
基于Pro/E和ADAMS的绝缘子带电干冰清洗机器人的运动仿真分析
2015-07-07 07:06孙景福唐术锋李华雷
制造业自动化 2015年7期
孙景福,唐术锋,李华雷
(1.内蒙古工业大学 机械学院,呼和浩特 010051;2.内蒙古电力科学研究院,呼和浩特 010020)
0 引言
随着社会经济的迅速发展,大气中的污染物种类越来越复杂,污染程度也越来越高,污秽的产生对电力系统的安全运行造成了极大的威胁[1]。绝缘子带电干冰清洗作业是保证电力系统能安全、可靠运行的重要环节,其清洗效果直接影响到设备的维修和运行型。因此,本文从绝缘子清洗效果和环保的方向出发,以带电干冰清洗机器人为研究对象,采用Pro/E技术对该机器人进行三维模型样机的建立,结合仿真软件ADAMS综合对其进行运动学仿真分析。
1 绝缘子带电干冰清洗机器人运动学分析
应用机器人运动学求解常用方法D-H法[2],此方法计算起来比较复杂,为了增强机器人整体刚性,提高控制精度及其稳定性,该机器人采用平行四边形连杆结构,为了便于对并联部分的运动进行分析求解,设置一个固定坐标系XOY,随平行四边形部分绕腰部一起转动[3,4],如图1所示,为绝缘子带电干冰清洗机器人运动机构简图。

图1 绝缘子带电干冰清洗机器人运动机构简图
1)正求解计算
机械臂部分由开始位置运动图示位置时,大臂l1与X轴的夹角为α,连杆l2与X轴的夹角为β,O点坐标为(0, 0),C点坐标为(X1, Y1),D点坐标(X2,Y2),E点坐标为(X,Y)。
如以上机构简图,RtΔOCG中则C点坐标为:

在RtΔCFD中则D点坐标为:

由式(1)、式(2)可得工具末端E点的坐标为:

把l1=1285mm,l2=230mm,l3=1310mm,l4=375mm带入式(3)可得:

2)逆求解计算
逆求解计算是已知工具末端E点的坐标,然后来得到大臂与X轴的夹角α,连杆与X轴的夹角β,已知E点坐标可得到D点的坐标,即:

如图1所示,在ΔOCD中,

同理可得:

综上式(5)、式(6)和式(7)可得:

把l1=1285mm,l2=230mm,l3=1310mm,l4=375mm带入式(8)可得:

2 基于Pro/E绝缘子带电干冰清洗机器人的三维模型的建立
利用ADAMS进行三维实体建模比较困难,这里借助Pro/E 5.0软件对绝缘子带电干冰清洗机器人各个零件进行三维实体建模,然后再导入到ADAMS中进行仿真分析[5]。
首先借助Pro/E 5.0软件,利用其实体建模模块提供的功能,如拉伸、旋转、阵列、扫描、混合、倒角、螺纹孔等,建立各个零件三维实体模型;并将建立好的各个零件的三维实体模型保存在工作目录[6]。
然后进入装配模式后按设计要求正确装配零部件,并根据连接方式对每个零件进行约束。这里要注意的是基件的装配位置,第一个零件的放置会影响到导入ADAMS后的显示位置。图2所示为绝缘子带电干冰清洗机器人三维模型的截图。

图2 绝缘子带电干冰清洗机器人三维模型
3 运动学仿真
3.1 模型的导入
由于Pro/E中的三维样机模型直接输出的格式并不能在ADAMS中进行直接调用,所以采取在Pro/E中导出x_t格式,再将该模型导入到ADAMS中。打开ADAMS/View界面,然后单击主菜单中的File→Import,单击Import会出现文件导入对话框如图3,并按照图3进行设置,然后单击OK,完成了模型的导入[7]。

图3 文件导入对话框
3.2 设置仿真环境的参数
1)设置工作栅格和单位。
2)按仿真环境中的模型设置正确的重力方向。
3)修改样机模型的每一个零部件的材料属性(整个机器人零部件中,除了底座和部分连杆为硬质铝合金LY12外,其余零部件材料均为MC尼龙66)。
3.3 模型的简化
由于导入的模型比较复杂,会影响仿真结果,因此要对虚拟样机模型进行简化处理,首先删除相对于样机模型没有运动关系,且质量很小的零件,如螺栓、螺母或者垫片等,然后利用布尔和操作将相互之间不存在运动关系,并且材料属性有相同的部件连接在一起,图4为简化后的虚拟样机模型。

图4 简化后的虚拟样机模型
3.4 运动副的建立
设置各个连杆之间的运动关系,完成各运动部件之间的运动副的建立。具体连接关系如表5所示,最终虚拟样机模型如图5所示。

表1 连接关系

图5 虚拟样机模型
3.5 仿真分析
本文中基于机器人的工作情况,工具末端做垂直升降,给工具末端添加移动副,并添加驱动,然后对仿真对话框进行设置End Time=180,Step=400,进行仿真,得到主臂和连杆的角速度曲线如图6和图7所示,并测得工具末端的位移曲线如图8所示,然后通过ADAMS/Post processor生成主臂和连杆的速度样条曲线分别命名为ZB_2和LG_2,返回ADAMS/View界面,把样条曲线添加到主臂和连杆上,即把主臂上的驱动MOTION_ZB修改为1d *CUBSPL(time,0,.robot_20141108.ZB_2,0),把连杆上的驱动MOTION_LG修改为1d * CUBSPL(time,0,.robot_20141108.LG_2,0)并把工具末端的移动副和驱动进行抑制,再次对虚拟样机进行仿真分析[8,9]。
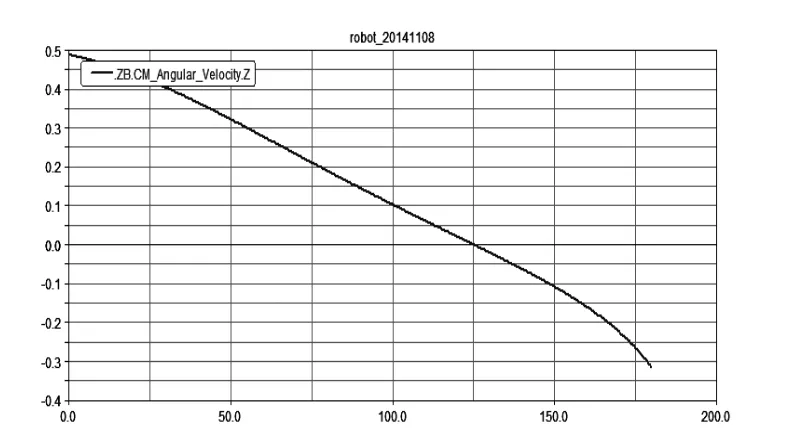
图6 主臂电机的运动角速度曲线

图7 连杆电机的运动角速度曲线

图8 工具末端运动轨迹图
3.6 仿真结果与分析
运动仿真结束后,利用ADAMS/Post processor模块可以得到连杆在任意时间的关节变量值以及任意点的位移、速度和加速度曲线,图9为工具末端在运动平面内X、Y两个方向上的位移、速度和加速度曲线。

图9 工具末端位移、速度和加速度曲线
4 结束语
本文对绝缘子带电干冰清洗机器人进行了运动学分析,得到了运动学正解和逆解计算,为机器人的运动控制和轨迹规划奠定了基础。本文利用Pro/E技术对零件进行三维建模和装配,然后再将模型导入ADAMS中进行仿真分析,这样既能克服ADAMS软件三维建模能力差的缺点,又能很好地对机器人进行运动学分析,能直观地观察到机器人工具末端的位移、速度和加速度,为以后的清洗过程控制和运动学分析奠定了基础,此技术的成熟可简化产品开发过程,缩短开发周期,减少开发费用和成本,提高产品质量。
[1]王瑜,惠建辉.电力设备带电绝缘清洗技术与实践[J].洗净技术,2003,(2):16-19.
[2]牛元会,程光明,杨志刚.D-H坐标系下机械手正向运动学分析[J].机器人技术2006(7):27-29.
[3]李成伟,贠超.码垛机器人机构设计与运动学研究[J].机械设计与制造,2009,6(6):181-183.
[4]刘清,韩宝玲,罗庆生,黄麟.S7-200可编程控制器在新型智能码垛机器人中的应用研究[J].制造业自动化,2008,30(7):39-43.
[5]李俄锋,徐学林.基于Pro/EADAMS的林木干果采摘臂的运动仿真分析[J].林业机械与木工设备,2010,38(2):34-36,48.
[6]张云静.Pro/ENGINEER野火5.0中文版从入门到精通[M].北京:电子工业出版社,2010.
[7]刘爱敏,韩衍昭,王丽萍.基于Pro/E和ADAMS的齿轮减速器动力学仿真[J].煤矿机械,2011,(9):47-49
[8]徐东涛,孙志礼.基于ADAMS的平动机构运动轨迹的规划与验证[J].机械与电子,2010,(9):59-62.
[9]李增刚.ADAMS入门详解与实例[M].国防工业出版社,2006.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
学与玩(2021年5期)2021-07-30
散文诗(青年版)(2021年5期)2021-07-11
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
中国棉花(2017年10期)2017-11-04
小雪花·成长指南(2017年5期)2017-06-07
海军航空大学学报(2015年1期)2015-11-11
