一类不确定非线性系统的全局输出反馈镇定*
2015-08-27 08:33石啊莲任舒翼
贵州大学学报(自然科学版) 2015年5期
石啊莲 ,任舒翼
( 1. 齐鲁师范学院数学学院,山东济南250013; 2. 山东广播电视大学公共基础教学部,山东济南250014)
有限时间镇定是Peter Dorato 在上世纪70 年代提出的概念,而后这类问题得到了广泛的关注[1-3],形成了几种设计有限时间镇定控制器的方法,如有限时间镇定的Lyapunov 理论、加幂积分器的方法等。而全局输出反馈镇定问题[4-6]也是学者们研究的热点之一,并取得了丰硕的成果。研究表明,非线性系统的有限时间镇定问题意义重大,具有更好的鲁棒性能[7]。本文在这样的研究背景下考虑了一类不确定非线性系统的输出反馈镇定问题。
1 系统描述
考虑如下不确定非线性系统
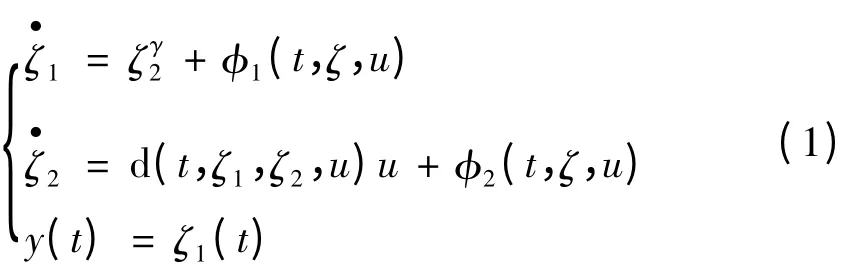
这里ζ = (ζ1,ζ2)T∈R2,u ∈R,y ∈R 分别是系统的状态、系统输入和输出。φi,i = 1,2 是连续可微函数,且φi(0)= 0,0 <γ <1 为奇整数率。
本文的主要目的是设计如下形式的输出反馈控制器:

使得闭环系统(1)(2)全局镇定,并且在有限时间内(ζ,z)→(0,0)。
首先做出以下假设:
假设1 对∀ζ1,ζ2∈R,有
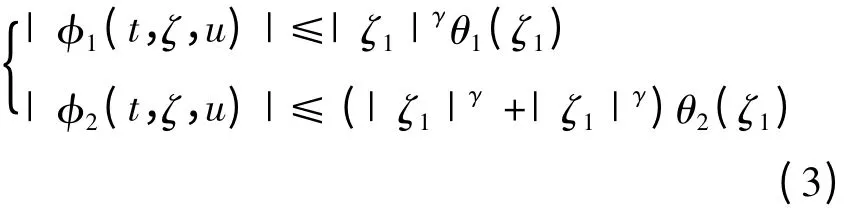
这里θ1(ζ1),θ2(ζ2)为非负光滑函数。
假设2 系统(1)中d(t,ζ1,ζ2,u)满足0 <μ(ζ1)<d(t,ζ1,ζ2,u)<ν(ζ1),这里μ(ζ1),ν(ζ1)为光滑函数。
2 定理及引理
引理2.1 若γ ∈(0,1)为奇整数率,且a ∈R,b ∈R,则不等式| aγ-bγ|≤21-γ|a-b|γ成立。引理2.2 若a ≥0,b ≥0,π≥0 连续,m ∈R,n∈R,则对任意常数c ≥0 有ambnπ ≤cam+n+成立。
引理2.3 对任意的实数0 <τ <1 和t,若γ ∈(0,1)为奇整数率,则有成立。
3 输出反馈控制器设计
定理3.1 在假设1 下,系统(1)有输出反馈控制器

使得闭环系统(1)(2)(4)全局有限时间镇定,这里L(ζ1)为一阶可导的非线性增益函数且
证明 定理证明过程借鉴Backstepping 方法,首先为系统(1)建立一个输出反馈控制率,然后设计一个一维观测器,最后选择观测器增益保证闭环系统全局有限时间镇定。具体过程如下:
(Ⅰ)输出反馈控制器设计

第2 步:选取Lyapunov 函数V2= V1(ζ1)+,对V2求导并由(5)式得:
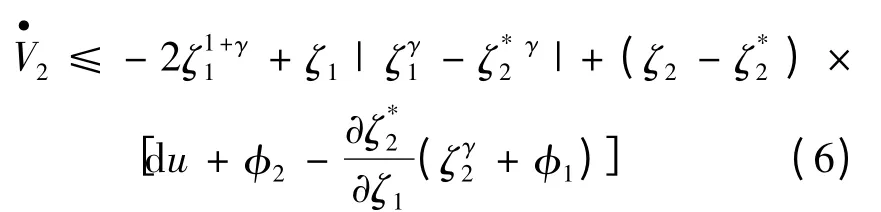
由引理2.1 知:

由(5)式和假设2 得

由引理2.2 得:

取

使得

(Ⅱ)观测器设计
建立一维补偿器:
这里L(ζ1)为待定的非线性增益函数,且>0 。
设e = ζ2- L(ζ1)- z,那么


则

这里bi(ζ1),i = 1,2,3 为光滑函数,常数c1≥0 。
(Ⅲ)确定增益函数L(ζ1)
由于系统中状态ζ2不可测,因此式(9)反馈控制率是不可行的。要得到可行的控制率,用ζ^2= z+ L(ζ1)替换式(7)中的ζ2。则
在新控制率下,式(10)变为

根据引理2.1 和2.2 有
这里b4(ζ1)≥0 是光滑函数。
当σ(ζ1)满足,且时,则由式(15)和式(18)得到
因此

这里c2>0 是常数。由式(19)和式(20)可以推出

由定理2.1 知,闭环系统(1)(2)(4)是全局有限时间镇定的。证毕。
4 结论
本文研究了一类非线性系统的输出反馈镇定问题,由于系统的不可控不可观性,使镇定问题变得复杂。但通过输出反馈控制器与一维补偿器的设计,实现了系统的全局有限时间输出镇定。
[1]Haimo V T.Finite time controllers. The SIAM Journal on Control and Optimization,1986.
[2]Hong Y. Finite-time stabilization and stabilizability of a class of controllable systems. Systems and Control Letters,2002.
[3]Bhat S P,Bernstein D S.Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization,2000,38(3):751 -766.
[4]Kaliora G,Astolfi A,Praly L. Norm estimators and global output feedback stabilization of nonlinear systems with ISS inverse dynamics[J].IEEE T Autom Contr,2006,51(3):493 -498.
[5]DAVLICHKOV S,GE S.Globial stabilization of the MIMO trianglar systems in the singular Case[C]//Proc 46thIEEE Conf on Decision and Control,2007,46(5):259 -267.
[6]Lin W,Qian C J.Adding one power integrator:a tool for global stabilization of high-order lower-triangular systems[J]. Systems &Control Letters,2000,39(5):339 -351.
[7]Hong Y,Jiang Z. Robust finite time control of nonlinear systems with dynamic uncertainty[C]//Proceedings of the 2006 American Control Conference,Minneapolis:2006:4303 -4307.
猜你喜欢
茶叶(2021年1期)2021-04-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
中国医药科学(2017年14期)2017-08-17
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
铁道科学与工程学报(2015年5期)2015-12-24
西藏科技(2015年6期)2015-09-26
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01