中风康复训练装置的设计
2016-03-10 00:16海南医学院信息技术部
电子世界 2016年24期
海南医学院信息技术部 杨 芳
中风康复训练装置的设计
海南医学院信息技术部 杨 芳
本训练装置实现用机械臂带动患肢运动,帮助病人神经康复。机械臂采用气动人工肌肉作为驱动器,给出了训练装置的运动轨迹规划,并采用ARM处理器实现训练装置的运算量大和实时性要求。本训练装置具有便携性可以满足家庭训练。
训练装置;气动人工肌肉;关节模型;ARM
0 引言
随着老龄人口的增加,年龄增长引起的疾病也逐渐增加,其中最常见、危害最大的就是中风。随着医疗水平的提高,其死亡率已有所下降,但致残率居高不下。大约1/3的脑卒中存活者会遗留严重的残疾,最常见的结果是上肢运动与协调的功能障碍,大约85%的脑卒中患者一开始显示出上肢功能障碍而只有50%的患者能够恢复患侧的上肢功能[1][2]。对其偏瘫部位进行康复训练是十分重要和关键的医疗手段,及早进行康复训练可以大大减少残疾的可能性。
1 训练装置
本训练装置是用机械臂带动患肢按预先设定的轨迹做被动和主动运动。本训练装置由控制器、压力比例阀、气动人工肌肉、角度传感器、压力传感器组成。气动人工肌肉工作所需要气压由外部气源提供,当气体从外部气源向气动人工肌肉流动时经过压力比例阀,压力比例阀的作用是控制流入气动人工肌肉的气体压强。随后气流进入气动人工肌肉,使得气动人工肌肉收缩或伸张,两个气动人工肌肉通过链轮连接,不同的气压使得其对外有力的输出从而使得关节转动[3][4]。将测得角度传感器和压力传感器的数据反馈到ARM控制系统,由控制系统将测得值与设定值相比较,并控制压力比例阀流入气动人工肌肉的气压来消除两者之间的误差,从而保证设定值与实际值一致。
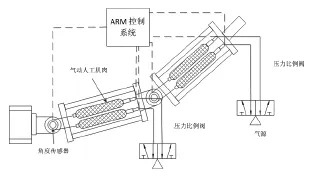
图1 系统框图
2 气动人工肌肉
气动人工肌肉是患肢运动的驱动器。气动人工肌肉是由一段外部包裹的纤维网的橡胶筒和两端的接头连接组成,如同生物肌肉那样能产生很强的收缩力[5][6][7]。当气动人工肌肉充气后,橡胶筒开始变形膨胀。由于纤维编织网的刚度很大,其对橡胶筒的约束使得气动人工肌肉径向膨胀和轴向收缩。

上式为气动人工肌肉的输出力F与压强P之间的关系式,从式中可以看出气动人工肌肉的输出力与压强成正比。式中α0为编织角,r为半径,k为校正值,L0为初始长度。
3 运动轨迹规划
训练装置对于运动路径有严格要求,必须在直角坐标空间中进行规划,然后将规划得到的直角坐标空间中的轨迹序列运用训练装备运动学反解算法变换到关节坐标空间中,再进行关节运动轴的控制。图2所示就是训练装置在直角坐标空间中进行路径规划控制的框图。

图2 路径规划控制的框图
如图3所示,由余弦定理有:
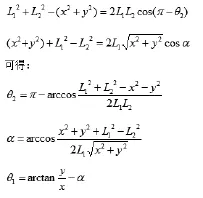
从图3可以看出,实际运行中,要到达同一个位置可能有两种路径,如何从运动学的多组反解中选择一组合适的解是一个值得研究的问题。一般地,具有多组反解的运动学问题可以采用优化算法来解决,定义一个优化准则,选择满足优化准则的最优解作为运动学的确定反解。当不存在障碍物时,可以使用“最短行程”准则,因为训练装置的运动是连续的,结合前一次训练装置运动学反解得到的关节坐标位置,选取使训练装置关节运动量最小的一组解作为反解,这种选取方法可以使得训练装置的运动保持连续。
4 控制系统
为满足控制系统的运算量大、实时性要求,本设计的控制系统采用 PHLIPS的LPC2210作为处理器,该处理器是基于一个支持实时仿真和跟踪的16/32位144脚ARM7TDMI-S CPU 的微控制器[8]。一个嵌入式处理器自己是不能独立工作的,因此一个ARM嵌入式最小系统包括:电源电路、系统时钟电路、复位电路、系统存储器电路和调试接口,如图4所示。
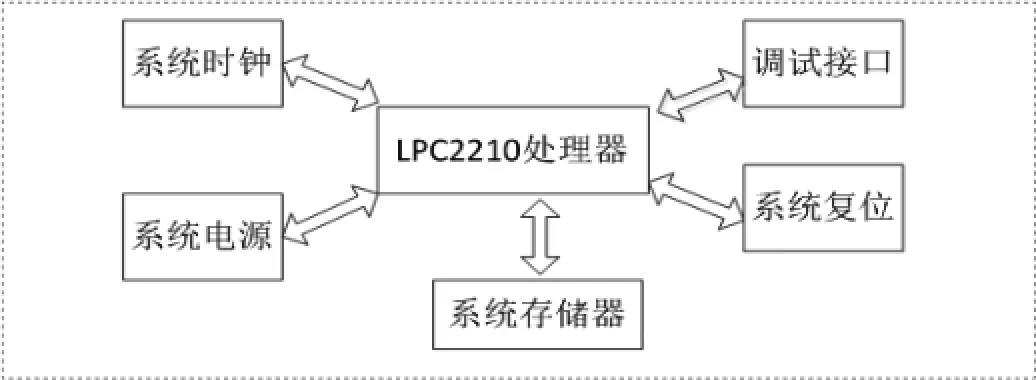
图4 ARM控制系统框图
控制系统的作用是:①根据预定位置(x,y)计算出角度的大小θ1、θ2;②通过θ1、θ2的大小计算气动人工肌肉1、2、3、4应该的伸缩量ε;③根据伸缩量ε计算流入气动人工肌肉的气压并控制压力比例阀流入气动人工肌肉的气压;④比较各压力传感器的实际测量值与计算值是否一致,若不一致控制改变压力比例阀流入气动人工肌肉的气压;⑤角度传感器的反馈数据进入控制系统,由控制系统比较实际值和测量值,若不一致控制并调整数值。
5 结语
本训练装置采用的气动人工肌肉作为驱动器,气动人工肌肉组成的关节模型具有自缓冲、自稳定的特点,从而使得训练装置更加安全。控制系统采用ARM处理器,能够满足本训练装置运算量大、实时性的要求,设计的训练装置是以任务为导向的运动训练从而使患肢达到神经康复的目的。
[1]Parker,VM,Wade DT,Langton-Hewer R,et al.Loss of Arm Function after Stroke:Measurement,Frequency,and Recovery.Int Rehabil Med,1986,8:69-73.
[2]Broeks JG,Lankhorst GJ, et al.The Long-term Outcome of Arm Function after Stroke:Results of a Follow up Study.Disabil&Rehab il,1999,21(8):357-364.
[3]TU Diep Cong Thanh, Kyoung Kwan Ahn.Nonlinear PID control to improve the control performance of2 axes pneumatic artificial muscle manipulator using neural network. Mechatronics16,2006,:577–587.
[4]Kyoung Kwan Ahn *, Huynh Thai Chau Nguyen.Intelligent switching control of a pneumatic muscle robot arm using learning vector quantization neural network. Mechatronics 17,2007:255–262.
[5]Chou, C.-P., and B. Hannaford. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Transactions on Robotics and Automation 12,1996:90–102.
[6]Chou C P,Hannaford B.Measurement and modeling of mckibben pneumatic artificial muscles.IEEE Trans Rob Autom,1996,12(1):90-102.
[7]Wang,SF,Sato,K.High-precision motion control of a stage with pneumatic artificial muscle.PRECISION ENGINEERING-JOURNAL OF THE INTERNATIONAL SOCIETIES FOR PRECISION ENGINEERING AND NANOTECHNOLOGY,2016,1(43):448-461.
[8]http://www.alldatasheet.com.

短路电流周期分量起始有效值:
本设计是基于单一景点深度开发的专门性的游客服务的手机APP。本设计专注于单一景点开发,因此景点的信息覆盖全面,没有冗杂信息干扰,目的性明确,垂直服务于景点旅游的游客。本设计的意义在于旅游景区为游客提供更好的服务,为用户提供更好的指引。同时游客能够通过APP随时随地了解某一景区的最新动态,有利于自己选择合适的时间出游,并且能够快速地满足酒店、旅游社以及旅客三方面的需求[3]。

当10kV母线并列运行时,10kV侧短路:

短路电流周期分量起始有效值:
计算结果显示,当10kV母线并列运行时,10kV侧发生短路,短路全电流最大有效值达36.35kA,考虑10kV设备开断电流不宜选择过大,故主变压器低压侧10kV母线不考虑并列运行方式。
通过上述的短路电流计算可进行短路的动稳定校验,动稳定条件为:
式中:ich—短路电流冲击值(kA);Ich—短路全电流最大有效值(kA);idf—电器允许的极限通过电流峰值(kA);Idf—电器允许的额定短路开断电流(kA);
短路电流计算结果和设备技术数据的比较详见下表:
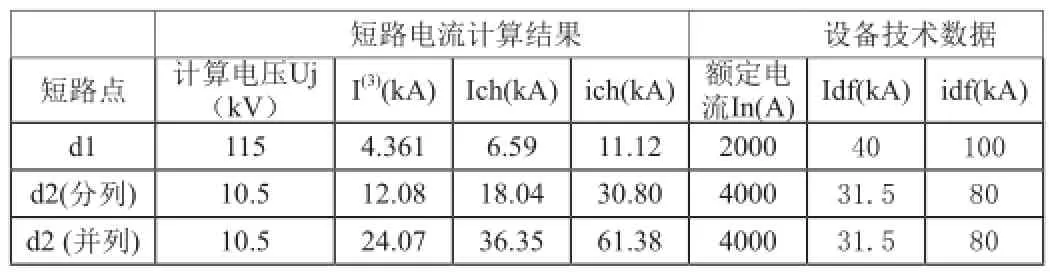
由上表可见,各电压等级的最大短路电流均在所选断路器的开断能力之内,所选择的110kV SF6断路器、10kV真空断路器完全满足动稳定的要求。
4 结论
本文通过110kV谷阳变电站的设计实例对短路电流计算作了重要阐述,为该变电站的进一步设计打下了良好的基础。
参考文献
[1]焦留成.供配电设计手册[M].中国计划出版社,1999.
[2]王锡凡.电力工程基础[M].西安交通大学出版社,1998.
[3]张炜.电力系统分析[M].中国水利水电出版社,1999.
[4] 水利电力部西北电力设计院.电力工程电气设计手册(电气一次部分)[M].中国电力出版社,1996.
作者简介:
杨晓艳,女,安徽蚌埠人,工程师,现供职于国网安徽省电力公司蚌埠供电公司经研所。
杨芳(1983- ),女,讲师,主要从事医学物理教学,研究方向为医疗仪器。
海南医学院教育科研课题《医学信息管理专业模拟电路与数字电路课程改革与实践》(编号:HYP201514)。
猜你喜欢
军事文摘(2022年8期)2022-11-03
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
液压与气动(2020年2期)2020-02-18
中华老年口腔医学杂志(2016年1期)2017-01-15
作文大王·笑话大王(2016年6期)2016-06-22
作文大王·笑话大王(2016年4期)2016-04-27
作文大王·笑话大王(2016年3期)2016-03-11