建立多系统导航定位的模型,分析比较了单系统和多系统的定位结果。结果显示,多系统的定位结果在观测条件良好的情况下水平方向上为2.5 m左右,略优于单系统的定位结果。同时多系统的定位结果与单系统定位结果相比更加平滑可靠。因此北斗系统和GPS 系统的组合应用前景将更加广泛。
[1]中国卫星导航系统管理办公室.北斗卫星导航系统空间信号借口控制文件[Z].北京:2013,12.
[2]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.
[3]谢钢.GPS 原理与接收机设计[M].北京:电子工业出版社,2009,423.
[4]LI,T.,Wang,J.Some remarks on GNSS integer ambiguity validation methods.Survey Review,2012,230~238.
[5]Baarda,W.A testing procedure for use in geodetic networks.Geodesy,2(5).Netherlands Geodetic Commission,Delft,1968.
[6]Takasu,T.,Yasuda,A.Development of the Low-Cost RTK-GPS Receiver with an open source program package RTKLIB.Proceedings of the International Symposium on GPS/GNSS.Korea,Jeju,2009,4~6.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
小哥白尼(神奇星球)(2022年3期)2022-06-06
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
当代陕西(2019年18期)2019-10-17
导航定位学报(2018年3期)2018-09-03
载人航天(2016年4期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
