球式自动平衡装置数值仿真系统设计
2015-08-19 01:52任志湘
噪声与振动控制 2015年5期
谭 青,任志湘,魏 来
(中南大学 机电工程学院,长沙410083)
球式自动平衡装置数值仿真系统设计
谭青,任志湘,魏来
(中南大学机电工程学院,长沙410083)
在球式自动平衡装置的数值仿真中,传统的仿真方法是利用Matlab进行数值仿真,得到的结果不具直观性和交互性。为了解决上述问题,现利用VB平台,采用龙格—库塔法对球式自动平衡装置的数学模型进行数值求解,设计一种能够使仿真结果动态可视化的交互式数值仿真系统。仿真结果表明,该数值仿真系统增加仿真结果的直观性,实现滚球运动状态的动态呈现。得到的仿真结果与自同期理论一致,不平衡转子的振幅得到有效的衰减。
振动与波;球式自动平衡装置;数学模型;数值仿真系统;减振
对于回转机械而言,转子不平衡将导致回转机械产生振动和噪声,甚至会引发灾难性破坏,由此造成的损失不容忽视。目前,解决这一问题的一般方法是对其转子进行高精度的动静平衡[1]。由此,学术界展开了自动平衡课题的研究。球式自动平衡装置是根据柔性转子和弹性支撑的特性,不需要外部提供任何能量,只利用系统响应所形成的能量来驱动滚球的移动和分布,从而自动地消除转子的不平衡。球式自动平衡装置对于运动在过临界转速下的旋转机械有较好的减振效益[2]。
以往研究中,借助数值分析方法求解球式自动平衡装置运动微分方程的结果不够直观,并且无法直接观察到其滚球的运动状态及圆盘角速度和圆盘中心轨迹等。
根据球式自动平衡装置的数学模型,借助Visual Basic 6.0平台设计数值仿真系统,实现了球式自动平衡装置仿真结果的动态可视化。考虑到在仿真过程中滚球会发生碰撞,将采用经过碰撞调整的适用于本数学模型的4阶龙格—库塔法求解。
1 球式自动平衡装置的数学模型
球式自动平衡装置的工作原理是转子在过临界转速下旋转时,转子内滚球的位置将自动的受转子机械振动相位的影响,移动到偏心质量的另一边,一定程度上抵消偏心质量所产生的离心惯性力,从而起到减振的作用[2]。
球式自动平衡装置的主要结构如图1所示,一个转盘固定在一根转轴上,转盘滚道内装有若干滚球,其中转盘中心位于O点,G处为不平衡质量,偏心距为e,滚球在半径为R的滚道上运行,刚度和阻尼简化到水平和竖直方向上。在建立数学模型时,将其结构简化为转盘和滚球两部分,并做如下假设:
1)转盘为均质圆形薄盘;
2)转速视为按给定的函数变化;
3)球与滚道之间无相对滑动;
4)转盘处在水平方向,不考虑轴向运动及重力影响。
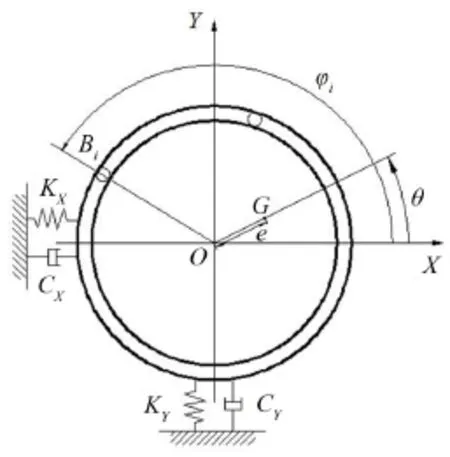
图1 球式自动平衡装置结构图
所采用的符号表示如下(单位均采用国际标准单位):
XOY:系统整体坐标系。以X和Y表示转盘中心O的坐标。
Kx、KY:X方向的刚度系数和Y方向的刚度系数;CX、CY:X方向的粘性阻力系数和Y方向的粘性阻力系数。
θ:不平衡质量相对于X轴的转角;
φi:第i个滚球的转角。
β0:滚球的滚动摩擦系数;β1:滚球的粘性阻尼系数。
M:系统总质量,m1、m2、m3、m分别为偏心质量、转盘质量、电机质量和滚球质量。
I、I1、I2:滚球的转动惯量、偏心质量的转动惯量、圆盘的转动惯量。
R、r:滚球转动半径和球径。
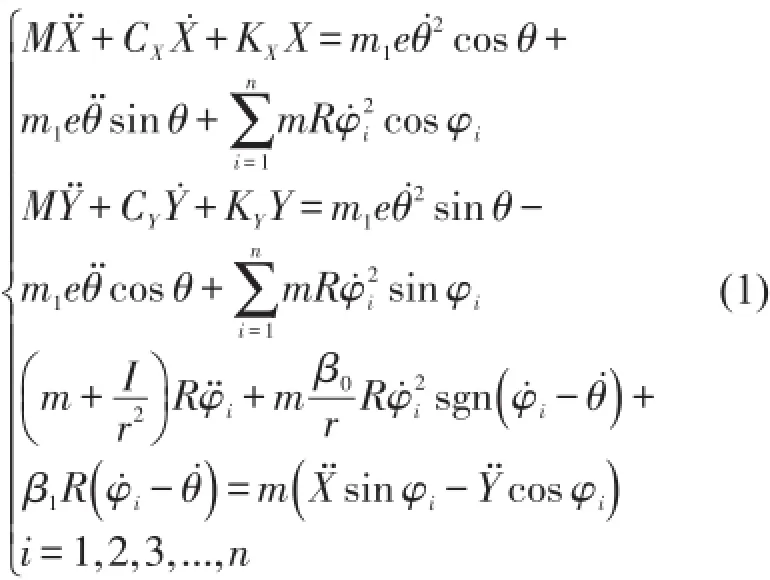
利用拉格朗日运动微分方程建立球式自动平衡装置的数学模型,其推导过程参照文献[3]第17至19页,得到系统微分方程如下
2 数值仿真系统的实现
采用四阶龙格—库塔法对上节给出的数学模型进行数值分析求解。数值分析需要借助编程平台,对于一般的数学计算,首选Matlab,但Matlab在可视化上不如通用编程语言灵活,因此本文的计算将采用VB,利用VB强大的图形化功能增加仿真结果的直观性,实现滚球运动状态的动态呈现。仿真程序流程如图2所示。
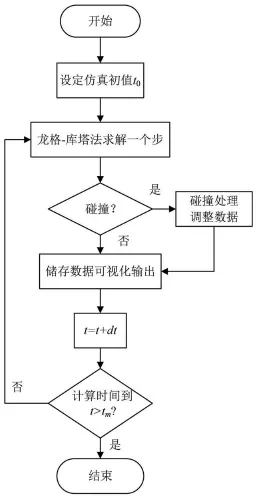
图2 仿真程序流程图
2.1系统微分方程化简
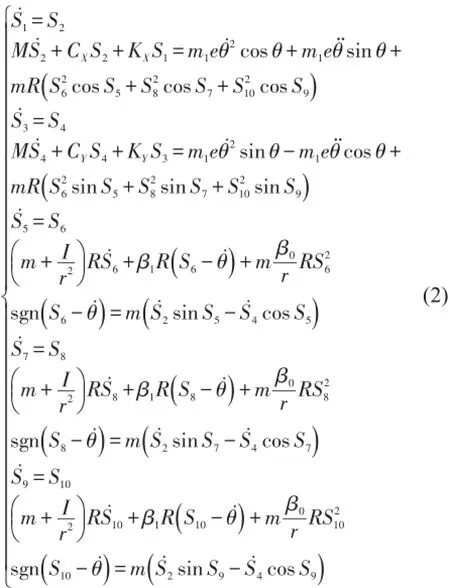
将通用运动方程(1)化为便于仿真的通用格式1阶微分方程组,以3球为例,取
将定义的广义坐标代入式(1)得到式(2),观察可知,式(2)为已知初值的通用格式1阶微分方程组,可以采用龙格—库塔法求解。
2.2仿真参数
仿真参数依据实验室原有的实验设备确定,见表1。系统中仿真参数为变量,可通过改变仿真参数进行不同情况的仿真。
2.3仿真算法
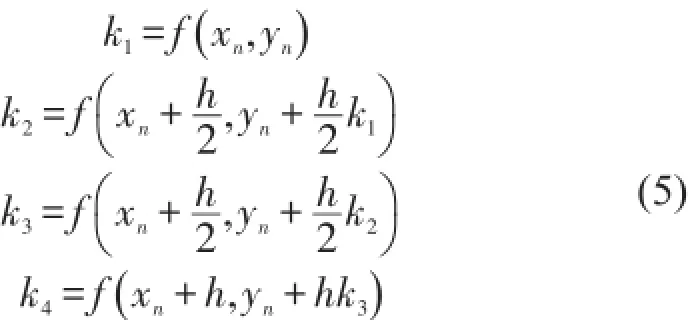
仿真算法为4阶龙格—库塔法[4]。对于通用格式的1阶微分方程组,如果初值可以确定,借助微机可以采用此算法求解。对于初值问题

4阶龙格—库塔法求解下一步的方法为

上式中h为步长,ki为
2.4碰撞调整
球式自动平衡装置运动过程中的滚球可能会相撞,因此在龙格-库塔法一个步的求解后,需检查球的位置是否干涉,如果干涉须做碰撞处理。对于在滚道中运动的滚球,由于存在摩擦和粘性阻尼,可视为完全非弹性碰撞,即指滚球碰撞结束后,这一瞬间内两物体的运动状况完全相同,拥有相同的速度[5]。
两球碰撞的判断条件为两球夹角φ满足

完全非弹性碰撞后的结果为两球分别往各自两侧移动α

两球速度均变为

2.5数值仿真系统界面
基于VB设计的数值仿真系统主要输出有X和Y方向的振幅、转盘中心的运动轨迹、各滚球相对不平衡质量的转角、滚球在转盘内运动的动画等。
该仿真系统具备计算0个滚球(视为不平衡转子)和1~3个滚球(视为不同的球式自动平衡装置)系统各项参数的能力。
软件界面分三列,第一列四幅图显示振幅,分别为无滚球和有滚球情况下X和Y方向的振幅输出,在无滚球计算完成后,保留振幅输出图像,便于同有滚球的时候形成振幅对比。中间列第一幅图为角速度输入,中间列后三幅图为各滚球相对不平衡质量的转角。最右边列第一幅图动态显示滚球在转盘内的运动情况,本模块可以根据计算得到的转角,以动画的方式显示滚球运动情况,不平衡质量在X轴正向,滚球以转盘为参考系运行,最右边列下面一幅显示转盘中心运动轨迹,也就是振幅在XY平面内的点云图像。右下角的四个按钮可以根据滚球数点击,用来启动仿真。

表1 仿真参数(未注单位为国际单位)
3 仿真系统的仿真结果
根据自同期理论[6]预测滚球在不同转速下的位置:当转速较低时,滚球向偏心质量一侧移动,此时会造成转子振幅增大;当转速大于1阶临界转速时,如果只是略大于,可能会产生自激振荡,如果大得多,则滚球开始远离偏心质量,达到平衡的目的[7]。下面分析四种不同滚球数目下的输出,与自同期理论形成对比,验证仿真系统结果的可信性。
残留振幅是衡量过临界转速时移动物体对不平衡转子减振能力的标志,最大振幅是决定转子启动时能否安全通过共振区的一项指标,因此最大振幅、残留振幅作为评价自动平衡回转机械工作机理影响因素的指标[3]。由于X、Y方向振幅规律相近,本文仅分析X方向振幅。
为了使仿真尽量接近实际情况,角速度输入采用从0以5 s时间加速到25 Hz后匀速转动。仿真时间持续30 s,每0.008 s取一个步,总共3 750个计算步。这里指出,仿真步的大小要选择合适,步太大影响结果的准确性,步太小会导致仿真时间过长。
3.1不装滚球
不装滚球下的球式自动平衡装置可视为普通不平衡转子,其水平方向的振幅如图3所示,从图中的振幅走向可以看出,刚开始由于转速不大,转子振幅较小,之后转子转速达到一阶临界转速后通过共振区,达到最大振幅,最后逐渐衰减为稳定值。最大振幅值和残留振幅值可从图上获得(水平方向最大振幅由Xmax表示,残留振幅由Xbal表示)。

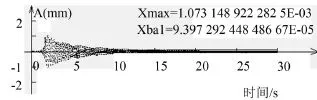
图3 未装滚球的计算结果
3.2 1个滚球
球式自动平衡装置内装有1个滚球的情况如图4所示,滚球的原始位置相对不平衡质量的转角为0,其X方向的振幅如图4(a)所示。从图中的振幅走向可以看出,刚开始由于转速不大,转子振幅较小,之后转子转速达到1阶临界转速后通过共振区,达到最大振幅,该振幅超过了不装滚球时的最大振幅,说明此时滚球加大了不平衡量,最后逐渐衰减为一个稳定值,该稳定值低于未装滚球时的残留振幅,说明滚球已经起到平衡不平衡质量的作用,符合自同期现象。图4(b)显示转盘的中心运动轨迹。最大振幅值和残留振幅值具体数值如下
Xmax=1.699×10-3m,Xbal=2.270×10-6m滚球最后相对不平衡质量的转角为φ1'=-53.396 rad,化为角度,得滚球与不平衡质量最后的夹角为180.63°,接近理想角度180°。图4(c)中的区域动态显示滚球在转过8圈后,缓慢移动到最后停留位置。
3.3 2个滚球
球式自动平衡装置内装有2个滚球,滚球初始转角为0和π,基本情况同装有1个滚球时相似,区别是两个滚球可能会发生碰撞,上述初值下未发生碰撞,最大振幅同样大于不装滚球时的振幅。振幅稳定值低于未装滚球时的振幅稳定值,减振效益十分明显,说明滚球已经起到平衡不平衡质量的作用。最大振幅值和残留振幅值及滚球停留位置具体数据如下

化为角度,得滚球1和滚球2与不平衡质量最后的夹角分别为118.34°和238.78°,分别接近理想角度120°和240°。球式自动平衡装置装有2个滚球的计算结果如图5所示。

图4 装有1个滚球的计算结果
3.4 3个滚球
球式自动平衡装置内装有3个滚球的情况如图
6所示,滚球初始转角为0、2 π/3和4 π/3,其X方向的振幅如图6(a)所示。从图中的振幅走向可以看出,刚开始由于转速不大,转子振幅较小,之后转子转速达到1阶临界转速后通过共振区,达到最大振幅,由于初始位置比较理想,该振幅略低于不装滚球时的最大振幅,实际上此时滚球加大了不平衡量。最后逐渐衰减为稳定值,该稳定值低于未装滚球时的残留振幅,说明滚球已起到平衡不平衡质量的作用。这里指出在上述初始转角下,滚球之间有相互碰撞。最大振幅值和残留振幅值及滚球转角具体数值如下
图5 装有2个滚球的计算结果
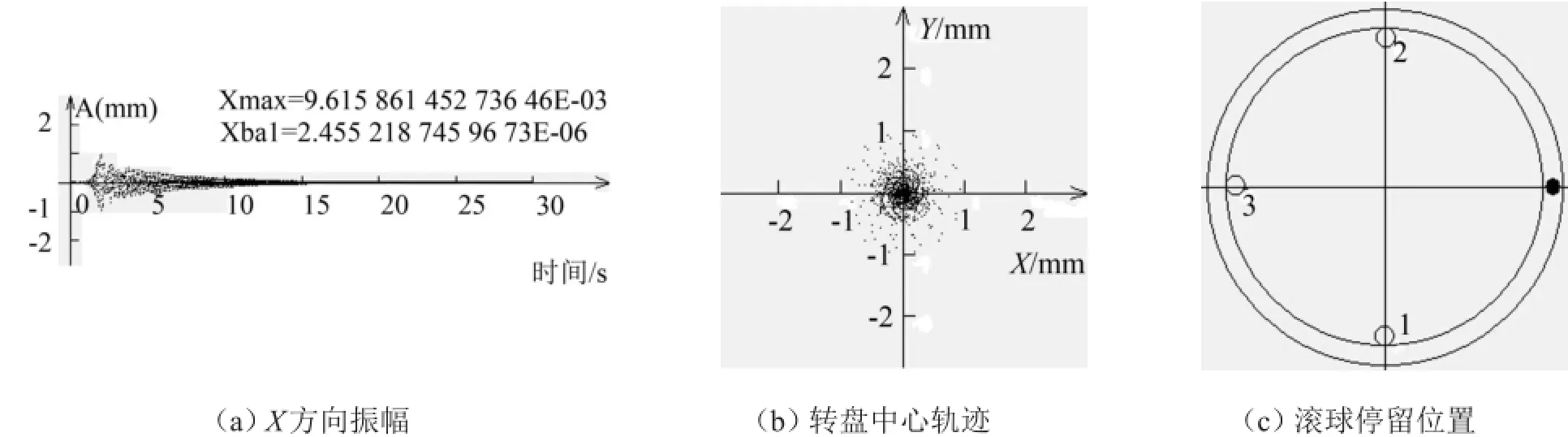
图6 装有3个滚球的计算结果
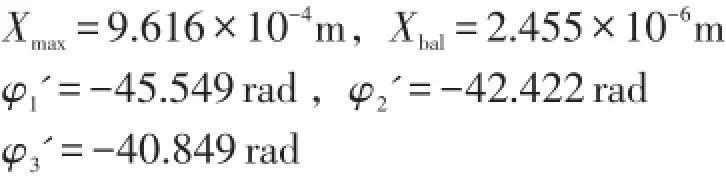
化为角度,得滚球1、滚球2和滚球3与不平衡质量最后夹角分别为270.23°、89.40°和179.52°,接近理想角度270°、90°和180°。图6(c)显示了滚球的最后停留位置。
4 结语
基于VB设计的球式自动平衡装置数值仿真系统,通过参照(未装滚球)和三组带滚球的仿真,得到的仿真结果与自同期理论一致,不平衡转子的振幅都得到了有效的衰减,减振效益达到40倍左右。
仿真过程中发现,减振速度与仿真步的大小有关,仿真步越小,滚球达到稳定位置的时间越长;残留振幅与仿真时间有关,仿真时间越长,残留振幅越小。
该数值仿真系统实现了球式自动平衡装置仿真结果的动态可视化,增加仿真结果的直观性,实现了滚球运动状态的动态呈现。通过修改仿真系统的参数,可以很便捷的分析仿真结果的影响因素,包括初始位置、滚道摩擦系数、滚道阻尼系数、转子旋转加速度等。
[1]刘文倩,谭青,谢燕琴,等.自动平衡装置减振效益分析[J].噪声与振动控制,2010,30(4):153-157.
[2]谭青,周铁,黄秀祥.球式自动平衡装置的数值仿真与实验研究[J].噪声与振动控制,2008,28(3):142-145.
[3]周铁.内装滚球转子自同期现象的理论与实验研究[D].长沙:中南大学,2008.
[4]Brooks Cole.冯烟利译.数值分析[M].北京:高等教育出版社,2005.
[5]哈尔滨工业大学理论力学教研室.理论力学(第七版)[M].北京:高等教育出版社,2010.
[6]井上顺吉,荒木嘉昭.振动机械的自己同期化研究(日文)[C].日本机械学会论文集,1967,33(2).246.
[7]杨义蛟,谭青,周铁.自动平衡回转机械的工作机理研究[J].机械设计与研究,2009,(4):33-36.
Design of Numerical Simulation System of Ball-type Automatic Balancers
TANQing,REN Zhi-xiang,WEILai
(College of Mechanical&Electrical Engineering,Central South University,Changsha 410083,China)
The Matlab code is used very often in numerical simulation of ball-type automatic balancers.But the results are neither intuitive nor interactive.In this paper,a new dynamic simulation system with VB platform was designed.The mathematical model of the ball-type automatic balancers was solved numerically using Runge-Kutta method.The simulation results show that the system enables interactive visualization and intuition of the simulation results and realizes the dynamic presentation of the state of dynamic motion of the balls.The simulation results obtained by the numerical simulation system of the ball-type automatic balancers are consistent with those of the self-synchronization theory.The amplitude of the unbalanced rotor is reduced effectively.
vibration and wave;ball-type automatic balancer;mathematical model;numerical simulation system;vibration reduction
TP311;TH113.1
ADOI编码:10.3969/j.issn.1006-1335.2015.05.009
1006-1355(2015)05-0048-05
2015-02-12
任志湘(1990-),女,湖南省岳阳市人,硕士生,主要研究方向:自动平衡装置虚拟实验平台。
Email:jds-share@163.com
谭青(1955-),男,博士生导师。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
阅读与作文(英语高中版)(2021年5期)2021-06-30
模具制造(2019年10期)2020-01-06
小朋友·快乐手工(2017年8期)2017-08-10
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07