基于圆迹干涉SAR的DEM提取
2015-07-12 14:11燕林赟谭维贤洪
电子与信息学报 2015年6期
刘 燕林 赟谭维贤洪 文
①(中国科学院电子学研究所 北京 100190)
②(空军装备研究院 北京 100085)
基于圆迹干涉SAR的DEM提取
刘 燕*①②林 赟①谭维贤①洪 文①
①(中国科学院电子学研究所 北京 100190)
②(空军装备研究院 北京 100085)
圆迹干涉SAR具有对场景目标进行全方位观测测量的优势,为了满足高分辨率圆迹SAR成像对高精度的场景数字高程模型(Digital Elevation Model, DEM)的需求,该文提出了一种基于圆迹干涉SAR数据的高程估计方法。首先推导了采用后向投影(Back Projection, BP)算法时的圆迹干涉SAR信号模型,然后给出了基于圆迹干涉SAR处理的场景DEM提取流程,最后通过仿真实验验证了所提方法的有效性。
合成孔径雷达;圆迹SAR;干涉;数字高程模型
1 引言
合成孔径雷达(SAR)具有全天时、全天候、高分辨、大区域成像的能力,在军事和民用领域得到了广泛的应用。在传统直线轨迹SAR模式下,SAR图像仅能获取观测对象在某小范围方向上的后向散射[1],为了进一步提高SAR的观测能力,90年代初,美国学者Knaell[2]提出了圆迹合成孔径雷达(Circular SAR, CSAR)概念。在圆迹SAR模式下,雷达通过对观测场景的360°观测,能够获取目标全方位的散射特征,同时其理论分辨率可以达到亚波长量级,以及具有3 维成像能力,上述优势极大地拓展了传统SAR成像系统的性能和应用领域,近十余年来圆迹SAR得到了广泛的研究和应用[3−9]。
如何利用圆迹SAR数据对场景进行精确重建,是圆迹SAR技术得以广泛应用的前提条件。有别于雷达载体做直线运动的条带或聚束SAR成像,圆迹SAR成像时需要用到精确的场景DEM数据。这是由于,圆迹SAR通常采用正射成像的方法得到360°全方位观测的结果,若成像时所参考DEM数据与实际不符,回波在图像上体现为在观测方向发生偏移。该偏移量等于雷达到目标下视角的正切值与参考DEM误差的乘积。当偏移量大于等于1/2分辨单元时,参考DEM误差将不能忽略,尤其是对于各向同性的点目标而言,当参考高程不准确时,其在图像上将形成一个半径与参考高程的误差有关的圆环。因此,圆迹SAR成像时所采用的参考DEM数据的精确程度影响着最终的圆迹SAR图像质量,若要实现圆迹SAR的精确成像,参考DEM误差引起的这个偏移量应小于圆迹SAR图像分辨率的1/2。
现有机载圆迹SAR实验中,成像时所参考的场景DEM主要通过激光雷达(Lidar)获取。由于激光雷达成本高、激光穿透性与SAR使用的微波波段不同、平台飞行高度有限等方面的局限性,仅仅依赖Lidar获取场景DEM将会影响圆迹SAR技术应用的进一步推广(尤其是一些需要实时获取场景图像的军事应用)。若能够直接利用圆迹SAR数据本身进行场景高程信息提取,则可以有效实现成像处理的一体化,做到实时成像。在通过圆迹SAR数据获取场景高程信息的研究方面,国内外仅对体现圆迹SAR 3维分辨能力的立体测量方法进行了相关研究[10]。2007 年,法国宇航局利用SETHI 机载SAR系统采集的X 波段机载圆迹SAR 数据获取了法国Nîmes 城区的全方位观测DEM。试验中DEM的获取是通过立体测量方法实现,精度达1.5 m。该试验主要是为了验证圆迹SAR的3维分辨能力,从而体现360°观测在城市测绘中的潜力,其获取的DEM精度仍不能满足高分辨率圆迹SAR精确成像需求[10]。
SAR图像DEM信息获取是SAR的重要应用之一,其获取方法可以分为“SAR干涉测量”和“SAR立体测量”两种。对于基于圆迹SAR数据的DEM获取,圆迹SAR干涉测量利用雷达图像的相位信息,而圆迹SAR立体测量仅利用其强度(灰度)信息获取场景DEM数据,因而,前者获取的DEM精度高于后者。同时,由于圆迹SAR可获得目标全方位的散射特性分布,可以获得目标散射系数最强方向的SAR 回波信号[4],这对于干涉SAR处理是十分有利的[11](散射系数越高信噪比越高,影响相干性的其他因素相同的情况下,信号的信噪比越高高程估计结果越精确)。现有关于圆迹干涉SAR的研究主要有小型目标3维成像[12,13]以及地球表面地形形变估计[14],根据目前能够掌握的研究现状来看,基于圆迹干涉SAR的场景DEM估计还未开展深入的研究。因此,有必要针对圆迹SAR数据,对干涉SAR高程估计的方法进行研究。
为了满足高分辨率圆迹SAR成像对高精度场景DEM的需求,本文提出了一种基于圆迹干涉SAR数据的高程估计方法。首先,建立了采用时域成像算法时的圆迹干涉SAR信号模型;然后,给出了基于圆迹干涉SAR处理的DEM提取流程;最后,仿真实验验证了所提方法的有效性。
2 基于反向投影(BP)成像算法的CSAR干涉信号模型
由于圆迹SAR的特殊运动轨迹,条带或聚束SAR成像时采用的频域算法[15]均不适用于圆迹SAR成像,因此圆迹SAR成像多采用时域算法来实现,如BP算法[16]。基于时域处理的BP成像算法具有逐点成像的特性,适用于进行圆迹SAR成像,本文对InSAR 平台主、副天线分别独立进行BP成像。对于BP成像,理想的点目标回波响应在整个轨线上的相位均被校正,因此,传统直线干涉SAR信号模型的分析方法将不再适用于圆迹干涉SAR信号建模,需要采用基于时域算法的干涉SAR信号模型[13,16]。
圆迹干涉SAR的几何模型如图1所示。天线1为主天线,天线2为副天线,两个雷达天线间的基线长度为b,与水平面的夹角为β。雷达平台在距离地面的高度平面作圆周运动,采用交轨干涉模式,两个天线分别形成两条独立的圆形孔径。方位角θ∈[0,2π],主天线的运动轨迹半径为R。在本文中,假设主副天线采用乒乓收发模式,每个天线各自发射Chirp 信号,带宽为Br,波长为λ。设场景中有一个点目标P,为了便于分析,假设目标P的散射系数在方位角范围内保持一致(其中Δθ为合成孔径的方位角度),在其他方向的散射系数为零。对于机载单航过圆迹干涉SAR而言,由于基线长度有限,两幅天线视角十分接近,同时天线特性以及发射信号基本一致,从而接收到的信号以及信号的来波方向基本一致。因此,机载单航过干涉SAR情况下,可以假设两幅天线的后向散射特性一致。
为了使表述得更清楚,我们建立了一个新的坐标系,如图2所示。其中,z'轴等同于z轴,y'表示零多普勒位置载机飞行方向,x'轴由右手坐标系确定,位置A, B 对应天线1和天线2的零多普勒位置,ψ为天线A关于目标的下视角。在3维空间中,对于天线1,目标P被重建为直线段PA'(实际上是弧线段,远场下可认为是直线段),对于天线2,被重建为PB'。由于两干涉天线观测视角存在差异,两条直线段只在P真实高度处相交,而在其他高度平面,其真实高度与成像参考高度之间的高度差将引起图像对之间的偏移。
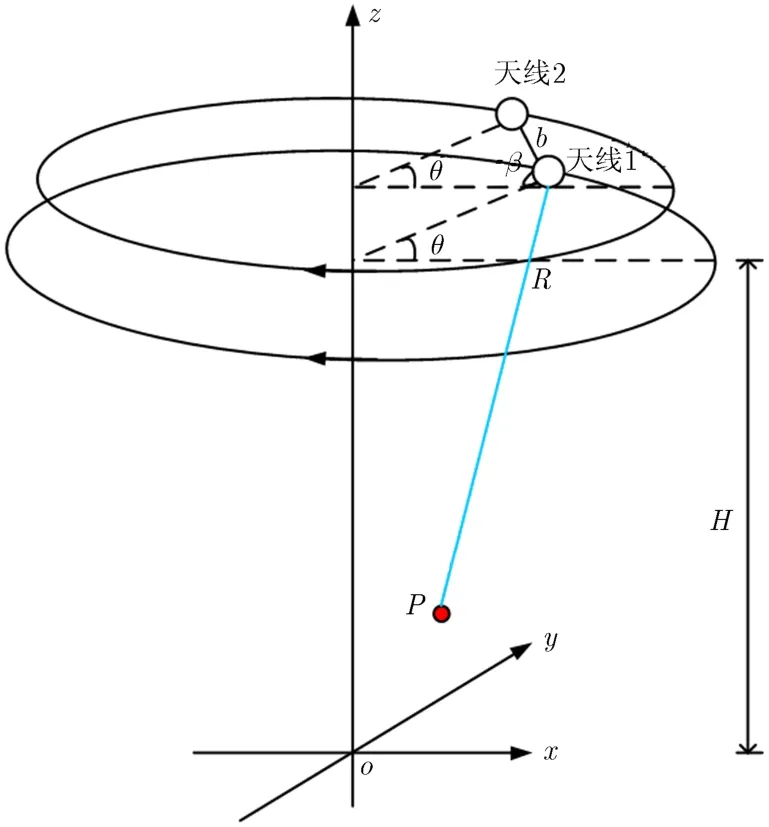
图1 干涉圆迹SAR 几何模型
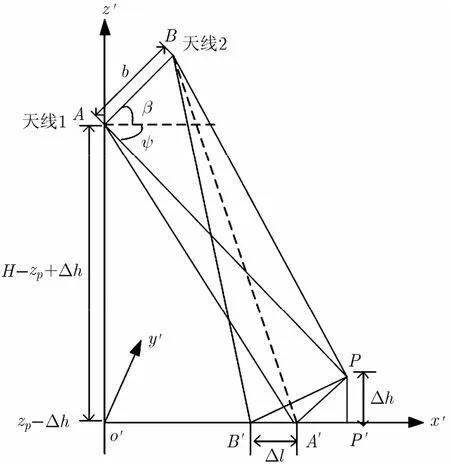
图2 干涉圆迹SAR 局部几何关系
BP算法首先将原始回波数据进行距离压缩,然后通过精确补偿成像空间中每个采样点到合成孔径长度内每个天线相位中心的回波时延相位并进行相干累加,从而恢复场景散射点的目标函数。对于目标P,天线1在P处需要补偿相位为ϕc1, ϕc1可以表示为




对于天线1而言,对目标P进行相位补偿时存在着偏置相位ϕb1:

对于天线2而言,对目标P进行相位补偿时存在着偏置相位ϕb2:

从而,图像在C处的干涉相位可以表示为


由于C与A'的位置距离小于一个分辨单元,因此,主副天线到C的距离差与到A'的距离差十分接近,即,。目标P在C处的干涉相位可以近似表示为式(8)体现了干涉相位与成像参考高程误差Δh之间的关系。从式(8)看,该干涉相位与高程的关系式同直线干涉SAR处理中去平地相位后的干涉相位表达式一致,但实际上,采用BP算法的干涉SAR数据处理还有若干问题需要考虑,这些将在下一节进行详细分析。
3 基于BP算法的干涉SAR数据处理的局限性
相比传统的频域成像算法,采用通过BP算法得到的干涉图像存在下述局限:
(1)当主副图像对的像素偏移大于一个分辨单元时,主副图像将不再相干。通过第2节的分析可知,基于BP算法的干涉处理方法无需配准处理,主副图像直接共轭相乘即可得到干涉相位图。主副图像直接共轭相乘获得干涉相位信息的前提条件是参考高程误差所引起主副图像对的像素偏移在同一个分辨单元内,在这种情况下,干涉相位与高程的关系满足式(8);否则,主副图像对将不再相干,干涉相位将类似于噪声,不能用于进行高程估计。
如图2所示,当目标P的实际高程与参考高程相差Δh时,图像对的偏移量为,根据勾股定理,可以求得图像对的偏移量
(2)图像散焦。 对于BP算法而言,当成像参考DEM与真实DEM不一致时,成像结果会随着参考高程误差情况发生不同程度的散焦。在进行圆迹SAR成像时,由于其特殊的运动轨迹,与直线SAR成像相比,散焦将更为严重。散焦会影响到干涉图像的信噪比,使得图像的相干性下降,进而影响到测高的精度。
为了便于分析该项误差,假设目标P位于场景中心(运动半径的圆心),高度为0 m,成像参考高程误差为Δh。对于天线1而言,在x轴上,P的成像位置较其实际位置偏移量为。根据图2所示的几何关系,结合勾股定理,可以推出

由于存在高程误差,真实成像位置与目标位置存在差异,成像时对目标P的相位积累存在差异可以表示为
其中,合成孔径θa∈[−Δθ/2,Δθ/2],Δθ为合成孔径的角度。
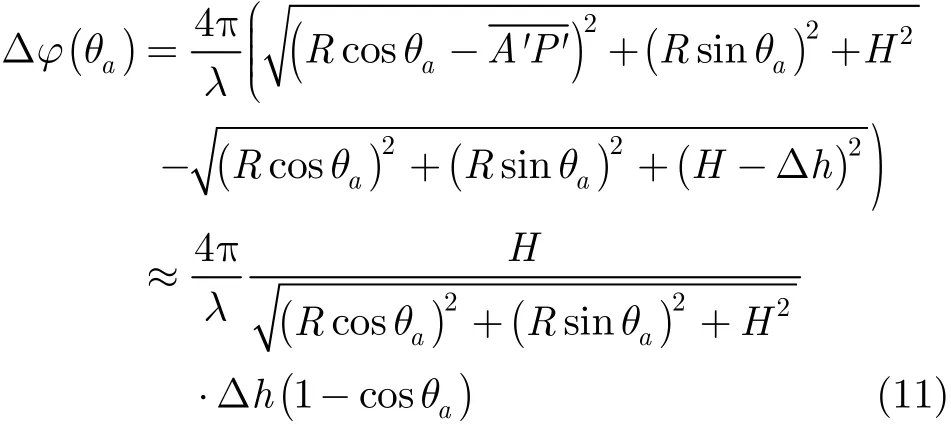
将式(10)代入式(11)并化简之,式(11)可以表示为
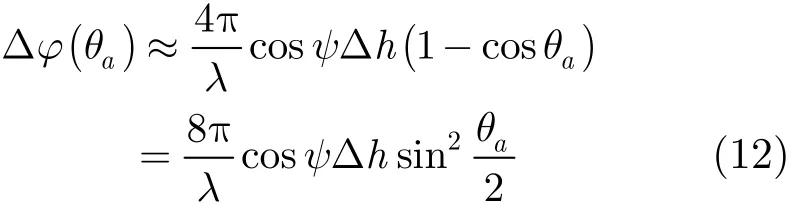
从式(12)可以看出,成像参考高程误差将会导致成像结果存在二次相位误差,根据二次相位误差的定义[17],二次相位误差可以表示为

该二次相位误差随着高程误差Δh以及合成孔径角度Δθ的增大而加大,当QPE≥π/4时,会造成图像的散焦,从而降低干涉图像的信噪比,影响到高程估计的精度。由于图像分辨率随着合成孔径角度Δθ的减少而变差,因此若要保证图像不散焦,必须将高程误差Δh控制在一定范围内。
综上所述,圆迹SAR成像所采用的参考高程误差过大时将会影响到圆迹干涉SAR高程估计方法的效果。为了尽量降低BP成像时采用的参考DEM与真实DEM的差异,我们采用立体像对测量方法进行高程的初步估计[10],在粗估出的DEM基础上采用BP成像方法获取主副图像对,进而采用干涉方法估计精确的高程。
4 圆迹干涉SAR处理流程
本文给出了一种圆迹干涉SAR高程估计处理方法。处理框图如图3所示。
具体步骤如下:
(1)采用立体像对测量的方法粗估计出场景DEM,作为首次干涉处理时成像采用的参考场景DEM。
为了避免由于成像参考平面与真实DEM差距大导致的图像散焦所引起的相干性下降,本文首先需要初步估计出场景的DEM,作为生成干涉图像的参考DEM。该DEM的精度需满足高程误差Δh引起的二次相位误差QPE需小于等于π/4。圆迹SAR具有3维成像能力,在进行2维成像时,位于成像参考平面外的目标在不同方位角度观测时,将投影到成像平面的不同位置,因此可以通过立体像对测量的方法估计场景的DEM[10]。该方法获得的粗DEM精度可以满足上述精度要求(具体论证见文献[10])。
(2)在参考场景DEM的基础上,对InSAR 平台主、副天线分别独立进行 BP 成像,其中采用分子孔径的方式对主副天线获取的圆迹SAR数据进行BP成像。
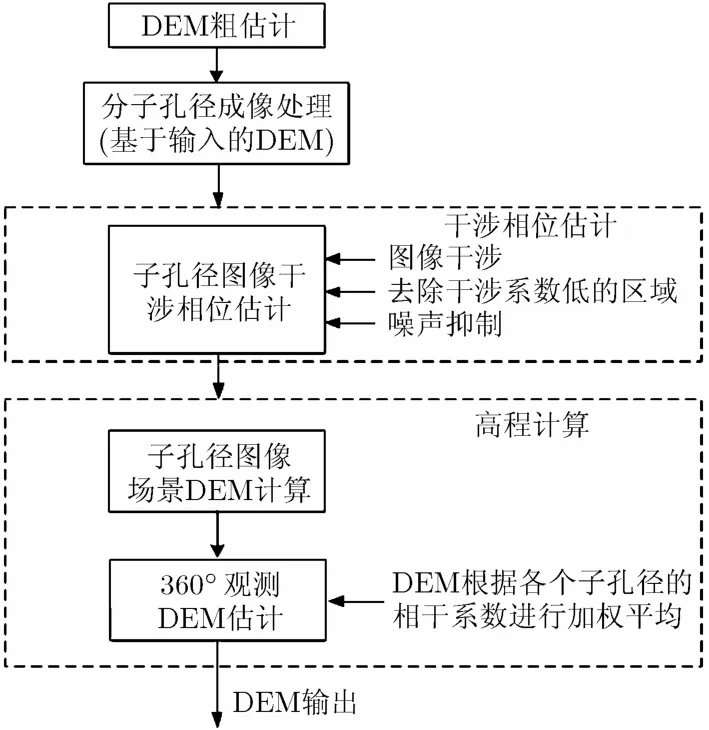
图3 干涉圆迹SAR高程测量处理流程
目标的后向散射特性决定了进行SAR成像处理时目标相干积累角的大小。因此,成像时采用的合成孔径角度需要考虑到目标的后向散射特性。由于在机载圆迹SAR情况下,大多数目标的后向散射特性为各向异性,若采用全孔径成像,所成图像将会散焦。为了保证重建图像的质量,有必要引入子孔径处理对场景目标进行重建。此外,采用BP算法进行圆轨迹SAR成像时,由参考DEM误差引起的二次相位误差随着合成孔径角度的增大而增加(参考式(13))。因此,若要避免图像散焦,在参考DEM精度确定的情况下,合成孔径角度也需要控制在一定范围内。本文圆迹干涉SAR处理采用子孔径处理的方法进行。子孔径合成孔径角度的设定需要参考目标的散射特性、粗估DEM的精度以及圆迹成像的分辨率精度要求。
(3)对于每个图像对,进行干涉处理。其中包括:(a)图像干涉;(b)去除干涉图像中相干系数低的区域;(c)干涉图像滤波去噪;(d)高程恢复。
(a)图像干涉 主副天线获取的复图像对经过共轭相乘后得到的相位就是干涉相位,我们可以由此生成干涉相位图。根据式(8)所示,采用BP成像算法得到的圆迹干涉SAR的干涉相位中不包括“平地效应”引起的相位差(“平地效应”引起的相位差即高度不变的平地因为雷达视角的变化引起的相位差),仅包括由地形相对高度变化引起的相位差;另一部分是由高度不变的平地因为雷达视角的变化引起的相位差。因此,我们无需在干涉相位图滤波前,去除平地效应对干涉相位的影响。
(b)去除干涉图像中相干系数低的区域 采用干涉进行高程测量的前提是主副图像是相干的,干涉图像的相干性决定了干涉SAR 测高或测形变成像的质量。对于机载单航过圆迹干涉SAR而言,热噪声去相干是去相干因素的一个重要方面。热噪声去相干主要取决于目标的后向散射强度。当目标的后向散射强度很弱时,热噪声去相干十分明显。由于圆迹SAR具有全方位观测的优势,可获得多角度乃至全方位的目标散射特性分布。因此,当某个方位观测角度下出现由于目标散射强度低而导致低相干区域时,我们在该方位观测角度下的高程恢复时不采用该目标区域的干涉相位信息,采用其它高相干区域的干涉相位信息,从而可以避免低相干相位信息对高程估计精度的影响。根据工程实验经验,一般当子孔径干涉图像区域的相干系数小于0.4或0.5时,我们在高程反演时将不采用该区域的相位信息。
(c)干涉图像滤波去噪 原始干涉图中存在着大量的相位噪声,这会导致高程估计精度的下降,为了降低相位噪声影响,通常需对干涉图进行噪声抑制。由于本文采用在粗估计的DEM上进行成像,参考成像高程较实际场景高程而言,误差不大,干涉图像的相位不会发生缠绕现象,因此在进行滤波去噪时,我们无需考虑滤波方法对干涉图条纹边缘的破坏,简单起见,本文选择均值滤波方法[18]。
(d)高程恢复 反演参考地形与真实地形的相对高度信息,然后进行地面位置校正。根据InSAR高程测量的机理,可以求出干涉相位图中每个像素点所对应的地面样点的高度值,这一过程就是干涉相位值到地面高度值的转换。基于参考DEM的BP算法的高程反演,需要首先计算成像参考地形到雷达的斜距信息以及参考DEM到雷达的下视角,然后根据干涉相位与目标高程之间的关系式(式(8)),反演出参考地形与原始地形的相对高度信息。由于干涉图像上的像素点对应的高度不同,使得等间隔分布的样点,在地面上呈不等间隔分布,因此,需要对反演出高程进行地面位置校正,即恢复地形在地面上的等间隔采样。地面位置校正的处理步骤如下:首先,结合各像素点的高度值,求出它们在地面上的具体位置[19],生成准确的地形曲面;然后,根据前一步生成的曲面,进行等间距插值,进而得到等间距采样的参考地形与原始地形的相对高度信息。
(4)将步骤(3)获得的各子孔径干涉处理估计出的参考地形与原始地形的相对高度,根据其干涉系数的大小,进行加权平均,结合参考高度信息,得到360°观测下的场景高程。最后将全方位观测得到的参考地形与原始地形的相对高度加上参考地形高程,最终得到场景地形高程。
5 仿真实验
采用下述仿真参数对基于圆迹干涉SAR处理的高程估计算法进行验证。仿真参数如下:波长为0.03 m,信号发射带宽为500 MHz,雷达平台高度为18000 m,平台运动半径为18000 m,线速度为150 m/s,雷达下视角为45°,基线长2.6 m且与水平方向夹角为0°。场景中心设置一个半径40 m、高12 m的圆锥目标。为了便于分析,假设目标各个观测角度散射特性保持一致。我们在回波数据中加入了独立的复高斯白噪声,使最终聚焦图像的信噪比为20 dB。由于本仿真实验仅仅是原理性的验证,因此仿真过程中并未考虑到实际中的基线误差以及倾角误差。采用上述参数进行圆迹SAR回波仿真,场景高程分布如图4所示。
首先,采用所提方法步骤(1)给出的立体像对测量的方法,粗估计出场景的DEM,估计精度约为1.4 m;根据式(14),可以推知,当合成孔径角度小于7°时,在以该DEM为参考高程进行BP成像,由于参考高程与实际高程之间的误差所引起的图像散焦可以忽略。为了保证干涉图的质量,在实验中,采用每6°一个子孔径进行干涉处理。
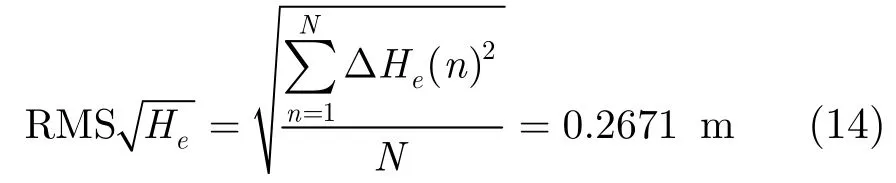
单个子孔径的干涉SAR高程恢复结果如图5所示,将单子孔径得到的高程与真实高程进行比较,误差如图6所示,其均方根误差为
而将多个子孔径的高程恢复结果(90°的方位观测角度,15个子孔径)进行融合,高程反演结果如图7所示,相比于图5,其高度变化更平滑。将多个子孔径融合得到高程结果与真实高程进行比较,误差图如图8所示,可以看出,高程估计误差与图6相比明显下降,其均方根误差为0.1055m。
通过比较子孔径与多孔径联合的干涉SAR高程估计误差情况,可以看出,多个角度观测估计出的高程较单个子孔径观测估计出的高程更为精确,这说明了圆迹干涉SAR高程估计的优势。该仿真假设散射点各个方向散射情况相同,圆迹观测的优势在于对各个方向子孔径估计出的高程误差的平均。在实际场景中,由于目标在各个观测角度的散射强度不同,根据本文干涉系数加权平均的方法融合各个子孔径的高程估计结果,可以更好地利用目标散射强度高的信号进行干涉高程估计。
本文进行DEM估计的目的是为了给圆迹SAR成像提供精确的参考高程信息,要保证圆迹SAR实现精确成像,参考高程误差Δh(基于圆迹干涉SAR的DEM估计精度)与分辨率ρr需满足关系式Δh≤ρrtanθ/2(θ为雷达对目标的下视角)。在仿真实验参数下,该高程估计精度可以满足分辨率为0.2 m的圆迹SAR成像需求。
6 结束语
有别于条带或聚束SAR成像,圆迹SAR成像时需要用到精确的场景DEM数据。相比激光雷达测量成本高、平台飞行高度有限以及立体测量精度低的缺点,本文提出的基于圆迹干涉SAR的DEM估计方法。通过对圆迹SAR数据的处理,可以为圆迹SAR成像提供高精度的DEM,从而实现圆迹SAR的精确成像。下一步将进行机载平台下的圆迹干涉SAR验证试验,该试验的准备工作目前正在进行中。
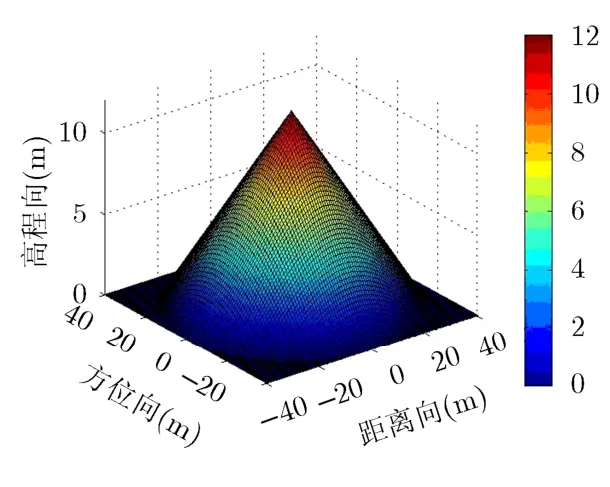
图4 场景高程分布
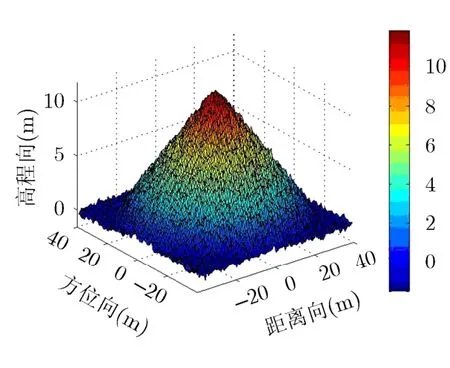
图5 子孔径高程恢复结果
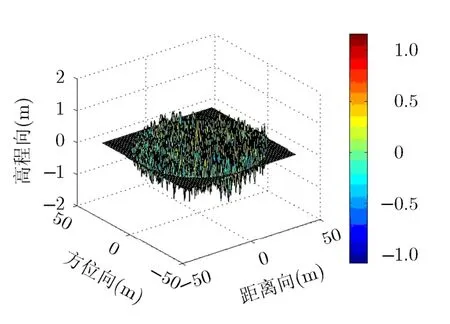
图6 子孔径高程恢复误差
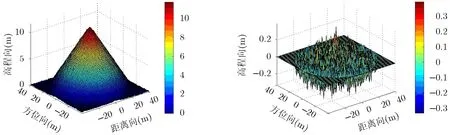
图7 多个子孔径联合高程恢复结果
图8 多个子孔径联合高程恢复误差
Transactions on Geoscience and Remote Sensing, 2012, 50(11): 4720-4725.
[1] Mosesa R L, Pottera L C, and Cetinb M. Wide angle SAR imaging[C]. 2004 SPIE. Algorithms for Synthetic Aperture Radar Imagery, XI, Orlando, Florida, USA, 2004: 164-175.
[2] Knaell K. Three-dimensional SAR from practical apertures [C]. SPIE, Radar/Ladar Processing and Applications, 1995, 2562: 31-41.
[3] Lin Y, Hong W, Tan W X, et al.. Airborne circular SAR imaging: results at P-band [C]. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Munich, Bavaria, Germany, 2012: 5594-5597.
[4] Ponce O, Prats-Iraola, P, Pinheiro M, et al.. Fully polarimetric high-resolution 3-D imaging with Circular SAR at L-band[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 54(6): 3074-3090.
[5] Kou L L, Xiang M S, Wang X, et al.. Tropospheric effects on L-band geosynchronous circular SAR imaging[J]. IET Radar, Sonar & Navigation, 2013, 7(6): 693-701.
[6] Ponce O, Prats-Iraola P, Scheiber R, et al.. Polarimetric 3-D reconstruction from multicircular SAR at P-Band[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(4): 803-807.
[7] Poisson J B, Oriot H, and Tupin F. Performances analysis of moving target tracking in circular SAR[C]. Proceedings of International Radar Symposium, Dresden, Germany, 2013(1): 531-536.
[8] Ponce O, Prats P, Scheiber R, et al.. Analysis and optimization of multi-circular SAR for fully polarimetric holographic tomography over forested areas[C]. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 2013: 2365-2368.
[9] 林赟, 谭维贤, 洪文, 等. 圆迹SAR 极坐标格式算法研究[J].电子与信息学报. 2010, 32(12): 2803-2807.
Lin Yun, Tan Wei-xian, Hong Wen, et al.. Polar format algorithm for circular synthetic aperture radar[J]. Journal of Electronics & Information Technology, 2010, 32(12): 2803-2807.
[10] Palm S, Oriot H M. Radar-grammetric DEM extraction over urban area using circular SAR imagery[J]. IEEE
[11] 王超, 张红, 刘智. 星载合成孔径雷达干涉测量[M]. 北京: 科学出版社, 2002: 33-39.
[12] Bertl S, Dallinger A, and Detlefsen J. Interferometric focusing for the imaging of humans[J]. IET Radar, Sonar & Navigation, 2010, 4(3): 457-463.
[13] Ertin E, Moses R, and Potter L. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR[J]. IET Radar, Sonar & Navigation, 2010, 4(3): 464-473.
[14] Kou L. L, Wang X Q, Xiang M S, et al.. Interferometric estimation of three-dimensional surface deformation using geosynchronous circular SAR[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1619-1635.
[15] Soumekh M. Synthetic Aperture Radar Signal Processing with MATLAB Algorithms[M]. New York: Wiley, 1999, Chapter 4-8.
[16] Pan Z H, Li D J, Zhang Q J, et al.. Airborne MMW InSAR interferometry based on time varying baseline and BP algorithm[C]. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Munich, Bavaria, Germany, 2012: 7412-7415.
[17] Cumming I G and Wong F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Norwood, MA: Artech House, 2005, Chapter 3.
[18] Lim I, Yeo T S, Ng C S, et al.. Phase Noise Filter for Interferometric SAR[C]. Proceedings of International Geoscience and Remote Sensing Symposium, Singapore, 1997: 445-447.
[19] 付涛. InSAR高保相成像及关键技术研究[D]. [博士论文], 电子科技大学, 2013.
刘 燕: 女,1982年生,博士后,研究方向为圆迹SAR成像处理.
林 赟: 女,1983年生,助理研究员,研究方向为圆迹SAR成像处理.
谭维贤: 男,1981年生,副研究员、研究方向为雷达成像.
洪 文: 女,1964年生,研究员,博士生导师,研究方向为SAR成像、极化SAR成像处理.
DEM Extraction Based on Interferometric Circular SAR
Liu Yan①②Lin Yun①Tan Wei-xian①Hong Wen①
①(National Key Laboratory of Science and Technology on Microwave Imaging, Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)
②(Air Force Equipment Research Institute, Beijing 100085, China)
Since Interferometric Circular SAR (InCSAR) has the advantage of all-directional observation, a method for Digital Elevation Model (DEM) extraction based on InCSAR is proposed to ensure the high accuracy of the high resolution Circular SAR imaging. Firstly, the signal model of InCSAR is presented when Back Projection (BP) processing is adopted for SAR imaging; secondly, DEM extraction based on InCSAR is proposed; thirdly, the proposed method is validated by the simulation test.
SAR; Circular SAR (CSAR); Interferometry; Digital elevation model (DEM)
TN958
: A
:1009-5896(2015)06-1463-07
10.11999/JEIT141022
2014-07-30收到,2015-02-28改回
国家自然科学基金青年基金(61201404)和国家自然科学基金(61372186)资助课题
*通信作者:刘燕 liuyan_1028@163.com
猜你喜欢
当代陕西(2020年23期)2021-01-07
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
中国交通信息化(2017年10期)2017-06-06
雷达学报(2017年1期)2017-05-17
光学精密工程(2016年1期)2016-11-07
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
重庆建筑(2014年12期)2014-07-24