
基于CRUISE的后轮驱动汽车爬坡性能分析
2015-07-07 07:06黄菊花
制造业自动化 2015年7期
黄菊花,潘 林,曹 铭
(南昌大学 机电工程学院,南昌 330031)
0 引言
1970 年以前,后轮驱动汽车在我国汽车市场上占据主导地位[1]。随着时间的推移,1970年往后,因为前轮驱动汽车在生产成本及重量上的优势,开始在国内占据主导地位。由于后轮驱动汽车在操控性能等方面具备一定优势,所以在一些中高端汽车上还仍比较常见[2]。
关于爬坡性能分析,国外没有对爬坡度进行分析的文章,国内有运用汽车最大坡角实验来研究质心的高度以及摩擦因子等系数对最大爬坡度的影响,但是因考虑风阻影响较小,忽略了风阻对爬坡度的影响。但是风阻是否真的可以忽略不计,并没有实际的去计算考量。
本文首先运用汽车理论公式分别计算出考虑风阻的最大爬坡度并与相同条件下的前轮驱动汽车作比较,第二步计算不考虑风阻的最大爬坡度。而后运用软件进行了后轮驱动车辆的动力性方面的仿真,从建模到参数的输入,再到仿真的结果的输出,最后结合理论对仿真结果进行对比分析[3]。
1 爬坡过程力学分析
图1为汽车加速上坡时的受力图。图中G是汽车所受的重力;ɑ是道路的坡角;hg是汽车质心的高度;Fw是空气阻力;Tf1、Tf2是分别作用在前轮与后轮上的滚动阻力偶矩;Tje是作用在横置发动机飞轮上的惯性阻力偶矩;Tjw1、Tjw2是分别作用于前轮和后轮上的惯性阻力偶矩;Fzw1、Fzw2为作用在车身上分别位于前轮和后轮接地点上方的空气升力;Fz1、Fz2是分别作用于前轮和后轮上的地面法向反作用力;Fx1、Fx2是分别作用于前轮和后轮上的地面切向反作用力;L为汽车轴距;a、b是汽车质心与前后轴之间的距离。
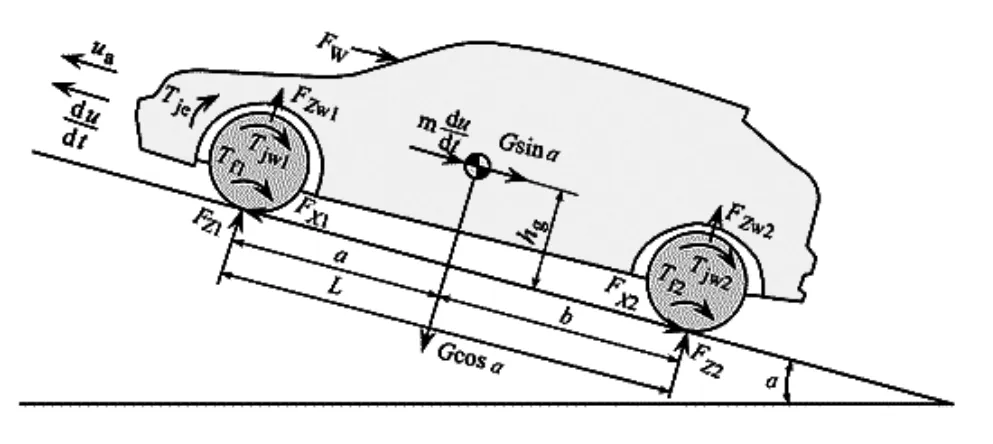
图1 汽车加速上坡受力图
汽车的最大爬坡角度主要取决于两个因素:
1) 发动机提供的最大转矩所决定的牵引力Ft:

式(1)中:Ttq表示的是发动机转矩,ig表示的是变速器的传动比,i0表示的是主减速器的传动比,ηT表示的是传动系的效率,r为车轮半径。
汽车行驶方程:

当在斜坡上时[4]:

式中:Ff表示的是滚动阻力,Fw表示的是空气阻力,Fi表示的是坡道阻力,Fj表示的是汽车行驶时所需要克服的加速阻力,G表示的是重力,CD表示的是空气阻力系数,A表示的是迎风面积,ua表示的是汽车行驶速度,δ表示的是汽车旋转质量转换系数,m表示的是质量。
2) 汽车的动力性还受轮胎与地面的附着条件的限制,作用于轮胎上的转矩Tt引起的地面切向反作用力不能大于附着力。对于后轮驱动的汽车来说,有:

式(7)中:Tf2表示的是后驱动轮上的滚动阻力偶矩,Fx2为后轮上的地面切向反作用力,ϕ称为附着系数。
如图1当在坡道上时,将作用在汽车前、后轮与道路接触中心取力矩,得到作用在前、后轮上的地面法向反作用力Fz1、Fz2:

根据汽车理论里面的知识,忽略掉旋转质量惯性阻力偶矩与滚动阻力偶矩之后,式(8)可以修改成下列式子:

2 后轮驱动汽车整车参数及最大爬坡度的确定

表1 整车基本参数
根据滚动阻力系数f、汽车阻力系数CD与迎风面积A和传动系统效率ηT的选取来计算作用于汽车上的牵引力。
根据汽车理论里面的介绍,对于我们生活当中的路面来说,一般是良好的沥青或者混凝土路面,可以将滚动阻力系数选取在0.010~0.018之间,本文f选取的值为0.015。
本文采用典型的轿车的模型,根据迎风面积的计算公式:A=0.81宽×高[5],计算出迎风面积值A=2.12,空气阻力系数选取为CD=0.32。
根据该后轮驱动汽车采用的是五档变速,单级主减速器,可计算出整体效率:ηT=0.89。
2.1 后轮驱动汽车最大爬坡度计算
如上所述,后轮驱动汽车的最大爬坡度取决于两个因素。一是后轮驱动汽车的最大爬坡度的确定与后轮驱动汽车的最大转矩所能提供的牵引力;二是汽车轮胎与地面的附着条件的限制,即作用于轮胎上的转矩Tt引起的地面切向反作用力不能大于附着力。根据这两个条件便可求得后轮驱动汽车的最大爬坡度。
由发动机提供的最大转矩所决定的牵引力式(1)和汽车的行驶方程(2)所产生的平衡关系,可得:

再将Ff、Fw、Fi、Fj的表达式代入式(10)得:


设sina=t,则式(13)可以整理得:

然后根据已有数据可求得t,再求反三角函数即可求得最大爬坡角a。
由表1及查阅资料可得:

Ttq=235nm G=15400N r=305mm ig=3.62 i0=3 f=0.015 A=2.12m2 CD=0.32 ηT=0.89 L=2920mm CLr=0.246 hg=545mm b=1200mm Clf=0.136 ϕ=0.8
2.1.1 求Ft,ua,Fw:
将Ttq、r、ig、i0、ηT代入式(10)得Ft:

将n、r、ig、i0代入式可以得到速度为ua:45.00km/h
将ua、A、CD代入式(4)得:Fw= 64.95N
2.1.2 含有Fw的最大爬坡度
2.重新制样:(1)称样。称取混匀备用的不含磁性金属物的试样三份,每份1kg,精确至1g,分别为1号、2号、3号。(2)投放已知量。自称量纸上取适量金属物投放到1号中,此时天平数值显示为0.2908g;再取适量金属物投放到2号中,此时天平数值显示为0.2876g;将称量纸上剩余的磁性金属物全部投放到3号中,此时天平数值显示为0.2841g。
再将Fw、G、f、Ft代入式(13)可以得:

解方程式可得t1=0.466,t2=0.492。这里取t=t1继而求得a=27.78°
由imax= t ana∗100%,可以求得:

2.1.3 忽略Fw的最大爬坡度
忽略Fw,可以求得t1=0.470,t2=0.497。这里取t=t1,继而求得a=28.03°
由imax= t ana∗100%,可以求得:

2.2 可行性验证
2.2.1 公式验证
根据后轮驱动汽车的最大转矩所确定的最大牵引力和汽车行驶方程,可以得到后轮驱动汽车的最大爬坡度。这只是满足了动力性方面的要求,还需结合式(7)来验证后轮驱动汽车是不是满足作用于轮胎上的转矩Tt引起的地面切向反作用力没有大于附着力。

2.2.2 代入数据

根据在最大驱动力下需满足附着力方程的要求,得最大爬坡度imax=52.68%
对于前轮驱动的车子代入数据得:

可见,在同等条件下改成前轮驱动力不满足附着力要求,最大爬坡度就达不到52.68%
3 CRUISE建模与仿真
AVL-CRUISE软件主要用于对车辆的动力性,燃油经济性和排放性能进行仿真,对于后轮驱动汽车最大爬坡度是属于车辆动力性里面的内容,一些直观的结果便可在AVL-CRUISE中体现出来[6,7]。
3.1 后轮驱动汽车建模
如图2所示,后轮驱动汽车模型主要包括轮胎(Wheel)、制动器(Brake)、发动机(Engine)、减速器(Single Ratio)、变速箱(Gear box)、离合器(Clutch)、差速器(Differential)、驾驶室(Cockpit)模块等。
汽车模型能量链接及信号连接:
模型中的能量链接包括机械链接,排气系统链接和电器系统链接。这里的能量链接指的就是其中的机械链接[8]。如图2所示,图形中每个组件都有小方块在边上,这就是建立能量链接的点。鼠标右键点击其中的一个小方块,再点击connect就可以建立链接。当两个部件中有蓝色的线相连接,则此时两部件处于机械链接状态。机械链接是模型当中必不可少的一部分,也是比较简单的一部分,基于汽车构造基础理论便可以顺利的建立汽车模型。
信号连接是建立模型中比较难的一部分,也是模型能否正常运行最关键的一部分[9]。要想正确的建立组件间的信号连接,需要对汽车系统有比较细致的认识,需要了解控制关系和各个组件之间的信号流向,只有清楚的了解信息的流向才能正确的建立模型之间的信号连接。如图2所示,车辆防滑控制(ASC)需要离合器(Clutch)、Load signal和后轮滑行信号的输入。像前轮滑行系数则不在后轮驱动防滑控制的考虑之内。

图2 后驱汽车模型各组件间的信号连接
各个组件的参数输入:
先是对于整车参数的一些设置,例如整备质量,发动机的参数,离合器的参数等。而后对运算的任务进行参数的设置,例如驾驶员的信息,风速等[10]。
3.2 仿真计算与分析
3.2.1 仿真计算
在进行完模型的建立,能量链接,信号连接及参数设置之后需要对之前的步骤进行检查,Cruise软件里的键可以检查模型中存在的问题[11]。
该模型是针对UDC工况(欧洲公交车客车循环工况)进行仿真(如图3所示)。
爬坡性能分析分为两种:一是Climbing Performance without slip(在不考虑侧滑的情况下,汽车所能达到的最大爬坡度,如图4所示);第二个就是Climbing Performance without slip-limited(考虑一定侧滑,也就是在满足附着力的情况下的最大爬坡度,如图5所示)。

图3 UDC工况

图4 不考虑侧滑的爬坡性能(后驱汽车)

图5 考虑侧滑的爬坡性能(后驱汽车)

图6 考虑侧滑的爬坡性能(前驱汽车)
如图4、图5两幅图,在不考虑侧滑和考虑有限侧滑的情况下,两幅图的曲线走向是相同的,由图可以看出,爬坡度的最大值在一档的位置上。当汽车挂在一档时,车速在45km/h左右时可以达到最大爬坡度imax= 47%。
图6表达的是前轮驱动汽车在考虑附着力的情况下的最大爬坡度。

图7 不考虑风阻的爬坡性能
3.2.2 分析
1)如图4,图5所示。两图的曲线所对应的x,y轴数据都是相同的,这个仿真结果满足式(17),与计算值式(14)存在约5.68%的误差。通过驱动力所计算的最大爬坡度满足附着力的要求,所以考虑附着力与不考虑附着力的仿真结果应该相同,仿真结果满足要求。
2)如图5,图6所示。两图分别表示在满足附着力的要求下,后轮驱动汽车与前轮驱动汽车的最大爬坡度,两图满足式(17)和式(18)的计算。后轮驱动汽车满足附着力的要求,能达到最大驱动力下最大爬坡度,而前轮则不能。
3)如图5,图7所示。图5表示的是考虑附着力和风阻的情况下,后轮驱动汽车所能达到的最大爬坡度,图7表示的是考虑附着力,但是不考虑风阻下的最大爬坡度。两图可以看出波峰之间的坡度差为0.5%,满足式(15)与式(14)之差。
4 结论
1)由分析可知,在本文所述条件下,后轮驱动汽车的最大爬坡度要大于前轮驱动汽车的最大爬坡度。由此也可体现出后轮驱动汽车,在上述情况下的动力性能是要强于前轮驱动汽车的。
2)考虑风阻的情况下,通过理论计算所得最大爬坡度为52.68%,仿真结果约为47%,两者结果误差5.68% 。在不考虑风阻的情况下,通过理论计算所得最大爬坡度为53.24%,
仿真结果约为47.5%,两者结果误差5.74% 。考虑风阻与不考虑风阻两种情况下,理论计算值之差为0.56% ,仿真值之差为0.5%与计算值相符合。所以可认定为,不计入风阻的爬坡度要比算入风阻的爬坡度高0.5% 。0.5%的坡度在要求比较严格的状态下还是需要计算在内的。
[1]李颖.前后轮驱动的区别[J].汽车知识.2013(8).
[2]余志生.汽车理论.[M].北京:机械工业出版社.2009.
[3]李俊伟,苏铁雄.基于CRUISE的纯电动车动力参数匹配与性能仿真.[J].河北农机.2014(4).
[4]任维华.基于AVL-CRUISE软件的整车滑行优化及仿真应用.[J].技术纵横.2014(4).
[5]阮志刚.汽车迎风面积测量方法的研究.[J].汽车科技.2006(6).
[6]阳洋,王傅忠,黄菊花.增程式电动汽车动力系统仿真匹配分析.[J].机械设计与制造.2014(9).
[7]刘振军,赵海峰,秦大同.基于CRUISE的动力传动系统建模与仿真分析[J].重庆大学学报(自然科学版).2005(11).
[8]陶新武.基于AVL-CRUISE软件的纯电动汽车动力系统设计[J].中国电子商务.2014(11).
[9]王保华,罗永革.基于CRUISE的汽车建模与仿真.[J].湖北汽车工业学院学报.2005(6).
[10]曾小华,于永涛,王加雪,王庆年,王鹏宇.基于CRUISE软件的混合动力客车主动同步换挡的建模与仿真[J].吉林大学学报(工学版).2008(9).
[11]朱剑平.基于CRUISE软件的车辆性能分析与优化[J].汽车实用技术.2012(3).
猜你喜欢
放学后(2022年8期)2022-07-18
上海涂料(2021年5期)2022-01-15
上海涂料(2021年5期)2022-01-15
陶瓷(2021年8期)2021-09-26
当代陕西(2021年13期)2021-08-06
专用汽车(2021年1期)2021-01-29
当代工人(2020年1期)2020-05-11
汽车实用技术(2019年3期)2019-03-05
科技创新与应用(2018年1期)2018-01-19
装备环境工程(2015年5期)2015-02-28
