一种汽车转向灯双闪控制方法的研究
2016-01-08 00:47钱田义,郎朗
陕西理工大学学报(自然科学版) 2015年5期
一种汽车转向灯双闪控制方法的研究
钱田义,郎朗
(安徽工程大学 安徽省电气传动与控制重点实验室, 安徽 芜湖 241000)
[摘要]针对奇瑞汽车某项目在工程样件测试中发现的转向灯双闪异常,具体分析了传统转向灯控制系统中双闪控制的不足,根据车灯的安全标准及国家的相关要求,提出了一种K值校验和V/I曲线修正的控制方法。详细介绍了该控制方法的原理。实验结果表明,该控制方法可以很好的控制转向灯的双闪。
[关键词]汽车;安全行驶;转向灯;双闪控制
[文章编号]1673-2944(2015)05-0026-05
[中图分类号]U463.65+4
收稿日期:2015-01-12
作者简介:钱田义(1987—),男,安徽省芜湖市人,安徽工程大学硕士研究生,主要研究方向为运动控制系统分析与设计;[通信作者]郎朗(1956—),女,安徽省蚌埠市人,安徽工程大学正高级工程师,硕士生导师,主要研究方向为运动控制系统分析与设计。
汽车灯光是车辆的语言,对汽车的安全行驶有着重要的影响。汽车转向灯正常与否,对于行车的安全和交通秩序关系影响极大。随着行驶车速的不断提高和车流量的不断增加,交通事故的发生率也逐年上升,所以车辆在行驶过程中一定要保证汽车转向灯能够正常工作。汽车转向灯出现故障,便会出现转向灯双闪提示驾驶员。解决不正常的转向灯双闪是对汽车行驶安全的任务,也是汽车整体设计安全性能完善的要求。本文针对车身控制器在测试过程中发现的汽车转向灯双闪控制的缺陷,提出了一种K值校验和V/I曲线修正的控制方法,很好地解决了上述问题。
1转向灯双闪问题分析
奇瑞汽车某项目(本文代号表示为:B14-BH)在工程样件(Off Tooling Sample,OTS)测试中发现在9~16 V电压范围内随着整车电压的增大,转向灯出现倍频闪烁的情况,具体表现有两点。第一是车身控制器差异性,不同车身控制器接上相同的负载,在9~16 V电压范围内随着整车电压的增大,不同车灯控制器在不同电压值下出现倍频闪烁,有的车灯控制器在14 V时转向灯开始倍频闪烁,有的车灯控制器在15.7 V时转向灯开始倍频闪烁,有的车灯控制器转向灯闪烁频率则始终正常;第二是高边驱动(High Side Driver,HSD)左右通道差异性,将同一车灯控制器左右转向的输出接上相同的负载,在9~16 V电压范围内随着整车电压的增大,同一车灯控制器的左/右转向灯分别在不同电压值下出现倍频闪烁,有的左转向灯在14 V开始倍频闪烁,而右转向灯闪烁频率则始终正常。
1.1 车身控制器的差异分析
主机厂给出B14-BH的转向灯额定功率为:前转向灯21 W、侧转向灯5 W、后转向灯10 W,总功率为36 W。主机厂功能规范要求:前、后转向灯中任一损坏,转向灯执行倍频闪烁,而侧转向灯损坏不执行倍频闪烁。B14-BH项目软件判断转向灯倍频闪烁的条件为36-(10+5)/2=28.5 W,额定电压下低电流阈值为2.375 A。
不同电压U下转向灯低电流阈值公式为2.375×U/12。不同电压U下的阈值电流曲线如图1,3条曲线分别为阈值电流曲线、无灯泡损坏正常电流曲线、10 W灯泡损坏故障电流曲线。
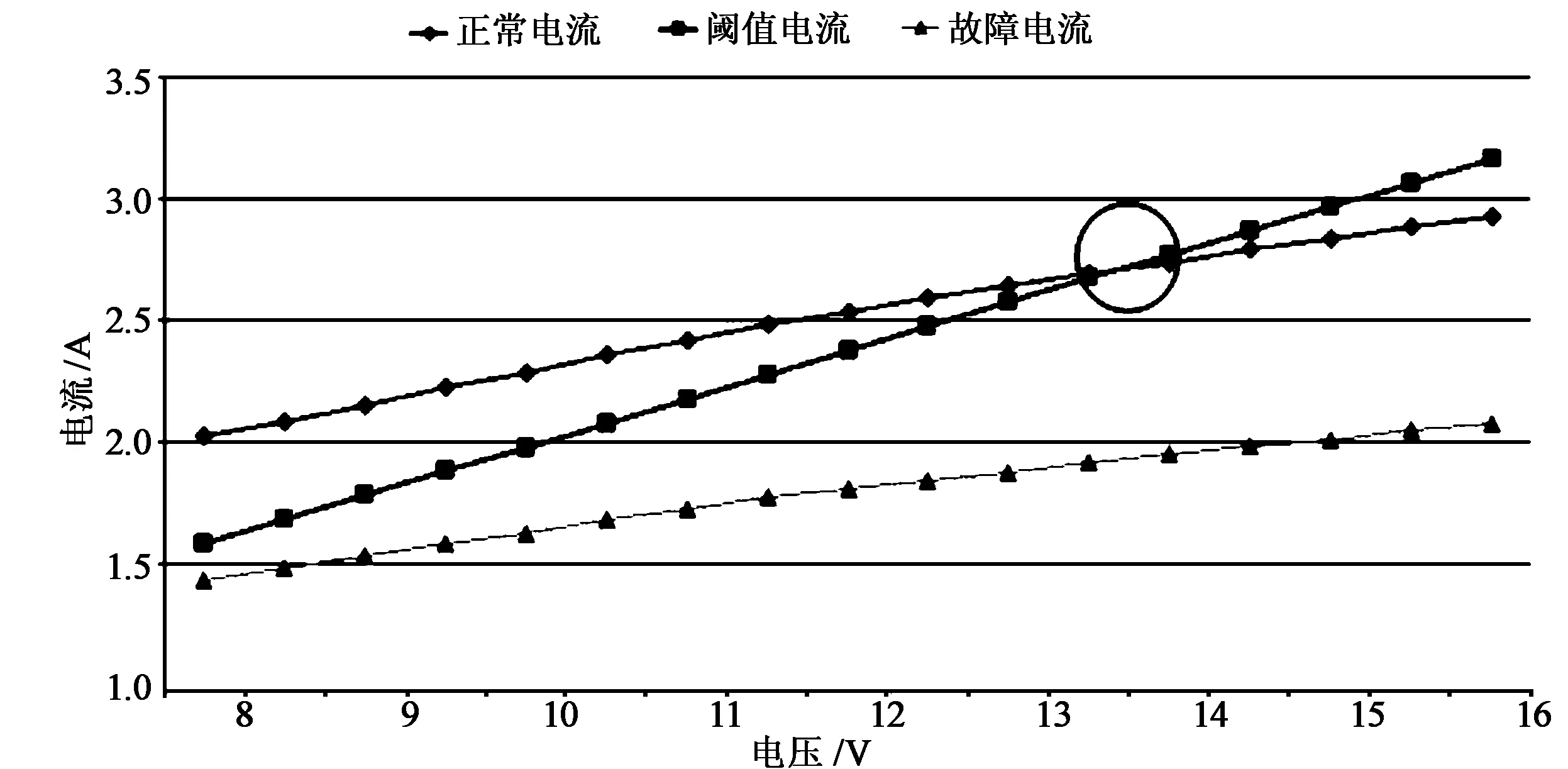
图1 28.5 W阈值电流-电压曲线图
从图1中可以看出,当电压上升至13.5 V左右时,阈值电流曲线与无灯泡损坏正常电流曲线出现交点,随着电压的继续增大,无灯泡损坏实际电流曲线在阈值曲线之下,软件判断为低电流,所以会执行转向灯倍频闪烁。
1.2 HSD左右通道差异性分析
车灯控制器转向灯驱动芯片选用VND5E025MKTR-E,电路图如图2所示。
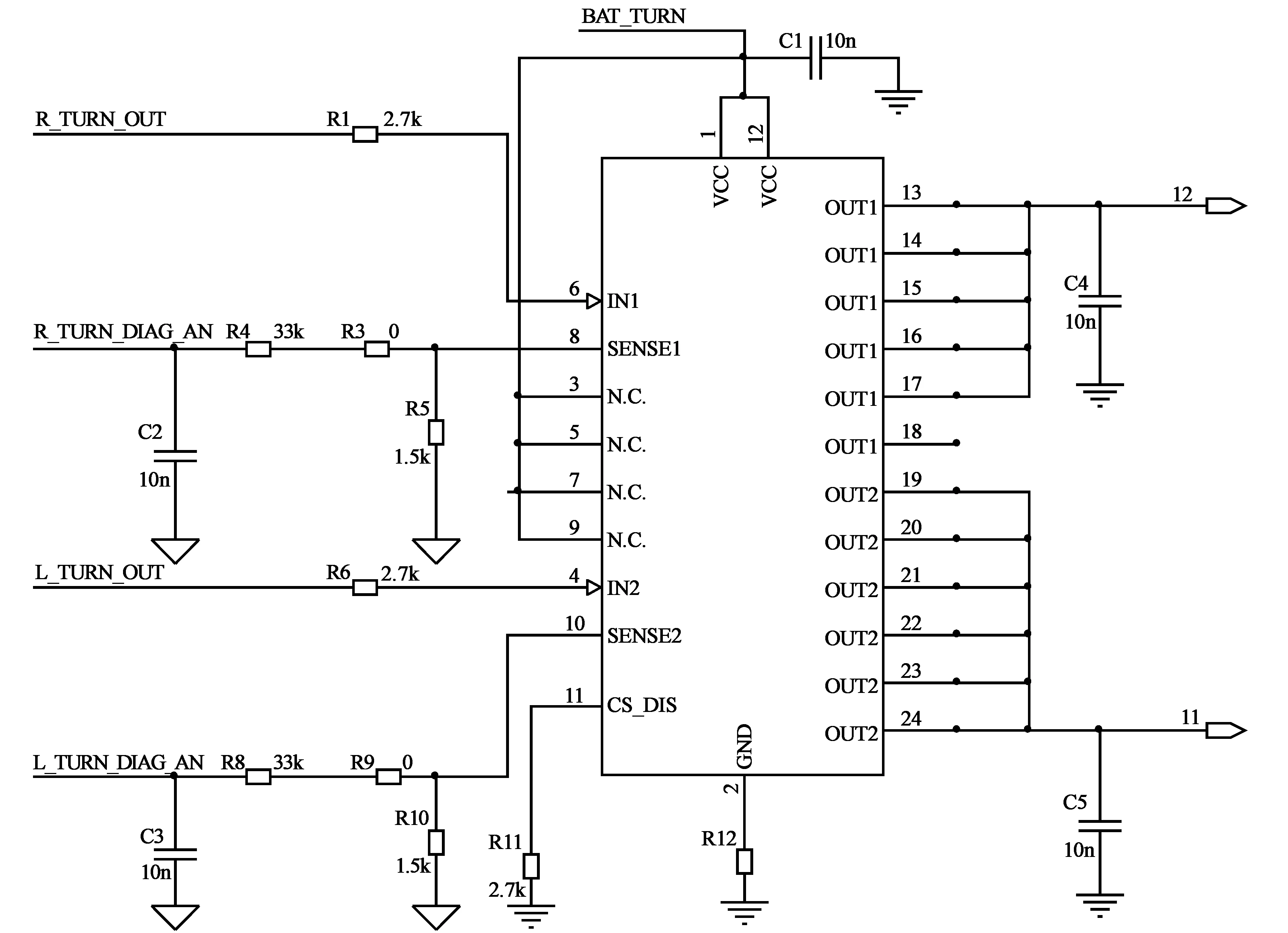
图2 B14-BH转向灯驱动电路图
如图2所示,转向灯芯片口SENSE1和SENSE2为诊断口,分别反馈左右转向灯输出电流Iout,诊断口的反馈电流IDiag与Iout存在一比例K=Iout/IDiag,诊断口再通过1.5 kΩ下拉电阻向单片机反馈诊断电压值UDiag=IDiag×1.5 kΩ。单片机根据UDiag的值判断车灯故障。每个车灯控制器的转向灯驱动芯片的K值以及同一芯片的左右通道的K值都会存在一定的偏差,那么反馈给诊断口的电压也是有差异的,所以会表现在不同车灯控制器转向灯在不同电压值下倍频闪烁和同一车灯控制器的左右通道转向灯在不同电压值下倍频闪烁。
2改进控制方法研究
2.1 侧转向灯实际功率
主机厂给出B14-BH的转向灯额定功率为:前转向灯21 W、侧转向灯5 W、后转向灯10 W,总功率为36 W。表1为各转向灯在不同电压下测试得到的电流数据。
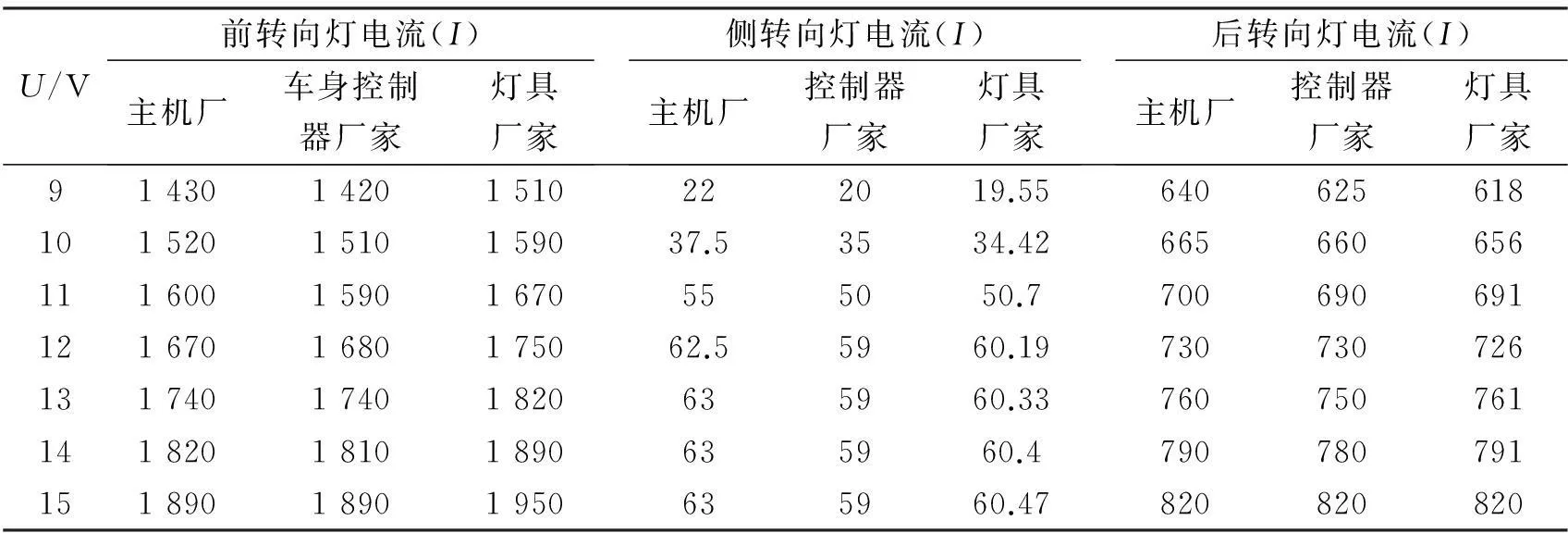
表1 各转向灯在不同电压下的电流数据 (电流单位:mA)
21 W前转向灯在12 V标准电压下额定电流应为1.75 A,10 W后转向灯额定电流应为0.83 A,5 W侧转向灯额定电流应为0.416 A。但是从表1的测试数据来看,侧转向灯(5 W)的数据偏差太大,在12 V标准电压下的实际电流仅60 mA,远远不能满足功率5 W的要求。根据侧转向灯的电流数据可以判断出侧转向灯是LED组合,并非灯泡负载,侧转向灯实际功率为0.8 W。
2.2 修正低电流阈值曲线
确定侧转向灯为LED组合,功率为0.8 W,转向灯实际总功率为21+10+0.8=31.8 W。软件设置转向灯低电流阈值需要保证阈值电流曲线在9~16 V电压内不会与正常电流曲线、故障电流曲线相交:
(1)如果阈值选择过大,比如选择28.5 W(如图1)会使阈值电流曲线与正常电流曲线相交,当电压高于13.5 V时,无灯泡损坏但转向灯出现倍频闪烁现象;
(2)如果阈值选择过小,比如选择23.4 W(如图3)会使阈值电流曲线与故障电流曲线相交,当电压低于10 V时,10 W灯泡损坏但转向灯却不再倍频闪。
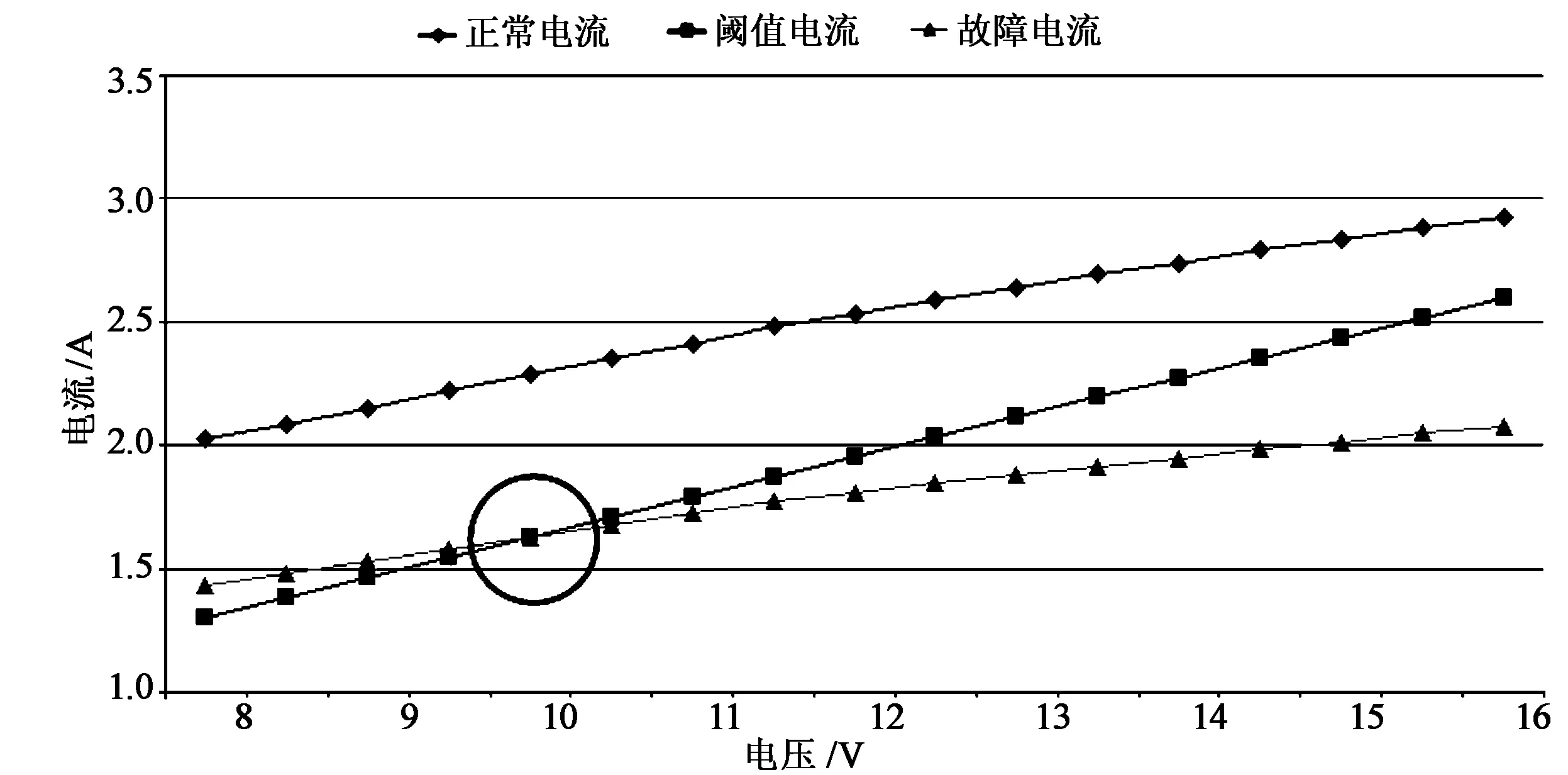
图3 23.4 W阈值电流-电压曲线图
软件针对31.8 W总功率重新判断转向灯倍频闪烁条件为31.8-(10+0.8)/2=26.4 W,额定电压下低电流阈值为2.2 A,不同电压U下阈值电流曲线见图4。3条曲线分别为阈值电流曲线、无灯泡损坏正常电流曲线、10 W灯泡损坏故障电流曲线。
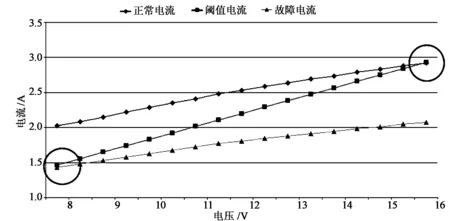
图4 26.4 W阈值电流-电压曲线图
从图4中可以看出,K值稍微有点偏差,就会造成阈值曲线在9~16 V电压范围内与正常电流曲线、故障电流曲线相交的风险。即使经过转向灯电流校验后的车灯控制器,其K值还是会由于芯片本身的原因存在偏差,所以有必要增加修正系数,对阈值曲线进行修正,使其平缓,保证在9~16 V电压范围内曲线两端不与上下线相交。
车灯控制器软件对阈值曲线进行了修正,增加了一个修正系数0.05,修正公式为:
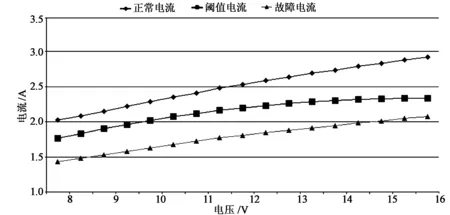
图5 修正后阈值电流-电压曲线图
其中I阈值为不同电压U下阈值电流,I阈值=2.2×U/12,不同电压下阈值电流曲线见图5。3条曲线分别为阈值电流曲线、无灯泡损坏正常电流曲线、10 W灯泡损坏故障电流曲线。
从图5中可以看出,在9~16 V电压范围内,阈值曲线几乎不存在与正常电流曲线、故障电流曲线相交的可能性,理论上保证了车灯控制器在工作电压范围内,软件能正确判断转向灯低电流。
2.3 转向灯电流校验
车灯控制器必须经过转向灯电流校验程序,校准其K值。高边驱动芯片的K值的偏差会使诊断口反馈的电流与负载输出的实际电流不成应有的比例关系,这样会造成诊断口实际反馈的电压值偏大或偏小,从而车灯控制器在正常工作电压范围内容易出现转向灯倍频闪烁的问题。
这里使用上位机发送校验命令,校准高边驱动芯片的K值。上位机发送的校验指令为82、48、F1、31、A0、8C。校验过程为:选用4.7 Ω的大功率电阻,诊断发送转向灯电流校验指令后,右转向灯开始闪烁,此时将该电阻接入BCM右转向输出电路中,接入电阻一段时间后右转向灯会自动停止闪烁,并转为左转向灯闪烁,再将该电阻接入BCM左转向输出电路中,待左转向灯停止闪烁后校验结束。校验结束后读取转向灯校验值,诊断发送读指令:82、48、F1、21、AA、86,读取校验值在合理的范围内,并将该值存储在寄存器内,即校验成功。
3实验结果分析
基于以上对B14-BH项目转向灯灯双闪问题的分析以及对改进的转向灯双闪控制策略的研究,在原有的硬件平台上进行了软件设计并在台架进行测试。搭建的测试台架包括转向灯灯泡、车身控制器、测试盒、开关电源和示波器。
对改进前车身控制器接上前转向灯和侧转向灯后测试,当电压调节到13.8 V时,转向灯输出时而倍频输出,时而正常输出。用示波器检测转向灯输出引脚,其波形如图6所示。
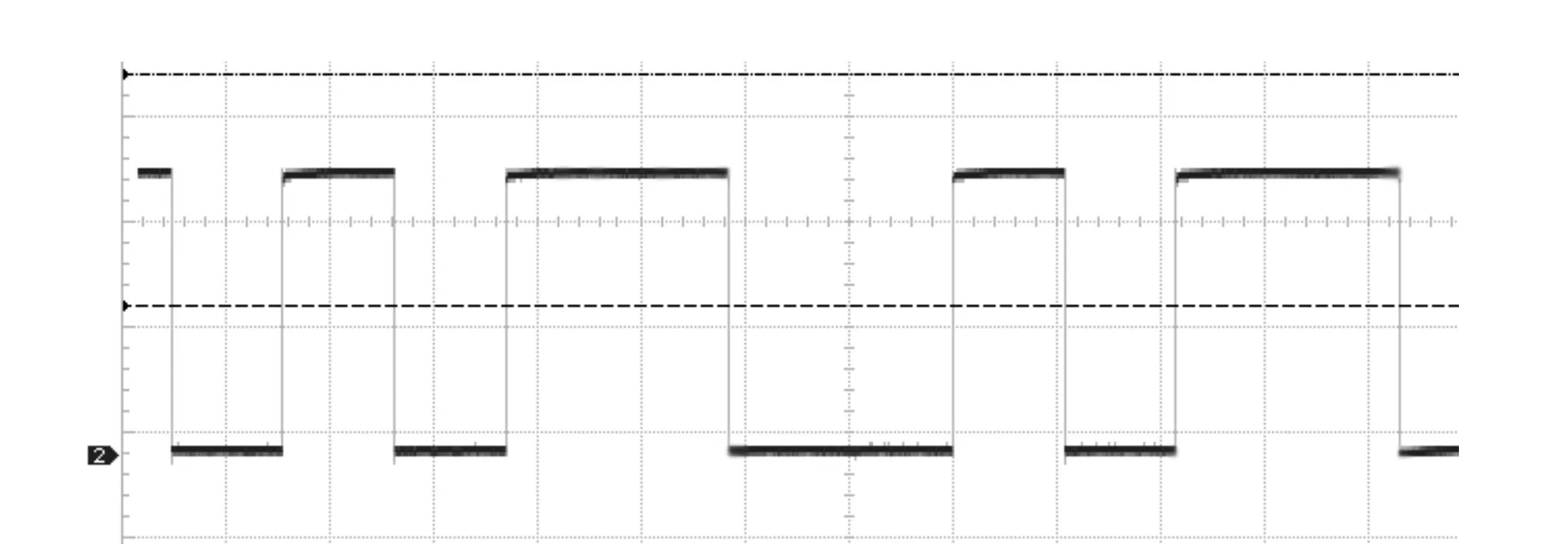
图6 转向灯输出引脚输出异常波形
对改进后的车身控制器接上前转向灯、侧转向灯和后转向灯测试,当电压调节到13.8 V时,转向灯输出正常频率。用示波器检测转向灯输出引脚,其波形如图7所示。
对改进后的车身控制器接上前转向灯、侧转向灯进行测试,当电压调节到13.8 V时,转向灯输出倍频。用示波器检测转向灯输出引脚,其波形如图8所示。
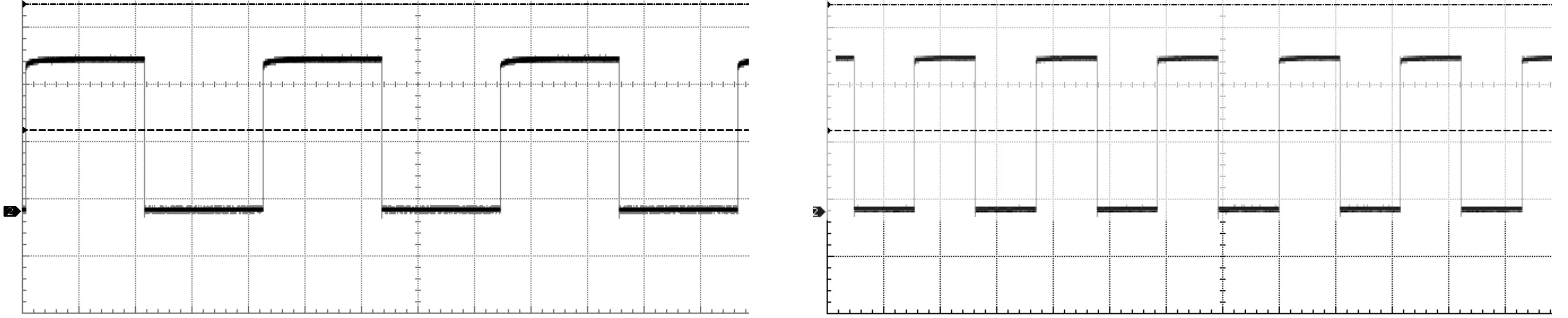
图7 转向灯输出引脚输出正常波形 图8 转向灯输出引脚输出倍频波形
通过以上对改进前和改进后的车身控制器转向灯输出引脚的波形测试,改进后的车身控制器转向灯输出实现了所要达到的要求。为了进一步验证改进后的车灯双闪控制是否满足要求,对100个样件进行了测试,并对改进前和改进后的数据进行了对比,实验数据如表2所示。

表2 100个的样件测试数据
通过以上实验数据的分析,改进的车身控制器的转向灯双闪控制功能稳定,完全满足车身控制的需求。
4结束语
本文分析了B14-BH项目转向灯双闪控制中存在的缺陷,针对这种缺陷设计了一种改进的双闪控制方法。通过实验仿真平台的测试达到了改善双闪控制的效果。改进了双闪控制的车灯控制器,使汽车转向灯工作稳定可靠。也为对车灯故障进行检测提供了依据。
[参考文献]
[1]马良友.汽车电器与电子控制系统[M].北京:机械工业出版社,2006.
[2]凌铭,张建文,黄中荣.汽车灯具的发展趋势[J].照明工程学报,2013,24(4):106-112.
[3]胡剑,李刚炎.客车照明与信号灯多路传输控制系统设计[J].微计算机信息,2006(4):124-126.
[4]许燕夫,包宋健.基于单片机的汽车车灯控制器的设计[J].数字技术与应用,2012(2):137-138.
[5]陈楚云.单片机控制汽车信号灯模拟系统的设计与实现[J].中国现代教育装备,2012(7):34-35.
[6]倪彰,范鑫,潘茂辉,等.基于CAN总线的电动汽车车灯控制系统设计[J].传感器与微系统,2011,30(12):82-84.
[7]娄云,袁霞.全电子汽车灯光检测器的研制[J].汽车技术,2007(6):20-21.
[8]魏志祥.基于CAN总线的嵌入式车灯监控系统设计[J].电子设计工程,2012,20(12):33-35.
[责任编辑:张存凤]
A vehicle steering lamp research of double flashing controlling strategy
QIAN Tian-yi,LANG Lang
(Anhui Provincial Key Laboratory of Electric and Control, Anhui Polytechnic University,Wuhu 241000, China)
Abstract:The double flash anomaly of the steering lamp was found in the OTS test for the B14-BH project. The deficiencies of the light control system with double flash controlling were analyzed concretely. According to the relevant requirements and national lamp safety standard, a control method of K Calibration and V/I curve correction was proposed. The principle of the control strategy was introduced in detail. The experimental results show that this controlling method can perfectly control the steering lamp with double flash controlling.
Key words:automotive;safe driving;the steering lamp;double flash controlling
猜你喜欢
汽车维护与修理(2019年13期)2020-01-01
汽车与安全(2019年9期)2019-11-22
模具制造(2019年3期)2019-06-06
儿童时代·快乐苗苗(2017年7期)2018-01-24
作文大王·低年级(2016年4期)2016-04-18
信息记录材料(2016年4期)2016-03-11
北京汽车(2015年5期)2015-12-04
汽车电器(2015年3期)2015-12-02
决策探索(2014年21期)2014-11-25
汽车电器(2011年12期)2011-12-18