靶弹飞行安全控制器设计
2015-12-31 11:48叶厚良谌国森
上海航天 2015年3期
叶厚良,谌国森,张 明
(中国人民解放军92941部队,辽宁 葫芦岛 125001)
0 引言
在组织舰载防空武器系统试验时,需要为其提供能逼真模拟敌方来袭反舰导弹的靶弹,以检验舰载防空武器系统的反导能力。靶弹通常由接近退役的反舰导弹改装而成,其飞行控制的可靠性出现不同程度下降,参试时有一定风险。随着反舰导弹向大射程、高速度、低空掠海飞行、大入射角俯冲等方向发展,靶弹暴露的安全问题日益突出。因此,在地面技术准备过程中,需对靶弹进行反复的严格技术检测,以便及时发现并处理存在的安全隐患和故障,确保靶弹性能可靠。但地面技术准备再充分,靶弹在供靶飞行过程中仍可能发生无法控制的情况[1]。一旦靶弹在飞行过程中出现故障或未被成功拦截,可能会误中参试舰船,威胁参试人员安全。尤其在组织小航捷试验时,靶弹的射向与参试舰艇的距离很近,该类事故发生的概率很高。同时,试验航区周边海域布满了重要的工业目标和民用设施,为保护这些目标,需预先划定导弹飞行航区,将试验区域限制在一定范围[2]。若靶弹飞行失控,飞出并坠毁到试验航区外,则会造成不可估量的损失。安全控制成为靶弹供靶飞行首要解决和保障的问题。
在以往的试验组织过程中,为确保供靶安全,常在靶弹上加装被动安控设备,用弹上遥测系统实时回传的靶弹位置等状态信息,由地面判断靶弹飞行是否正常[3]。如判断靶弹位置靠近参试舰船,通过遥测系统向靶弹发出规避爬高命令,由靶弹飞行控制系统控制靶弹爬高飞行,规避参试舰船;如判断靶弹飞出试验航区,通过遥测系统向靶弹发出安全自毁控制命令,由靶弹飞行控制系统控制靶弹入水,完成自毁操作。这种安控策略的不足有:需在弹上加装遥测信号发射系统,地面配置遥测接收和控制装置,同时配备地面分析和决策系统,设备造价昂贵、硬件成本高;采用人工判断决策,对安控指挥人员的能力水平和实践经验要求较高;靶弹飞行控制系统的可靠性不能得到完全保证。美国等在组织靶弹供靶试验时,一般在弹上加装独立于靶弹飞行控制系统的靶弹自主安控设备,通过GPS系统实时定位靶弹的位置信息,靶弹自主安控设备根据GPS等数据实时分析判断靶弹状态,从而完成靶弹的规避和自毁控制操作,该法简单易行,可靠性高[4]。采用这种安控策略,面临的一个问题是GPS信息易受外部信号干扰。为提高靶弹供靶可靠性,确保试验安全,本文对一种基于GPS接收机、独立于靶弹飞行控制系统的靶弹安控器设计进行了研究。
1 安控器组成与功能模块设计
根据标准化、模块化、开放性原则,设计了基于PC104的靶弹安控器。其硬件平台主要包括主控计算机、多功能信号采集器、信号调理电路、电源模块、GPS接收机及天线、数传电台等部分。系统功能模块主要由程序装订、数据装订、与GPS接收机数据通信、安控地面仿真测试、与靶弹控制系统通信、弹上设备信息采集下传等组成。
1.1硬件组成
硬件系统的组成和信号传递如图1所示。
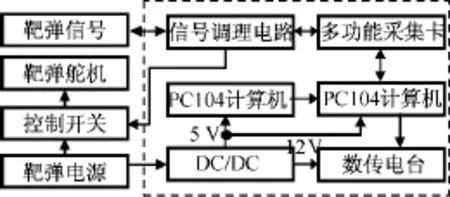
图1 靶弹安控器硬件组成Fig.1 Structure of the target missile safe controller
1.1.1 主控计算机
采用PC104,选用深圳盛博公司SCM-6241B,属于工业级宽温产品,CPU为80486,主频为100MHz,16M在板RAM,串口6个,并口1个,16M电子磁盘。主控计算机可根据靶弹工作时序实现系统硬件平台的配置管理和数据解算等功能。
1.1.2 多功能采集器
采用盛博公司的ADT652信号采集卡,有16单端/8差分输入,12位分辨率,A/D采样率最大为100kHz,24路I/O,82C54可编程定时器。采集板卡为全系列通用访问模式,极大提高了板卡应用灵活性和便利性,具较强的板卡扩展及软件支持功能。
1.1.3 信号调理电路
根据靶弹上的信号采集要求和工作时序自行设计,是硬件平台的关键模块,包括电压转换、光电隔离(开关量)和信号驱动三部分,以满足A/D转换和开关量的输入/输出要求;同时实现电路上的隔离,防止干扰进入。
1.1.4 电源模块
采用两级式变换器的参数设计,用电路解耦法改善直流变换器的电磁兼容性。电源分两组DC/DC变换,将从靶弹上输入的直流电分别变换为5,12V,供计算机、GPS接收机和数传电台使用。两组电源模块均为军品级,以保证质量。
1.1.5 GPS接收机
选用NOVATEL公司OEM-2接收机,+5V供电,通过串口与计算机通信,可设置工作模式、通信参数和导航电文格式等信息。
1.1.6 数传电台
选用MDS4710,由电源模块转换的12V电压为其供电。该电台采用DSP技术,抗干扰性能好,接收灵敏度高,传输速度快,在恶劣条件下能可靠通信。其专用工具软件方便安装调试和维护使用。
1.2 功能模块
1.2.1 程序装订
将主控计算机上的程序装订串行口与编译程序的设备相连,实现数据采集、解算、输出及安控指令输出、执行程序的装订与更新。
1.2.2 数据装订
将主控计算机上的数据装订串行口与地面测试设备连接,可接收地面测试软件中数据装订模块发送的安控区域经纬度数据,并按一定格式存储在系统的EEPROM中。
1.2.3 安控仿真测试
将主控计算机上的安控仿真串行口与地面测试设备相连,可对装订的安控区域进行仿真测试,也可实时监测GPS的输出信息和安控器的执行情况。
1.2.4 靶弹控制系统通信
连接靶弹控制系统与安控器通过串口,安控器可实时接收靶弹飞控系统输出的偏航等信息,作为安控备份数据。
1.2.5 GPS数据通信
主控计算机可实现GPS数据的接收、数据解算、数据输出及安控命令的输出与执行等功能。GPS OEM板可为安控器提供经度、纬度、高度、东/北/天向速度等数据信息。
1.2.6 弹上设备信息采集下传
通过多功能数据采集卡采集靶弹的模拟、开关信号,编码处理后可通过数传电台下传至地面接收设备。
2 安控执行策略与软件流程设计
2.1 安控执行策略
为保护参试舰艇等重要目标并防止靶弹飞出试验航区,根据任务区域、地理环境和航路要求,需预先设定靶弹安控警戒和规避爬高的区域,并按一定算法向安控器内注入安控警戒线、安控必炸线和规避爬高线的数据,如图2所示[5]。这些参数是执行安控策略的重要依据。
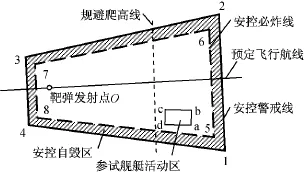
图2 安控概念Fig.2 Conceptions of flight safety controlling
2.1.1 安控警戒线
安控警戒线内部分是组织靶弹飞行试验的区域,即试验危险区,该区域为多边形,一般为四边形。靶弹飞行前需向弹上装订安控警戒线数据,包括四边形4个顶点的序号和经纬度坐标。设定顶点序号从1开始按逆时针方向排序。
2.1.2 安控必炸线(安控管道)
装订安控警戒线数据后,安控器自动沿警戒线内缩10km(该数值可调)生成一条封闭的安控必炸线,用于安控器发出安控自毁指令并可靠执行。生成的数据包括顶点的序号和经纬度坐标。顶点序号按逆时针方向排序。
2.1.3 规避爬高线
将参试舰艇活动的区域投影到靶弹预定飞行航线上,沿靶弹预定飞行航线距离该投影前端10km(该数值可调)处生成一条垂直线,沿此垂直线往靶弹飞行方向的区域为规避区。安控器在靶弹到达规避线时发出爬高指令,控制靶弹爬高以规避参试舰艇。
2.1.4 飞行航区
靶弹正常状态下的飞行区域,由安控必炸线围成,即安控管道内区域。
2.1.5 安控自毁区
靶弹执行安控自毁指令后,可能坠落地散布点形成的带状区域,由安控警戒线和安控必炸线围成(图中阴影区域)。
2.2 软件流程
主控计算机选用DOS操作系统为平台,用Turbo C++3.1设计控制应用软件。软件系统主要由初始化模块、采集模块、信息处理模块、信息编码发送模块、通信模块和中断模块等组成,加电后自动运行。软件主程序流程如图3所示。
靶弹通电后,安控器读取预先装订的安控参数,完成变量和硬件的初始化。靶弹发射后在空中飞行时,安控器实时采集弹上有关信号,并分析判断:先判断GPS接收机实时输出的位置信息是否有效、有无受到干扰[6]。若GPS信号正常,则优先采用GPS数据;若安控器判断GPS接收机实时输出的位置信息无效、受到强烈干扰,则采用弹上飞行控制系统解算出的偏航信息。安控器对GPS或飞控偏航数据进行解算、编码和处理,实时判定靶弹是否处于安控区或规避区。一旦判定靶弹飞行进入规避区或超出安控管道,则根据安控实施判别准则,完成靶弹对参试舰艇的规避或超安全区自毁,实现靶弹的安全可控飞行:当靶弹飞入规避区时,安控器发出规避指令,控制靶弹舵机动作使靶弹爬高,以规避参试舰艇;如靶弹飞出安控管道,安控器立即输出自毁指令,断开靶弹上的舵机供电线路,使靶弹迅速坠毁在安控自毁区域内[7]。在此过程中,靶弹安控器与地面系统间保持信息联络,能实时将靶弹上主要设备的状态信息和位置信息传送至地面设备,便于地面掌握靶弹工作状态。
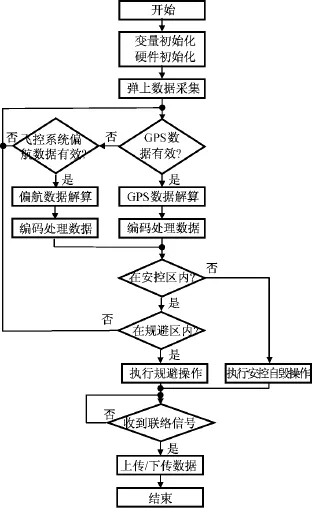
图3 软件主程序流程Fig.3 Flowchart of main software
3 关键技术
3.1 靶弹相关数据采集与处理
因弹上电磁干扰严重,安控器在采集弹上相关信号特别是模拟信号时,易受各类噪声干扰,采集的数据可能存在失真,造成信息误判[8]。为解决该问题,按以下规定采集处理数据。
a)程序设定每100ms采集1组数据,每次连续采集50组,去除最大、最小值,剩下的48组数据作算术平均,并将此平均值作为I/O部分信号的1次采集数值,由此保证采集数据的准确性。
b)对采集时间控制,使用计算机内部时钟计时。计算机内部时钟一般每55ms计时1次,为此修改了其定时间隔,将55ms改为50ms,保证采集时间间隔准确,不会出现时间误差累积[9]。
3.2 安控实施判别准则
靶弹在发射、飞行过程中,弹上电磁环境、力学环境非常复杂,GPS信号在传输中易受干扰出现误码,同时靶弹飞控系统输出的角度偏航信号也可能瞬时超过门限值[10]。因此,即使靶弹正常飞行,未飞出安控管道,安控器也可能会出现误判。对此,制定以下安控实施判别准则。
a)程序中设计了用于检查靶弹是否出现角度偏航或飞出安控管道的动态滑动窗口。为判断GPS数据是否进入规避区或超出安控管道,设计采用窗口宽度为5、门限为3的动态滑动窗口,即连续采集数据5次,若有3次以上数据出现超界,则判为区域超界;为判断角度偏航,采用窗口宽度为100、门限为80的动态滑动窗口,即连续采集数据100次,若有80次或大于80次偏航,则确认为靶弹偏航。
b)设定GPS信号正常时,以GPS数据为主,此时即使靶弹偏航,只要GPS数据未飞出安控管道,就不发自毁指令;GPS信号不正常时,以偏航数据为准,只要连续3次动态滑动窗口给出偏航信号,立即发出自毁指令。
4 可靠性仿真与分析
对安控器进行了多次地面仿真测试,以检验安控器的工作可靠性。仿真试验工作原理如图4所示。
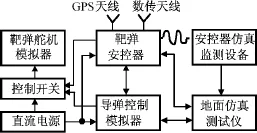
图4 安控仿真试验原理Fig.4 Principle of simulation test
试验前由地面仿真测试仪将安控参数,如安控警戒线多边形每个顶点的经纬度和顶点顺序号等,通过装订到靶弹安控器。模拟靶弹在空中飞行可能遇到的各种条件及其相应的工作状态,地面仿真测试仪实时将有关数据传输至安控器,检测安控器是否依据安控策略有效控制靶弹舵机模拟器动作,同时通过仿真监测设备实时监控安控器的工作状态及其与地面的传输数据是否正常。仿真结果表明:设计的安控器工作可靠,当靶弹处于安控管道(其中管道数据为虚拟数据,仅作参考)内时,不执行安控;若飞入规避区,则执行爬高指令(仿真结果如图5所示);若飞出安控必炸线,则执行安控自毁指令(仿真结果如图6所示)。

图5 仿真测试结果(进规避区)Fig.5 Result of simulation test 1
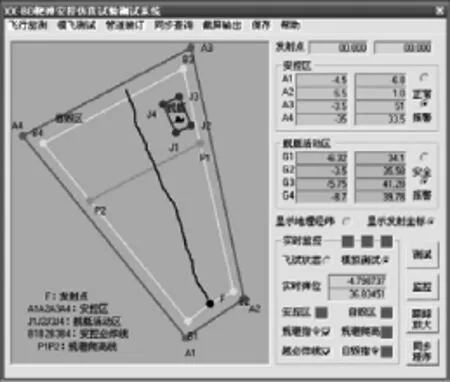
图6 仿真测试结果(出安控区)Fig.6 Result of the simulation test 2
5 结束语
本文通过在靶弹上加装高可靠性、基于GPS接收机、独立于靶弹飞行控制系统的弹载安控设备,实现了靶弹规避参试舰艇、在飞行控制故障或未被成功拦截的情况下坠毁到预定安全区域的目的,并利用靶弹控制系统的速度、偏航等信息作为备份,增加了安全余度,保证了靶弹在试验供靶过程中的安全可靠。靶弹安控器集信号采集、弹道测量、安全控制、信号传输功能于一体,不仅能执行靶弹安控策略而且可实时将靶弹上主要设备的状态信息和位置信息发送给地面设备,便于监测靶弹工作状态。该系统在靶场得到多次成功应用,圆满完成了多型试验的供靶保障任务,发挥了重要作用。
将靶弹飞行控制系统输出的偏航信息(当靶弹偏离正常射向时,超过预装订角度即判定为角度偏航)作为备份,增加了安全余度,避免了当GPS信号受到干扰时靶弹安控器误操控现象的发生。
[1] 文仲辉.战术导弹系统分析[M].北京:国防工业出版社,2000.
[2] 杨榜林.军事装备试验学[M].北京:国防工业出版社,2002.
[3] 曲宝忠,孙晓峰.海军战术导弹试验与鉴定[M].北京:国防工业出版社,2005.
[4] Jr EICHBLATT E J.Test and evaluation of the tactical missle[M].New York:Marcel Dekker Inc,1989.
[5] 薛艳峰,肖前贵,丛书全.无人机飞行安全控制与安控器设计[J].宇航计测技术,2012,32(6):30-34.
[6] 刘基余.GPS卫星导航与定位原理[M].北京:科学出版社,2008.
[7] 文传源.现代飞行控制[M].北京:北京航空航天大学出版社,2004.
[8] 凯瑟B E.航空和航天系统的电磁干扰控制[M].喻显荣,李玉兰(译).北京:宇航出版社,1989:22-23.
[9] 焦 鹏,游泽成,杨宇飞.计算机内部时钟稳定性实验及分析[J].测试技术学报,2011,20(1):22-25.
[10] 刘述民,张勇强,王全顺,等.飞行控制装备电磁干扰机理及防护研究[J].装备环境工程,2013(6):17-20.
猜你喜欢
考试与评价·高一版(2020年6期)2020-11-02
中国生殖健康(2019年3期)2019-02-01
电子制作(2018年11期)2018-08-04
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
中华手工(2017年2期)2017-06-06
汽车与安全(2016年5期)2016-12-01
太空探索(2016年12期)2016-07-18
中外会展(2014年4期)2014-11-27
环球时报(2010-02-11)2010-02-11