
窨井清淤机械手臂的研究
2015-11-18 12:24刘钊李成群董小雷
机床与液压 2015年16期
刘钊,李成群,董小雷
(河北联合大学机械工程学院,河北唐山 063000)
由于我国城市发展迅速,城市人口日益增多,城市排水系统中的问题也变得更为复杂,一旦出现问题既会影响到企业的生产同时也会影响人们的生活。其中城市窨井清淤工作也变得尤为重要,但目前我国在窨井清淤方面还处于起步阶段,多数仍为人工清淤。传统的人工清理方式工作效率低、工作环境约束性大、危险性大,且清掏效率较低[1]。我国仍停留在传统的人工清淤,主要依靠大铁勺、铁叉、夹具等[2]。而机械清淤也主要采用吸污车或绳索升降抓斗清淤,面对窨井中出现的砖块、沥青、树枝等则不宜清除,并且遇到黏稠度较大的淤泥时易附着在抓斗的内部,造成卸载时淤泥的残留问题。
通过分析城市窨井清淤的现状以及清淤的具体环境,设计一种新型的窨井清淤机械手臂已成为人们的需求。窨井清淤机械手臂与传统的人工清淤相比应具备的优点有:工作效率大大提高,减少工人的劳动强度;清淤动作灵活,适应于各种工作环境,避免危险的环境带来的人员伤亡;操作简单,适应于城市窨井中的各种清掏物。在清淤过程中窨井清淤机械手臂应完成窨井内淤泥及其他杂物的收集与卸载任务。
1 窨井清淤机械手臂的组成及工作原理
窨井清淤机械手臂的组成包括减速电机、联轴器、升降液压缸、机械臂连杆、机械臂驱动液压缸、清淤抓斗支架、抓取油缸、抓取活塞杆、连杆、连杆支架、清淤抓斗、淤泥刮板等,如图1 所示。

图1 窨井清淤机械手臂三维图
减速电机下部通过联轴器与升降油缸连接,减速电机箱下端与联轴器通过推力球轴承接触,升降活塞杆与机械臂后座固定。减速电机的旋转可使得整体机构完成水平旋转,升降活塞杆的伸缩可完成机构的整体升降。
机械臂后座与机械臂前座通过机械臂主连杆和机械臂副连杆铰接,构成平行四边形结构的机械臂,机械臂驱动油缸与机械臂后座铰接,机械臂驱动活塞杆与机械臂主连杆铰接。机械臂驱动活塞杆的伸缩控制机械臂的运动,从而调整窨井清淤抓斗的作业半径,并保证窨井清淤抓斗的方向始终竖直向下,便于清淤。
清淤抓斗支架下端与抓取油缸固定,上端可与机械臂固定从而配合清淤抓斗的窨井清淤工作。抓取油缸与抓取活塞杆装配,抓取活塞杆上端与连杆支架固定,连杆上端与连杆支架铰接,下端与清淤抓斗铰接,清淤抓斗与淤泥刮板铰接,同时淤泥刮板上端与抓取油缸固定,抓取活塞杆的伸缩带动连杆的运动从而使清淤抓斗绕淤泥刮板的连接轴转动,完成窨井清淤的动作。淤泥刮板的设计可使淤泥刮板与清淤抓斗之间作相对运动实现淤泥刮板的刮泥动作,既使收集到的淤泥不易溢出,又使淤泥卸载时淤泥抓斗内部不会存留淤泥,清淤彻底从而提高清淤效率。
为了满足窨井清淤机械手臂在清淤过程中的特点及其任务,选用连杆传动和液压驱动方式,避免目前链绳传动全行程处于“漂浮”状态,不利于清淤机械手臂深入窨井淤泥中,液压驱动保证运动中自行润滑具有过载保护能力[3]。
2 平行四边形机械臂结构的模型分析
对上述的平行四边形机械臂结构进行简化分析,得出图2 所示的机构简图。
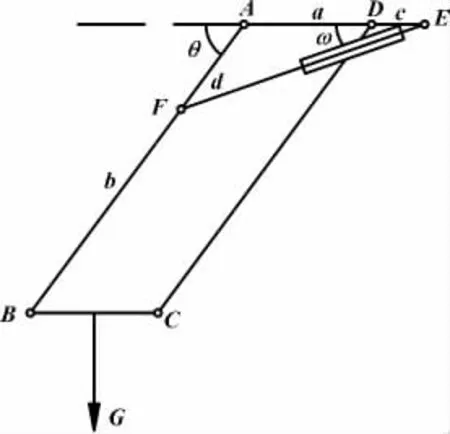
图2 平行四边形机械臂结构简图
图中,a 为机械臂后座铰接点A、D 的距离;b为机械臂主、副连杆的长度;c 为机械臂后座铰接点D、E 的距离;θ 为平行四边形机构旋转角度;ω 为机械臂驱动油缸旋转角度;G 为机械臂受到的载荷。设:AB 杆所受的压力为FAB;CD 杆所受的压力为FCD;机械臂驱动液压缸所受到的轴向拉力为FY。
对平行四边形机械臂机构进行受力分析:
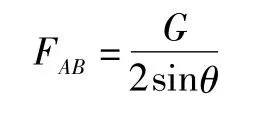
(1) AB 杆所受压力FAB
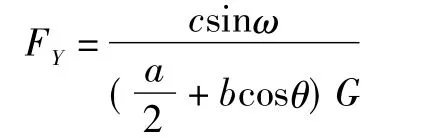
(2) 机械臂驱动液压缸所受到的轴向拉力FY

化简可得:
在机械臂的设计中选择平行四边形机构,可调整窨井清淤抓斗的作业半径,并保证窨井清淤抓斗的方向始终竖直向下。平行四边形机构具有油缸行程短、结构紧凑等特点,应用在窨井清淤过程中,避免机械臂驱动油缸失稳等现象的出现,使得窨井清淤抓斗在工作中稳定可靠。
3 窨井清淤抓斗受力分析
设计清淤抓斗为对称结构,研究清淤抓斗的受力时可对单个清淤抓斗进行分析。单个窨井清淤抓斗的受力分析如图3 所示。其中:F1为清淤抓斗水平切刃受到阻力;F2为清淤抓斗两侧切刃受到阻力;F3为清淤抓斗水平切刃受到摩擦力及淤泥黏着力;F4为清淤抓斗两侧切刃受到摩擦力及淤泥黏着力;F5为连杆受到拉力;F6为抓取液压缸压力;C 为清淤抓斗重力。
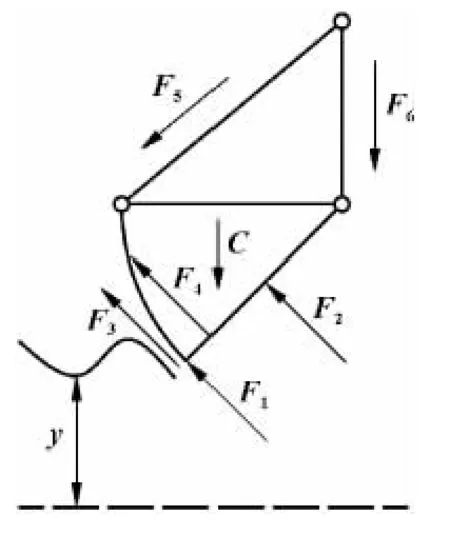
图3 抓斗受力分析简图
清淤抓斗容积为0.2 m3,常见窨井淤泥密度为1 200 kg/m3,可知清淤抓斗载满淤泥时的质量为C'=0.2 m3×1 200 kg/m3=240 kg。
4 窨井清淤机械手臂的液压系统设计
4.1 升降机构液压系统回路
为了使窨井清淤抓斗达到窨井内部淤泥的深度,特设置了升降机构。升降液压缸安装在整体机构上部,其液压原理如图4 所示,通过三位四通换向阀的换向,可以实现升降液压缸的伸展与收缩,从而完成机构的升降。考虑到机构应在清淤过程中保持平稳的运动状态,因此应选用平衡阀来满足要求,保证机构承载时能匀速运动。

图4 升降机构液压系统回路
4.2 机械臂驱动液压系统回路
机械臂驱动液压缸承受载重G 与机械臂连杆重力之和的分力作用。考虑到机械臂应平稳调整窨井清淤抓斗的作业半径,保证窨井清淤抓斗的方向始终竖直向下,因此应采用平衡阀来达到负重平稳的要求,其液压原理如图5 所示,当三位四通换向位于右位,液压缸克服负载重力作功时,液压油直接通过平衡阀中的单向阀做功;当三位四通换向阀位于左位,机械臂缩回时,在受到负载重力作用下,使机械臂下降速度增加,采用平衡阀来达到在负重的同时平稳运动的要求。
图5 机械臂驱动液压系统回路
4.3 窨井清淤抓斗的液压系统回路
清淤抓斗液压系统的主要组成部分包括:液压驱动装置、控制装置和执行装置。驱动装置采用电动机带动液压泵来提供动力,控制装置采用电磁阀来控制液压缸的移动和换向,执行装置为液压缸。
为保证左右清淤抓斗在工作时同步运动,应在液压缸控制油路中设置分流集流阀。为确保清淤抓斗抓取淤泥时不松脱,应设置锁紧回路,即在液压缸承载侧加装液控单向阀。由窨井清淤工况可知液压系统的负载较小,油缸的进程和回程速度基本相同,在具体的清淤工作环境下,可能出现负载变化的情况,因此系统要有调速功能,同时为了保证液压系统的运行安全,采用过载保护装置,并且不同执行装置的工作负载不同,在各回路中要设置减压回路,以保证各部分工作时所需的压力。如图6 所示。
图6 窨井清淤抓斗的液压系统回路
4.4 窨井清淤机械手臂整体液压系统回路设计
根据上述分析,最终确定窨井清淤机械手臂整体的液压原理图如图7 所示。这是一种通过手动操纵来实现多缸各自动作的系统。为了简化结构,系统用一个液压泵给各执行元件串联供油。各串联的执行元件可任意组合,使几个执行元件同时动作。
图7 窨井清淤机械手臂整体液压系统回路设计
5 执行元件设计与选用
5.1 各机构液压执行器的配置及负载分析
图1 所示窨井清淤机械手臂的各工位要求,通过对升降液压缸、机械臂驱动液压缸、抓取液压缸的工作状态以及工位进行液压执行器的配置及其分析,可知整个液压系统的执行件相关运动参数如表1 所示。
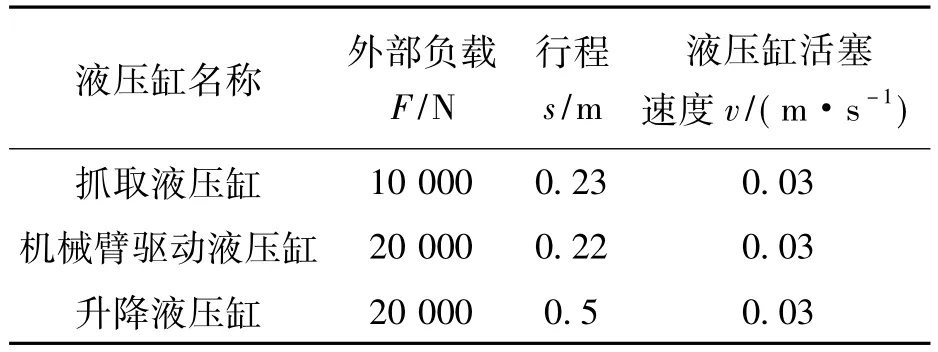
表1 液压系统执行件相关运动参数
5.2 各液压缸技术参数计算
预选抓取液压缸的设计压力p1=10 MPa。抓取液压缸的无杆腔为主工作腔,则可计算出液压缸无杆腔的有效面积:

则液压缸的内径为:

式中:η 为抓取液压缸机械效率,取值为0.9。
按GB/T2348-1993,取标准值D=50 mm,查表可得活塞直d=0.7D=0.7 ×50 mm=35 mm,取标准值d=35 mm。
液压缸作用有效面积为:

液压缸的单程平均速度:
液压缸的实际流量:

液压缸的实际工作压力:
同理可计算出机械臂驱动液压缸与升降液压缸的参数。
6 结束语
研究的窨井清淤机械手臂能够实现窨井清淤作业,提高了清淤的自动化程度,减轻了工人的劳动量,具有实用性。
(1) 设计出的淤泥刮板解决了清淤抓斗卸载淤泥时淤泥的残留问题。
(2) 平行四边形结构的机械臂的设计可调整窨井清淤抓斗的作业半径,并保证窨井清淤抓斗的方向始终竖直向下,便于清淤。
(3) 设计窨井清淤机械手臂的液压系统回路以及选用液压执行元件。
针对窨井清淤机械手臂的研究提出了理论依据及其分析模型。窨井清淤机械手臂将有广阔的应用前景和经济效益,同时也对市政工程建设具有重要意义。
[1]朱保罗.国内外排水管道养护技术比较[J].给水排水,2007(2) :94 -99.
[2]王正刚,朱龙英,葛友华,等.清理垃圾机械手的设计[J].机械设计与制造,2009(7) :65 -67.
[3]何芹,原政军,姚龙元.用于方形物件装卸液压机械手的设计[J].机床与液压,2010,38(18) :38 -40.
[4]成大先.机械设计手册[M].北京:化学工业出版社,2004.
[5]杨文生.液压与气压传动[M].北京:电子工业出版社,2007.
[6]曲继方,安子军,曲志刚.机构创新原理[M].北京:科学出版社,2001.
猜你喜欢
红蜻蜓·高年级(2022年10期)2022-10-24
沈阳理工大学学报(2022年3期)2022-08-11
建材发展导向(2021年19期)2021-12-06
活力(2019年15期)2019-09-25
流体机械(2017年9期)2017-02-06
中国新技术新产品(2014年21期)2014-03-28
筑路机械与施工机械化(2014年2期)2014-03-01
中国设备工程(2014年2期)2014-02-28
河南科技(2014年7期)2014-02-27
城市道桥与防洪(2013年5期)2013-03-11
