
交会末段制导引信一体化系统射频成像目标轮廓重构方法
2015-11-19 05:57王萱邓甲昊李辉陆满君
兵工学报 2015年9期
王萱,邓甲昊,李辉,陆满君
(1.北京理工大学机电学院,北京100081;2.北京理工大学机电动态控制重点实验室,北京100081;3.上海无线电设备研究所,上海200090)
交会末段制导引信一体化系统射频成像目标轮廓重构方法
王萱1,2,邓甲昊1,2,李辉1,2,陆满君3
(1.北京理工大学机电学院,北京100081;2.北京理工大学机电动态控制重点实验室,北京100081;3.上海无线电设备研究所,上海200090)
目标实时精确识别与定位是实现制导引信一体化(GIF)技术的关键,对提高弹药末制导及起爆控制精度具有决定性的意义。以射频成像GIF体制为对象,基于射频成像原理及目标特性,结合计算几何和统计学原理,针对交会末段提出了一种目标轮廓重构方法。该方法通过灰度映射变换,提取仅包含目标信息的灰度值,显著降低了数据量,同时增强了图像对比度;在阈值分割、角点提取的基础上,应用统计学剔除异常值的方法滤除背景噪声并抑制目标边界干扰;利用凸壳技术实现目标轮廓重构,得到可以完全覆盖目标区域的最优凸多边形作为目标轮廓。理论分析和仿真结果表明,该方法时间复杂度低,实时性好,可实现目标的精确识别与定位。
兵器科学与技术;导航制导;制导引信一体化;目标识别;异常值点;计算几何;凸壳
0 引言
制导引信一体化(GIF)技术[1]是以提高弹药作用可靠性及引战配合效率为目的,基于信息共享、结构兼容、部件共用、功能互补原则,在综合考虑引信与导引头在工作体制、探测视场、交会状态、目标及环境信息特征情况下,进行结构与电路融合设计,实现对目标准确识别、有效跟踪、实时精确起爆的一体化系统设计技术。GIF技术的本质是一种综合利用弹上信息的起爆控制技术[2],它充分利用导引系统所测数据为引信提供脱靶量及方位信息,使其准确决策最佳起爆时空点并控制起爆。GIF技术可以更好地适应复杂的弹目交会情况,提高可靠性与引战配合效率[3]。
国内外对于GIF技术的研究中,雷达成像体制的GIF技术出现较早也较为成熟[4]。20世纪90年代初,美国的中国湖海军武器试验中心和美国导航与控制公司开展了雷达体制的GIF设计、仿真和分析,美国波音公司的PAC-3和SITES项目都采用了主动雷达成像体制的GIF技术。射频成像技术由于抗干扰性好,能够适应多种复杂探测环境,具有全天时、全天候的工作能力,成为GIF研究的热点。然而,在探测末段,由于目标图像快速增扩、探测器与目标相对位置剧烈变化、近场噪声干扰增强和目标形状畸变,目标图像通常是不规则的图形或者只是模糊的斑点,甚至是一团无法分辨的模糊区域,很难实时获得目标的清晰轮廓。然而,为了实现精确的起爆控制,瞄准点的精确选择是精确起爆控制的前提,而准确地确定目标轮廓又是实现瞄准点精确选择的前提。因此,为了提高起爆控制精度,目标轮廓获取在制导[5]末段,尤其是GIF系统末制导跟踪和引信作用段内具有重要的意义。
对于目标边缘轮廓提取主要有如下3类方法:
1)传统边缘检测算法[6],即差分边缘检测方法。该方法主要通过图像灰度剧烈变化进行边缘检测。常见的算法主要有Robert算子、Prewitt算子、Sobel算子、Laplacian算子,这些经典的边缘检测算子运算简单,但精度相对较低,抗干扰能力一般,因此不适用于末段复杂的探测环境。
2)基于边缘检测抽象建模的算法[7]。该类算法主要有Canny算子、LOG算子等。新算法的开发使边缘提取的精度大大提升,但算法复杂度也相应增加,同时对图像预处理要求也较高。
3)多学科理论融合的新型算法。该类算法主要应用新理论和思想,进行图像边缘检测,如小波理论、形态学、模糊数学、统计学、神经网络、遗传算法等。文献[8]提出了基于力场转换理论的图像检测方法,可实现对粗大边缘的检测;文献[9]则基于小波理论,提出应用哈尔小波变换分类实现边缘提取。然而,新理论的引入再次增加了算法的复杂度,很难满足GIF技术对实时性的要求。
本文针对现有目标轮廓提取算法难以在弹道末段对高机动复杂目标实时精确识别定位的问题,提出了基于射频成像的GIF系统末段目标轮廓重构方法。其基本思想是,将目标识别转化为对覆盖在目标上点的识别,将排除干扰物转换为统计学中异常值点的剔除,将目标轮廓提取转换为计算几何中凸壳的构造,最终实现实时精确的目标识别定位。
1 基于计算几何的GIF技术末段目标轮廓定义
为解决目标轮廓提取的精度和实时性问题,基于计算几何进行弹道末段目标轮廓定义。在计算几何学中,凸壳是最普遍、最基本的一种结构。对于Ed(d维欧几里德空间)中的点集S,CH(S)即表示点集S的凸壳,亦即包含S的最小凸集,BCH(S)表示S的凸壳边界。由于BCH(S)为凸多边形,其顶点数m和点集S中点的数目n有如下关系:
当n→∞时,令k维空间中n个点的分量是独立地从任何连续分布的集合中随机选取的,则其凸壳的顶点数为

因此,用凸壳代替点集,可使问题简化,并减少数据存储量。
本文受周培德最小几何覆盖研究的启发,构造可以覆盖目标区域的最小凸多边形,定义该凸多边形为等效的目标轮廓。结合本文的应用背景,针对GIF系统探测末段的机动目标,在t时刻获取目标上的点构造凸壳,定义该凸壳边界为该时刻的目标轮廓。该凸多边形与目标原始形状之间存在差异,但却可以完全覆盖目标。对于GIF系统,目标轮廓的细节信息对于目标毁伤没有决定性的意义,且由于末段的复杂环境,目标图像畸变,无法获得目标实际轮廓。对于GIF系统探测末段的高机动目标,本算法可以实时获取最优凸多边形覆盖目标,实现对目标的精确定位跟踪及有效毁伤。
2 目标轮廓构造算法
本文提出的目标轮廓构造算法流程如图1所示。对探测器获得目标图像进行特性分析及简单预处理;根据雷达图像特点进行灰度映射变换;采用Ostu方法进行区域分割;对目标区域进行角点提取;采用统计学方法进行异常值点剔除;根据最终获得的点集构造凸壳,即得到目标轮廓。

图1 目标轮廓构造算法流程图Fig.1 Flow chart of algorithm for target contour construction
2.1 目标特性分析
在末段复杂的探测环境下,目标形状通常不规则且边界模糊。特别地,在弹目交会末段[10],弹目交会姿态复杂,易受噪声干扰,目标轮廓提取较为困难。
如图2所示,对于雷达图像,目标区域亮度往往较大,背景相对较暗,即目标区域主要集中在图像灰度值数值较大的部分,剩余大部分的背景灰度信息或纹理信息对目标提取没有意义。因此,可以忽略大部分与目标区域无关的信息,减少运算量,提高算法实时性。
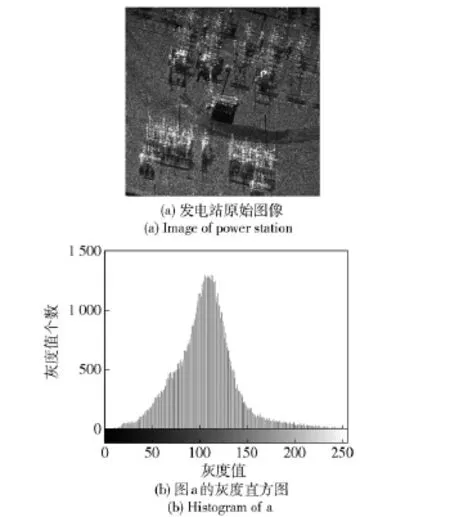
图2 典型雷达目标图像特性分析Fig.2 Typical radar target image analysis
2.2 图像压缩与增强
对图像进行去噪等预处理后,根据2.1节的分析,只需提取灰度图像中感兴趣的区域,即包含目标信息的部分。设原始图像的灰度信息矩阵为A,基于大量雷达图像灰度直方图对比分析,仅提取并保留图像中目标区域信息,即[150,255]范围以内的灰度信息,具体范围会根据不同的图像有所不同,但所保留的范围一定包含在[150,255]范围内。该范围内信息小于灰度信息总量的40%,并将其映射到[0,255]范围内。映射按照幂律变换进行:

式中:c、r为正常数。
算法仅提取图像中有用数据忽略大量无用的细节信息,实现图像压缩;映射变换降低了图像灰度值分布的复杂度,增强对比度。
2.3 目标区域提取
采用Otsu方法中的最佳全局阈值对滤波后的图像进行分割,对灰度图像中256个不同灰度级,得最佳阈值k*.对输入图像f(x,y)根据(3)式分割可得输出图像g(x,y):

角点检测使用laplacian算子结合偏微分方程式进行。对提取的角点,利用统计学中剔除异常值点的方法,通过对所有角点x、y坐标值,距均值点的欧氏距离、相关性等进行统计学分析,剔除异常值。除借用格拉布斯准则、狄克逊准则进行异常值剔除外,本文设计以下两个主要步骤,针对目标与背景干扰噪声的特点,进行异常值点剔除。
图3所示为基于GIF系统的导弹弹道末段,目标进入制导盲区前某时刻目标在视场中的情况,以优选法为指导,设计异常值点排除准则,提高判别效率。取图示0.618D作为目标上两点之间最远距离。因此,与中心点(均值点)距离大于·0.618·D的点视为干扰噪声或假目标。
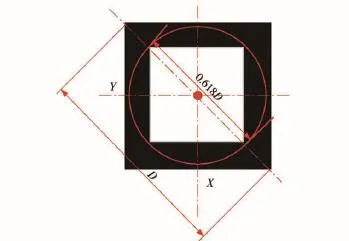
图3 GIF系统弹道末段目标在视场中的大小Fig.3 Size of target in FOV at GIF terminal phase
步骤1:去除距目标较远处的干扰。所有n个点x和y坐标的平均值为(x0,y0),计算所有n个点到该均值点的距离di,i=1,2,…,n,令(X、Y为图像最大边界尺寸),剔除满足{(x,y)|di≥0.309D}的角点。
步骤2:去除目标附近干扰。剩余n′个点x和y坐标的平均值为,计算所有n′个点到该均值点的距离,计算其中xmax,ymax和 xmin,ymin,令,剔除满足的角点。
2.4 凸壳构建
经过2.3节处理,剩余角点全部覆盖在目标区域或在目标区域边界上,因此,根据这些点所构造的凸壳可完全覆盖目标区域,且是能覆盖目标区域的最小凸多边形,利用Matlab软件编程实现快速凸壳构建。在探测末段,所得凸壳可作为目标近似轮廓,并实现目标的实时精确检测和定位。
2.5 算法时间复杂度对比分析
对于预处理后的图像进行角点提取并进行凸壳构造,该过程运算量小,速度较快。由于对图像进行边缘提取时同样需要进行图像增强去噪等预处理,因此,只考察图像预处理后的运算复杂度,并将本算法与边缘提取算法复杂度进行比较。
对于本算法:角点提取复杂度为Tj(n);对于k个角点的情况,2.3节中对异常值剔除的方法可以在O(k)时间内完成;快速凸壳构造的时间复杂度为O(klog2k).令T1为该算法的复杂度,即

式中:k≪mn.
对于像素数为m×n的图像,角点提取算法中最高频度为

因此,Tj(n)=O(mn),由于k≪mn,则

根据文献[11],对于m×n的图像,任何边缘提取算法复杂度T2都具有平凡下界为O(mn),即T2>O(mn)恒成立。
显然,T1<T2,本文提出的边缘重构算法相对于边缘提取的复杂度低,实时性较好。
此外,针对目标重构方法,文献[12]和文献[13]分别采用遗传算法和粒子群算法进行目标轮廓重构。遗传算法的时间复杂度近似为O(n2),粒子群算法的时间复杂度为O(KMN′)(K为迭代次数,M为粒子个数,N′为维数)。Adam等[14]采用网格方法结合傅里叶变换进行目标轮廓重构,单纯考虑传统网格算法,对于二维数据,其时间复杂度为O(n3/2).显然,这几种算法相比凸壳构造更复杂,适用于医疗图像等实时性要求不高的情况,但达不到交会末段目标识别定位对实时性的要求。
理论分析表明,本算法具有较低的时间复杂度,适用于复杂的末段探测环境并可实时获取目标轮廓,具有较好应用前景和实用价值。
2.6 算法精度影响因素分析
根据算法设计原理,分析目标轮廓重构精度和定位精度,首先要进行算法各步骤的精度分析[15]。2.6.1 图像处理引入的误差
算法只提取并保留[150,255]范围内的灰度信息值,选择γ>1进行映射变换,并提高分割阈值。这样可以抑制目标周围干扰噪声,同时也腐蚀了目标轮廓细节,导致目标区域缩小。然而,目标图像缩小后仍在原始目标区域内,在一定范围内,不会影响目标定位精度。
2.6.2 目标区域提取精度分析
剔除异常值采用统计学方法进行,针对步骤1,当目标偏离视场中心,目标上靠近视场边界处的点被判为异常值点的概率较大;对于步骤2,距目标相对较远,但没有在步骤1被剔除掉的异常值点就会导致目标中心位置偏移,影响定位精度。
2.6.3 凸壳构建精度分析
根据凸壳质心进行目标定位跟踪,将ti时刻获取的质心作为此时目标中心位置进行定位,设质心坐标为(xi,yi),此时目标实际质心为(xc,yc).显然,(xi,yi)与(xc,yc)存在偏差。但是本文所设计的算法可以确保(xi,yi)在目标上,随着飞行器姿态调整,最终(xi,yi)会趋近于(xc,yc),实现目标有效毁伤。
根据以上分析,用于构造凸壳的点,对算法精度影响较大[16]。设定探测末段目标轮廓重构方法的精度评价标准。令N=用于凸壳构建的点总数,N1=N中覆盖在目标上的点的总数,识别效率为η,则

式中:η越大,目标定位越准;当η≤50%时,会导致目标丢失或较高的脱靶率。
3 实验与结果分析
针对射频成像GIF技术,选取真实雷达目标图像,进行实验,同时将该算法与典型边缘提取算法进行比较,验证算法的实时性和可靠性。
3.1 算法实现
本文以目标轮廓复杂且在弹目交会过程中机动性较大的飞机为典型目标(如图4(a)所示),利用Matlab软件绘制飞机目标雷达图像(见图4(b))的灰度直方图(如图4(c)所示)。
提取并保留图像中A′⊇[160,255]范围内的灰度信息,并将A′映射到新矩阵B⊇[0,255]中。按照幂律变换进行映射,当γ=1时,为线性映射,映射结果如图5(a)所示。设计幂律函数,取γ=2>1,映射被加权至较暗的输出值(如图5(b)所示)。此时,对比度相对于γ=1时更高,图像中所留下的白色亮斑基本都存在于目标及地面较强干扰物上。
对映射后的图像5(b)进行灰度值分析(如图5(c)所示),与原始图像的灰度直方图(见图4(c))进行对比可见,灰度值分布复杂度明显降低,数据量小于原始数据的1/3,实现图像压缩和对比度增强。
最佳阈值为k*=85,阈值分割后结果如图6所示。
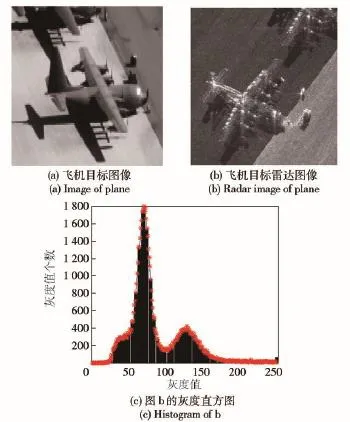
图4 飞机目标原始图像Fig.4 Raw images of plane
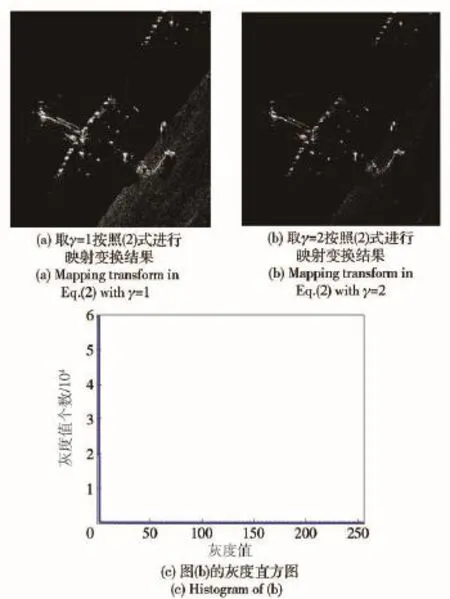
图5 数据压缩与图像增强Fig.5 Results of image Compression and Enhancement
点检测结果如图7所示,得到42个角点。通过图7中角点所在区域与目标位置对比,目标图像右上方干扰物(对应于图7右上角处的点)及机头附近的干扰物,对目标轮廓提取造成干扰,利用统计学原理及本文设计的异常值点剔除方法,异常值剔除结果如图8所示。
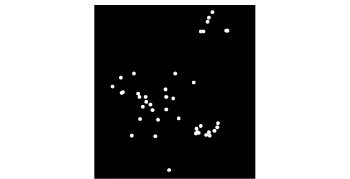
图6 阈值分割后二值化结果Fig.6 Target area extraction
图7 角点提取结果Fig.7 Target area extraction

图8 剔除异常值点Fig.8 Excluding outliers
剩余29个角点全部覆盖在目标区域或在目标区域边界上,利用Matlab软件,构建一个可以完全覆盖目标区域的最佳凸壳(如图9(a)所示),该凸壳为凸八边形。如图9(b)所示,将该凸多边形与原目标图像对照可得,在探测末段,该多边形可表征目标区域轮廓和位置。
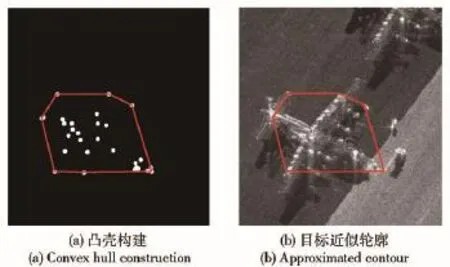
图9 目标轮廓重构Fig.9 Target contour reconstruction

图10 应用典型算法进行边缘检测Fig.10 Edge detection of typical methods
3.2 算法精度及实时性分析
本文所设计的算法主要针对于射频成像GIF技术的应用,可实现目标轮廓的提取,进行实时精确的GIF引信起爆控制。
3.2.1 算法精度分析
对图6中二值图像,分别采用Robert算子、Prewitt算子、Sobel算子、Laplacian算子、Canny算子与本文设计的算法进行边缘提取。图10所示为Laplacian算子和Canny算子进行目标边缘提取的结果。由于雷达图像含有较多的干扰噪声,目标边缘没有整齐固定的轮廓,图10所示的结果显示应用常规边缘提取算法所得到的目标边缘含有大量的无用信息,虽然保留了目标形状特点,但却对提高GIF技术起爆控制精度、易损部位识别和瞄准点选择没有太大意义,不利于对干扰物的剔除。复杂无用的细节信息也增加了运算量,影响算法实时性。
3.2.2 算法实时性分析
采用美国TI公司的TMS320C6455处理器(时钟频率为1 GHz),在CCS开发环境下计算相关边缘提取算法所需时间,结果如表1所示。

表1 不同边缘提取算法所需时间Tab.1 Time consumption of different edge detectors
算法所需时间计算是基于图6阈值分割后的二值化图像进行的,所有算法针对相同的图像进行边缘提取,其中,本文提出的凸壳重构法还包含了剔除异常值所需时间。由表1可知,本文提出的算法与这些基本的边缘提取算法相比耗时较少,满足交会末段GIF系统的实时性要求。
3.3 算法有效性分析
为了验证算法的有效性,选择如下6种具有代表性的情况,进行仿真实验(实验结果见表2):
1)目标在视场中心位置,且没有明显的干扰物(图11(a)所示);
2)目标在视场中心位置,目标周围存在少量的干扰物(图11(b)所示);
3)目标偏离视场中心,靠近视场边界(右下角),无明显干扰物(图11(c)所示);
4)探测器相对于情况3发生旋转,目标靠近视场边界(左上角),无明显干扰物(图11(d)所示);
5)目标靠近视场边界,且存在明显干扰物(图11(e)所示);
6)目标在视场边界处,且存在较大的干扰物(图11(f)所示)。
由于在飞行末段,GIF系统已经锁定目标,因此,只考虑在视场范围内存在单一完整目标的情况。图11(f)所示是在探测末段出现的极限情况,目标干扰较大,但GIF引信作用段,弹目之间距离较近,视场内不会出现多目标的情况。

表2 实验结果Tab.2 Experimental results
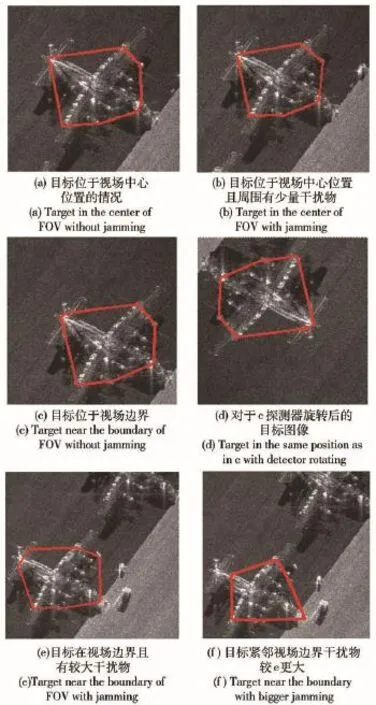
图11 同一目标在不同状态下的轮廓重构结果Fig.11 Contour reconstruction of the same target in different situations
由实验结果可知:目标在视场中的位置及干扰物是影响点提取的主要因素,最终会影响目标轮廓重构精度。分析实验数据可知:目标所在的位置越靠近视场中心,结果越准确;干扰越少,轮廓构造越准确。针对目标在视场边界,且干扰较大的情况,算法识别效率大于80%,可以实现对目标的准确定位。
4 结论
本文提出了一种用于交会末段射频成像GIF系统目标轮廓重构的方法。该方法只利用不足原有图像1/3的数据量,即可完成目标轮廓重构,实现GIF技术精确的目标识别和定位,显著减少数据量,提高实时性。此外,算法避免直接的目标轮廓提取,而对目标图像进行角点提取,将目标识别转化为点的识别;应用统计学原理及优选法剔除异常值点,将干扰物及噪声的抑制转化为对异常值点的剔除,有效抑制背景噪声及干扰。理论分析和实验结果显示该算法能够精确、实时地实现末段目标轮廓重构,效率高,可操作性强,具有广阔的应用前景。
(
)
[1] Chopper K,Jaeger H,Stephens L,et al.Guidance integrated fuzing analysis and simulation[C]∥First IEEE Conference on Control Applications.Dayton,OH:IEEE,1992:750-755.
[2] 孙博,栗金平,郑建强,等.防空导弹红外成像制导引信一体化应用研究[J].弹箭与制导学报,2012,33(1):57-60. SUN Bo,LI Jin-ping,ZHENG Jian-qiang,et al.The re-search on infrared imaging GIF technology of ground-to-air missile[J].Journal of Projectiles,Rockets,Missiles and Guidance,2013,33(1): 57-60.(in Chinese)
[3] Fan M G,Peng Z Y,Luo X L,et al.Prediction of time to go of IR Imaging GIF[C]∥International Symposium on Photoelectronic Detection and Imaging 2011:Advances in Infrared Imaging and Applications.Beijing,China:Chinese Society of Astronautics,2011:81931-81934.
[4] 刘斌,樊养余,周军伟,等.基于成像导引/激光测距的起爆控制算法[J].探测与控制学报,2012,34(2):57-60. LIU Bin,FAN Yang-yu,ZHOU Jun-wei,et al.A burst control algorithm based on imaging guidance and laser ranging[J].Journal of Detection&Control,2012,34(2):57-60.(in Chinese)
[5] Li L J.A new method to select aimpoint for airplane target at end term[J].Proceedings of SPIE,2013,8918,:1-6.
[6] 朱顺安.图像边缘检测并行算法的研究和基于FPGA的实现[D].武汉:中南民族大学,2013. ZHU Shun-an.Parallel algorithm of image edge detection and FPGA-based implementation[D].Wuhan:South-central University for Nationalities,2013.(in Chinese)
[7] Waghule D R,Ochawar R S.Overview on edge detection methods[C]∥International Conference on Electronic Systems,Signal Processing and Computing Technologies.Nagpur:IEEE,2014:151-155.
[8] 曹传东,徐贵力,陈欣,等.基于力场转换理论的图像粗大边缘检测方法[J].航空学报,2011,32(5):891-899. CAO Chuan-dong,XU Gui-li,CHEN Xin,et al.Image edge detection algorithm based on force field transformation[J].Acta Aeronautica et Astronautica Sinica,2011,32(5):891-899.(in Chinese)
[9] Mashford J,Rahilly M,Lane B,et al.Edge detection in pipe images using classification of haar wavelet reansforms[J].Applied Artificial Intelligence,2014,28(7):675-689.
[10] Mahalanobis A.Correlation filters for object tracking target reacquisition and smart aimpoint selection[J].SPIE Journal,1997,3073:25-32.
[11] 周培德,付梦印,黄源水,等.红外图像边缘提取的算法[J].兵工学报,2007,28(5):524-527. ZHOU Pei-de,FU Meng-yin,HUANG Yuan-shui,et al.Algorithms to extract thermal image edge[J].Acta Armamentarii,2007,28(5):524-527.(in Chinese)
[12] Tsang P,Situ W C.Affine invariant matching of broken boundaries based on simple genetic algorithm and contour reconstruction[J].Pattern Recognition Letters,2010,31(9):771-780.
[13] Tsang P,Yuen T,Situ W C.Enhanced affine invariant matching of broken boundaries based on particle swarm optimization and the dynamic migrant principle[J].Applied Soft Computing,2010,10(2):432-438.
[14] Martinez A,Gelb A,Gutierrez A.Edge detection from non-uniform Fourier data using the convolutional gridding algorithm[J]. Journal of Scientific Computing,2014,61(3):490-512.
[15] 谢锐,万显荣,赵志欣,等.外辐射源天地波雷达定位方法及精度分析[J].电波科学学报,2014,29(3):442-449. XIE Rui,WAN Xian-rong,ZHAO Zhi-xin et al.Localization method and accuracy analysis in hybrid sky-surface wave passive radar[J].Chinese Journal of Radio Science,2014,29(3): 442-449.(in Chinese)
[16] 赵连军,刘恩海,张文明,等.单目三点位置测量精度分析[J].光学精密工程,2014,22(5):1190-1197. ZHAO Lian-jun,LIU En-hai,ZHANG Wen-ming,et al.Analysis of position estimation precision by cooperativetarget with three feature points[J].Optics and Precision Engineering,2014,22(5): 1190-1197.(in Chinese)
Terminal Target Contour Reconstruction Algorithm Based on RF Imaging for GIF
WANG Xuan1,2,DENG Jia-hao1,2,LI Hui1,2,LU Man-jun3
(1.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China;2.Science and Technology on Electromechanical Dynamic Control Laboratory,Beijing Institute of Technology,Beijing 100081,China;3.Shanghai Radio Equipment Research Institute,Sanghai 200090,China)
The real-time accurate target recognition and localization are the key factors to implement the guidance integrated fuzing(GIF)technique and enhance the performance of terminal guidance and the accuracy of burst control.A real-time and accurate terminal target contour reconstruction algorithm for RF imaging GIF technique is proposed based on the principle of RF imaging and the target properties.The gray values with target information are extracted by gray mapping transform,thus decreasing the data quantity and the power-law transformation for image enhancement.Based on threshold segmentation and corner detection,the statistical methods are utilized to filter the background noise and suppress the target boundary interference.The target contour reconstruction is achieved by the convex hull technique,which is the optimal convex coveringa target area.Both the simulation and theoretical analysis results show thatthe time complexity of the proposed algorithm is lower,thus it can be used to achieved the real-time and accurate terminal target recognition and localization for RF imaging GIF.
ordnance science and technology;guidance and navigation;guidance integrated fuzing;object recognition;outlier;computation geometry;convex hull
V249.3;TJ765.3
A
1000-1093(2015)09-1624-08
10.3969/j.issn.1000-1093.2015.09.004
2015-01-12
航天科技创新基金项目(SAST201337)
王萱(1988—),女,博士研究生。E-mail:wlcbwx_love@126.com;邓甲昊(1958—),男,教授,博士生导师。E-mail:bitdjh@sohu.com
猜你喜欢
现代电子技术(2022年18期)2022-09-17
计算机仿真(2021年8期)2021-11-17
科学技术创新(2021年25期)2021-09-11
空军工程大学学报(2020年1期)2020-06-12
计算机系统应用(2020年1期)2020-01-15
电子技术与软件工程(2019年9期)2019-07-12
电子技术与软件工程(2018年10期)2018-07-16
女性天地(2009年4期)2009-04-29
女士(2009年4期)2009-04-21
