露天矿卡车雷达防追尾自动刹车系统的研究与应用
2016-02-16 02:35王有仓
工程建设与设计 2016年8期
王有仓
(中国神华准能集团,内蒙古 薛家湾 010300)
露天矿卡车雷达防追尾自动刹车系统的研究与应用
王有仓
(中国神华准能集团,内蒙古 薛家湾 010300)
论文阐述了毫米波雷达技术的信号收发原理,介绍了最新研制的露天矿卡车雷达防追尾系统的组成与自动刹车功能。通过矿山现场的工业实验和分析,为卡车提供了在不同道路条件下的安全距离确定准则,其中包括卡车与障碍物、卡车与卡车之间的安全距离准则。在国内露天矿首次成功地将毫米波雷达技术应用到矿山生产实践,为安全生产提供了先进的技术手段和方法。
雷达传感器;安全距离;自动刹车;防追尾
【DOI】10.13616/j.cnki.gcjsysj.2016.07.089
1 问题的提出
大吨位重型卡车运输矿岩,是大型露天矿山运输的主要形式之一。运输的主体设备为重型卡车,由于其车体庞大,如图1所示,司机视线存在盲区。在盲区范围内司机看不到卡车周围的人或物体。而运输的道路分布复杂,弯道和斜坡道起伏多样。采场内移动的辅助设备种类繁多,如指挥车、火药车、推土机、修路机、洒水车等。同时,驾驶员工作强度大,连续开车几小时,特别是夜间行车,有时存在疲劳驾驶等问题。以上这些种种,给运输作业的安全生产带来了巨大的隐患。

图1 重型卡车与小车的比较
2 雷达防追尾系统的研制
2.1 雷达传感器

表1 各种技术的对比优劣表
以24G多普勒效应为技术的雷达传感器,工作时发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息,这样即可测量前方障碍物距离和速度。
2.2 系统组成及原理
雷达系统的组成如图3所示。
雷达传感器:安装在卡车前端的雷达传感器,发射和接收电磁波信号,通过信号解析算法,探测本车与前方车辆或设备之间的距离与速度。
雷达控制器:雷达控制器用来接收来自雷达传感器的数据,根据解算的距离和速度,按着雷达防追尾刹车准则,给出是否刹车的命令;并通过刹车制动检测装置,得知刹车踏板的刹车进程;利用系统状态显示器,可以实时得知雷达系统的工作状态;必要时通过刹车制动解除按键,使刹车踏板恢复到刹车前的位置。
刹车机械装置:由其内部的步进电机驱动执行机构转动以便产生制动,可实现卡车的电制动(减速)或工作制动(刹车);刹车后只能由卡车司机按动刹车制动解除按键,才能使刹车踏板恢复到原来位置;在特殊情况下(大雨、泥泞、路滑、雷达设备故障等),要取消雷达系统功能,要按下应急解除开关,使刹车机械装置中的电动离合器断开,雷达刹车系统失效,不再参与刹车控制。
系统状态显示器:显示雷达系统的工作状态,交接班时,通过系统状态显示器可以查看设备的完好状况;平时出现故障时,显示器给出具体故障内容,便于系统检查和维护。
应急解除开关:在特殊情况下,为解除雷达刹车系统使其不再参与刹车控制,按下应急解除开关,使刹车机械装置中的电动离合器断开,雷达刹车系统失效。
刹车制动解除按键:当刹车机械装置中的步进电机旋转刹车执行机构,使刹车踏板动作,达到电制动(减速)或机械制动(刹车)时,为解除刹车状态,必需由司机手动按下刹车制动解除按键,使刹车踏板恢复到刹车前的位置,刹车状态解除,雷达刹车系统回到初始状态。
刹车制动检测装置:采用红外测距技术,检测刹车踏板的移动距离,从而确定刹车机械装置中的步进电机驱动是否到位,刹车位移进展程度;也用来检测司机是否踩下刹车踏板,为雷达系统提供刹车踏板实时状态信息。
刹车执行机构:连接刹车机械装置中步进电机转盘与刹车踏板之间的联动机构。动作时起到移动刹车踏板,模拟司机刹车的踩踏动作,实现刹车踏板位移,达到刹车或减速的目的。
刹车踏板:卡车司机室内自有的刹车踏板,也是雷达系统连接的终端部件。

图3 矿用卡车雷达防追尾系统组成
3 雷达发射接收原理
3.1 设置调制信号
探测静止物体的距离,即静态物体到传感器之间的距离,调制信号采用锯齿波即可。这是因为,此时的干扰大多为多普勒信号,而在抗干扰性能方面,锯齿波调制要优于三角波调制。选用线性升坡曲线或者降坡曲线作为发射频率的时间相关函数,并定期重复这些波,以期得到可能的平均值。
3.2 雷达算法分析
差频信号中的距离信息,是通过由时间延迟引起的差频信号来反映的。图4是带有锯齿形调制方案的FMCW雷达发射和接收信号的时间相关曲线。发射频率曲线(实线)与接收频率曲线(虚线)的唯一区别是时间延迟。

图4 雷达发射和接收信号的时间相关曲线
如图4所示,在某一时刻t0时的瞬时接收信号,其频率低于瞬时发射频率(对于升坡曲线而言),原因是传感器在同一时刻发射频率已经升高。如果在混频器中混合发射信号和接收信号,就会生成一个恒定的差频信号,其中包含所需的距离信息。而且,此频率越高,目标的距离越远。公式(1)说明了静止目标距离R与差频fD的关系:

式中,co为光速;R为目标的距离;T为锯齿波重复周期;fD为差频;Δf为振荡器发射频率的变化范围,即调频宽度。
由公式(1)可以看出,固定其余参数时,调频宽度Δf越大,探测距离可能越小。要使得差频处理有意义,就要使调频速度f等于差频fD,也就是说,扫描要生成一整个差频周期,此时可定义最小可测距离Rmin。公式如下:

4 现场安全距离实验
4.1 障碍物安全距离确定
安全距离是指车辆在不同的速度下行驶,启动刹车后车辆从该速度降到停车所行驶的距离。安全距离是自动刹车的重要指标,根据露天矿的实际测定,它是由不同速度条件下获得的数据,经过分析和整理,建立了如图5所示的M2障碍物刹车距离曲线,为自动刹车提供了安全距离判断准则。
障碍物安全距离公式:

式中,K为安全距离,m;M0为预留距离,刹车后车辆停下后与障碍物的距离,取5m;M2为刹车距离,雷达防撞系统刹车开始到停止所走过的距离。
由于采用了动态倾角传感器,对行车过程中的上坡、下坡和平路的状况进行实时测定,从而可以确定卡车运行在何种路况下,便于前方障碍物的安全距离:
障碍物平路安全距离Kzp的表达式为:

障碍物下坡安全距离Kzx的表达式为:

障碍物上坡安全距离Kzs的表达式为:

式中,V代表卡车启动刹车时的速度,km/h。
4.2 同向行驶安全距离确定
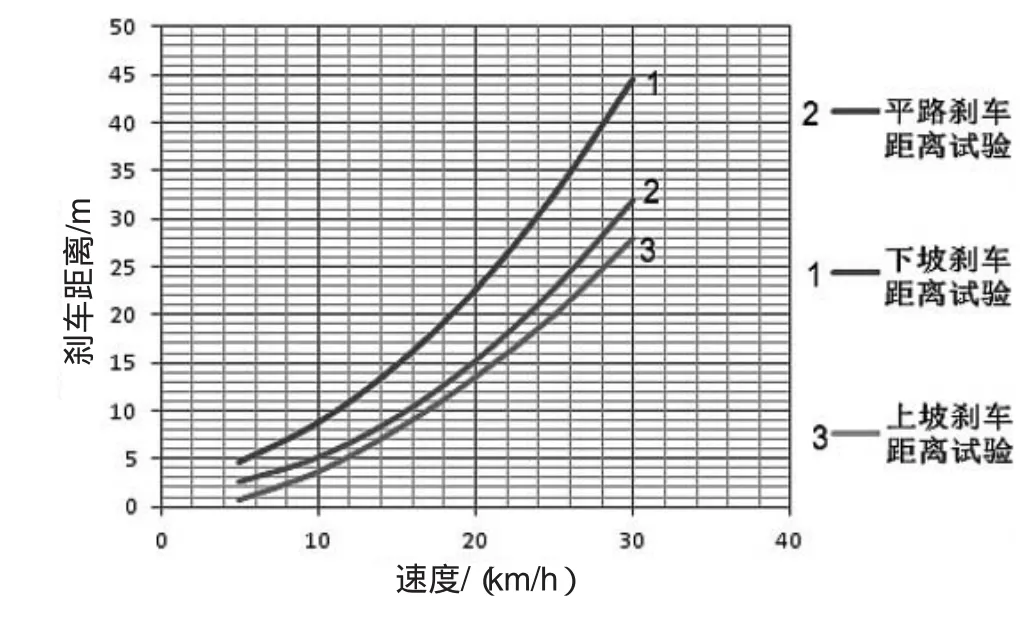
图5 雷达刹车距离M2与车速V在不同坡度条件下的曲线图
如果卡车前面有车,同向行驶,考虑到不同于障碍物,确定安全距离就要考虑前车的刹车距离。因为如果前面车辆启动刹车,刹车后车辆从最初速度降到速度为零也需要行驶一段距离。与障碍物比较而言,障碍物不能动,而前车是运动的。即使同时刹车,也都有向前行驶一段距离的情况。为了减少不必要的预留距离,只要保证前后两车刹车后能够达到设定的间隙即可,也就是与式(4)中的M0值即可。由此得出下面同向行驶车辆的安全距离计算公式:

其中,M1为前车人为刹车距离,开始刹车到停止刹车所走过的距离,m;其他符号意义同前。
前车的刹车距离为何以人为刹车产生的距离来计算,那是因为人为刹车所产生的距离与雷达自动刹车系统产生的刹车距离是不同的,考虑到这种实际情况,只能按照各自的刹车距离来计算。同样,也要采用动态倾角传感器,对行车过程中的上坡、下坡和平路的情况进行实时测定,从而得出同向行驶在不同路况条件下的人为刹车距离公式:
同向平路人为刹车距离M1tp的表达式为:

同向下坡人为刹车距离M1tx的表达式为:

同向上坡人为刹车距离M1ts的表达式为:

式中,V为卡车启动刹车时的速度,km/h。
卡车雷达自动刹车系统最大的刹车距离是在下坡时产生的,而人为刹车距离最小在上坡时产生的(如图6所示),为得到最大的安全距离,将雷达最大刹车距离和卡车人为最小刹车距离带入式(8)得到同向行驶时最大安全距离公式(取M0=5m):
Kt=6.688+V2(0.227+0.039V2)-V1(0.0352+0.0266V1).12)式中,Kt为卡车同向行驶时最大安全距离的表达式,m; V2为采用雷达防撞刹车系统的卡车车速,km/h;V1为采用人为刹车的卡车车速,km/h。
当然最大的安全距离可作为检验同向行驶车辆之间的最安全指标,在实际安全距离的确定上,采用的是不同坡度下的具体公式,由道路条件来进一步确定。
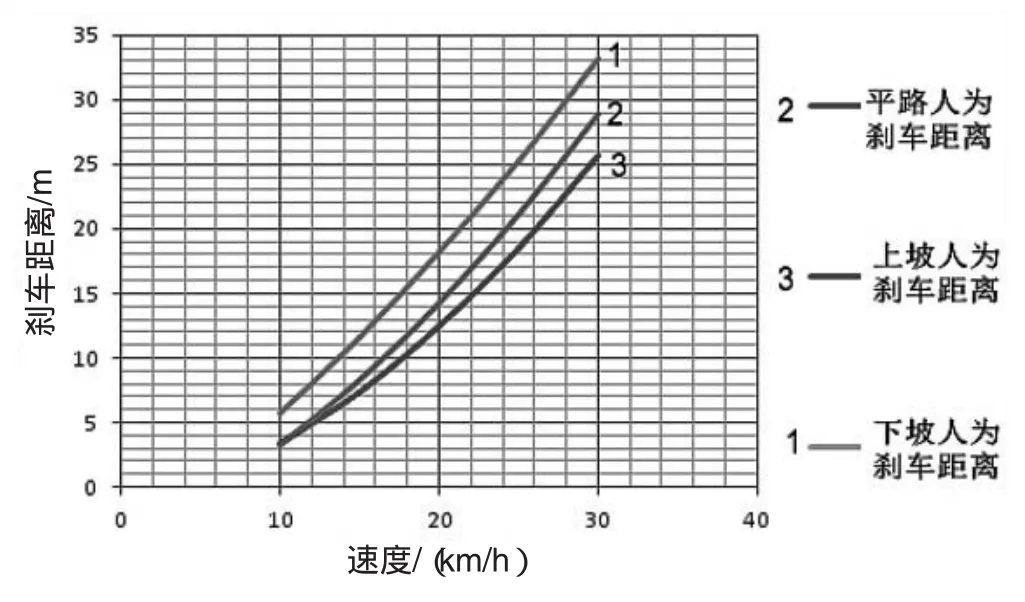
图6 人为刹车距离M1与车速V在不同坡度条件下的曲线图
5 结论
经过两年的试验,证明大功率超声波、红外线、机器视觉、激光雷达在露天矿重型卡车防追尾应用中,均因各传感器的特性不适应露天矿复杂的作业条件而没有成功。
采用毫米波雷达技术开发的露天矿车雷达防追尾系统,经过多次的不断改进、完善、优化和试验,证明在露天矿重型卡车防追尾应用中,能够满足矿山生产的复杂作业环境,并得出以下结论:
1)毫米波雷达防追尾自动刹车系统经过一年的生产试验和运行,证明系统设计技术先进,结构合理,能够满足矿山生产现场的卡车防追尾需求;
2)通过试验建立的不同条件下安全距离计算准则,能够指导相应车辆在采场运行过程中的防追尾自动刹车的实现,为运输作业的安全生产提供了技术保障;
3)通过在不同的运输作业环节(铲位、装卸、同向行驶、相向行驶、弯道会车等)、不同道路条件(上坡、下坡、端帮等)、不同天气(粉尘、大雾、夜晚、雨天)的大量试验,本系统都能正常运行,满足了生产的需求。
综上所述,我们研发的露天矿车辆雷达防追尾自动刹车系统,经过了多次的不断改进、完善、优化和试验,证明在露天矿重型卡车防追尾应用中,能够满足矿山生产的复杂环境,达到了预期效果,完全可以在露天矿生产中推广应用。
【1】王治国,李熹,郭德淳,费元春.超宽带汽车防撞雷达的设计[J].现代雷达,2007(4):29.
【2】ZhengXinglin,LiuYang,ZengYingsheng.SignalProceedingofAutomobile MillimeterWaveRadarBaseonBPNeuralNetwork,InProceedingofICGST InternationalConferenceandMachineLearning(AIML06),June2006.
【3】梁品,陈照章,于敬泉.基于DSP的汽车防撞雷达及其信号处理[J].微电子学,2007(5):37.
Research and Application of Anti-Collision and Auto-braking System Based on Radar for Trucks with Open-pit Coal Mine
WANGYou-cang
(ShenhuaZhungeerGroupCo.Ltd.,Xuejiawan010300,China)
This paper expounds the principle of signal receiving and transmitting based on tech1nology of millimeter wave radar, and introduces the constitution of anti-collision system and automatic braking function of latest developmental open-pit-coal mine truck based on rodar. Through the industrial experiment and analysis in themine site, the safety distance determination criterions for trucks in different road conditions are provided,which includes the safe distance criterion between trucks and obstacles, trucks and trucks. For the first time in China, the application of millimeter wave radar technology has been successfullyappliedinthemineproductionpractice,whichprovidesadvancedtechnologyandmethodforthesafeproduction.
radarsensor;safetydistance;automaticbrake;anti-collision
TD65
A
1007-9467(2016)07-0139-03
2016-5-10
王有仓(1963~)男,内蒙古鄂尔多斯人,教授级高级工程师,从事安全监督系统研究,(电子信箱)238741003@qq.com。
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
电子乐园·上旬刊(2021年8期)2021-05-16
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国煤炭(2016年9期)2016-06-15
河北地质(2016年1期)2016-03-20
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10