双轴旋转调制光纤惯导系统运动隔离控制实现
2016-03-16 06:36吴国强谭秋玥
导航定位与授时 2016年4期
于 浩,吴国强,高 峰,谭秋玥
(1.天津航海仪器研究所,天津 300131;2.河北工业大学,天津 300401)
双轴旋转调制光纤惯导系统运动隔离控制实现
于 浩1,吴国强1,高 峰1,谭秋玥2
(1.天津航海仪器研究所,天津 300131;2.河北工业大学,天津 300401)
框架旋转控制的稳定性、快速性、准确性是捷联式双轴旋转调制惯导系统发挥精度潜力的重要保障条件。针对这一需求,搭建了双轴旋转控制系统,选用了直流力矩电机结合旋转变压器的硬件结构,设计了基于DSP的高速控制线路板作为控制器,完成了信号流程的构建,并设计相应PI控制算法,实现了光纤陀螺惯导系统隔离载体运动的旋转控制功能。实验结果表明,IMU姿态隔离效率达99%以上,框架旋转控制性能良好,能够满足系统隔离载体运动的需求。
双轴旋转;DSP;PI控制;隔离载体运动
0 引言
惯导系统先后经历了从平台式到捷联式的发展过程,自光学陀螺出现后,基于其不敏感重力加速度、抗冲击力强、成本低、寿命长等特点,出现了一类新型惯导系统——旋转调制惯导系统。旋转调制惯导系统中转位机构的旋转并没有提高光学陀螺本身的精度,陀螺漂移依然存在,只是在一个旋转周期内抵消惯性元件常值漂移引发的导航误差,提高定位精度,以满足船用长航时、高精度导航的定位要求。
隔离载体角运动是实现高精度导航的必要条件,既隔离载体的角运动,又能使之按照给定指令运动,实现惯性元件误差的自动补偿,两种运动叠加使载体角运动不会影响到旋转调制效果,并且转位机构还可用于自主标定和初始对准。本文所述为双轴旋转系统电机旋转控制技术研究内容,同时实现了系统方案所要求的十六次序旋转调制功能[1]。
1 系统组成与工作原理
结合系统导航结算和旋转变压器角位置测量,搭建一个不受载体运动影响的惯性稳定基准,以此为系统核心,设计可以实现隔离载体运动的旋转机构。本系统中,采用DSP作为控制器,实现两个电机轴的驱动控制,同时根据角度传感器提供内环和外环的位置信息以供系统解算[2-3]。
旋转机构的总体构成如图1所示,包括五个部分,分别是力矩电机、测角部分、驱动部分、控制器和上位机部分。双轴旋转系统要求转角读取精度高,框架旋转平稳,因此对执行元件的性能要求较高,具体为体积小、重量轻、低速运行平稳、大扭矩、可堵转、响应快速、线性度好以及调速方便等。根据结构设计和旋转方案的特点,本系统采用直流力矩电机作为执行元件。
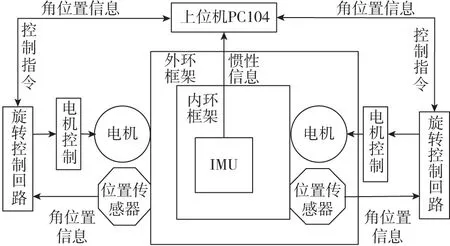
图1 旋转机构的总体构成Fig.1 General structure of rotating mechanism
双轴旋转系统可以看作是两个单轴旋转系统,只是每个轴的转动惯量不同,所以控制参数会不同,但控制原理结构都是一样的,因此本文只对单轴旋转控制的原理进行分析。
2 多通道数字控制器实现
2.1 数字控制器硬件线路实现
位置伺服控制系统硬件包括上位机、接口扩展,以及内框和外框控制回路电子线路。图2所示为单个旋转控制回路硬件线路图,该回路主要由信号采样、控制器、驱动输出、通信接口,以及电源和保护电路组成。
由图2可知,信号采样通道采用旋转变压器角位置信号采集线路,旋变模拟输入连接轴角转换芯片,然后通过并行线路接入DSP,同时DSP输出控制信号对轴角转换芯片进行使能,并且DSP可以采集轴角转换器速度数字量输入。控制单元采用TI DSP及其最小系统线路;采用DA芯片将控制算法计算所得数字量转化为模拟电压,然后通过MSK驱动模块进行功率放大,最终转化为电机驱动电压。在这条电压驱动放大通道中,添加了模拟速度阻尼线路,将轴角转换芯片采集转化出的转速模拟量与DA输出做减法运算,然后再驱动输出。TI DSP自身具备CAN总线模块,用于实现上位机和DSP之间电平信号转换。
2.2 数字控制器信号流程实现
硬件线路架构搭建完备以后,需要建立系统各功能模块的通信接口,实现数据采集、传递和输出,具体信号流程如图3所示。
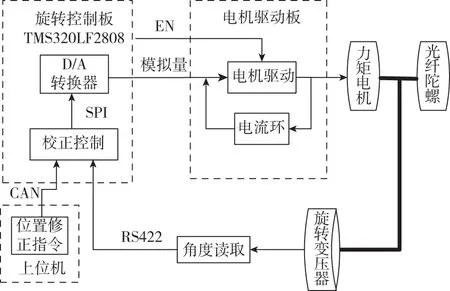
图3 单框稳定回路控制系统信号流程图Fig.3 The signal flow graph of single frame stability loop control system
本系统中,陀螺信号采样频率为400Hz,为匹配该频率,旋变角位置信号更新频率同样设定为400Hz。通过上位机底板上的FPGA统一规划角度信号和陀螺信号的时序,使参与解算的数据保持时统。上位机接受测量解算板发送来的姿态信息,通过解耦运算获得各轴电机的驱动量,上位机通过CAN协议发送至旋转控制板。旋转变压器与直流力矩电机在结构上同轴连接,由旋转变压器提供框架位置信息,并发送至位于控制板上的轴角转换模块,轴角转换模块读取旋变的粗精通道输出,经耦合处理后得到20位的数字量,然后通过缓存芯片将数字量存放至DSP的数据总线上,以备读取。
3 载体隔离控制方案及软件实现
3.1 控制方案的确定
在实际双轴旋转调制惯导系统中,惯导系统固连在载体上,随载体姿态变化而相对地理系运动,这样就导致了框架单纯以固定速度旋转时,无法完全抵消掉陀螺的常值漂移量,使导航精度受到影响。
为了实现载体在姿态运动过程中,仍然保证陀螺常值漂移的作用效果得到完全抵消,就需要旋转框不仅能够按固定的速度旋转,还要叠加上载体姿态角速率在旋转轴上的分量,该分量是从导航解算结果中得来的。为实现这一功能,旋转系统在上位机中进行了位置隔离运算和控制指令发送。一方面,上位机接收当前旋转变压器传送过来的角位置信息;另一方面,接收测量解算板发送的载体姿态角速率信息,两者进行叠加,并参照控制周期,再叠加旋转角增量。系统对位置控制的要求是:一方面要有稳定平滑的瞬态响应,避免位置跟踪超调;另一方面位置稳态跟踪误差要小,以便获得高精度的位置控制功能。
图4所示为旋转系统实现框图,本系统包含了数字位置环、模拟速度回路和驱动器内置电流环。位置伺服是旋转系统所实现的最终目标,在本系统中,位置环校正采用PI环节,主要目的是实现位置无静差[4-6]。

图4 旋转控制系统框图Fig.4 The simplified block diagram of rotation control system
3.2 控制软件实现
结合上文所述的位置随动控制系统,在旋转控制线路板的DSP上编制控制软件,包含系统配置、模式选择、控制算法等功能[7],具体过程如图5所示。
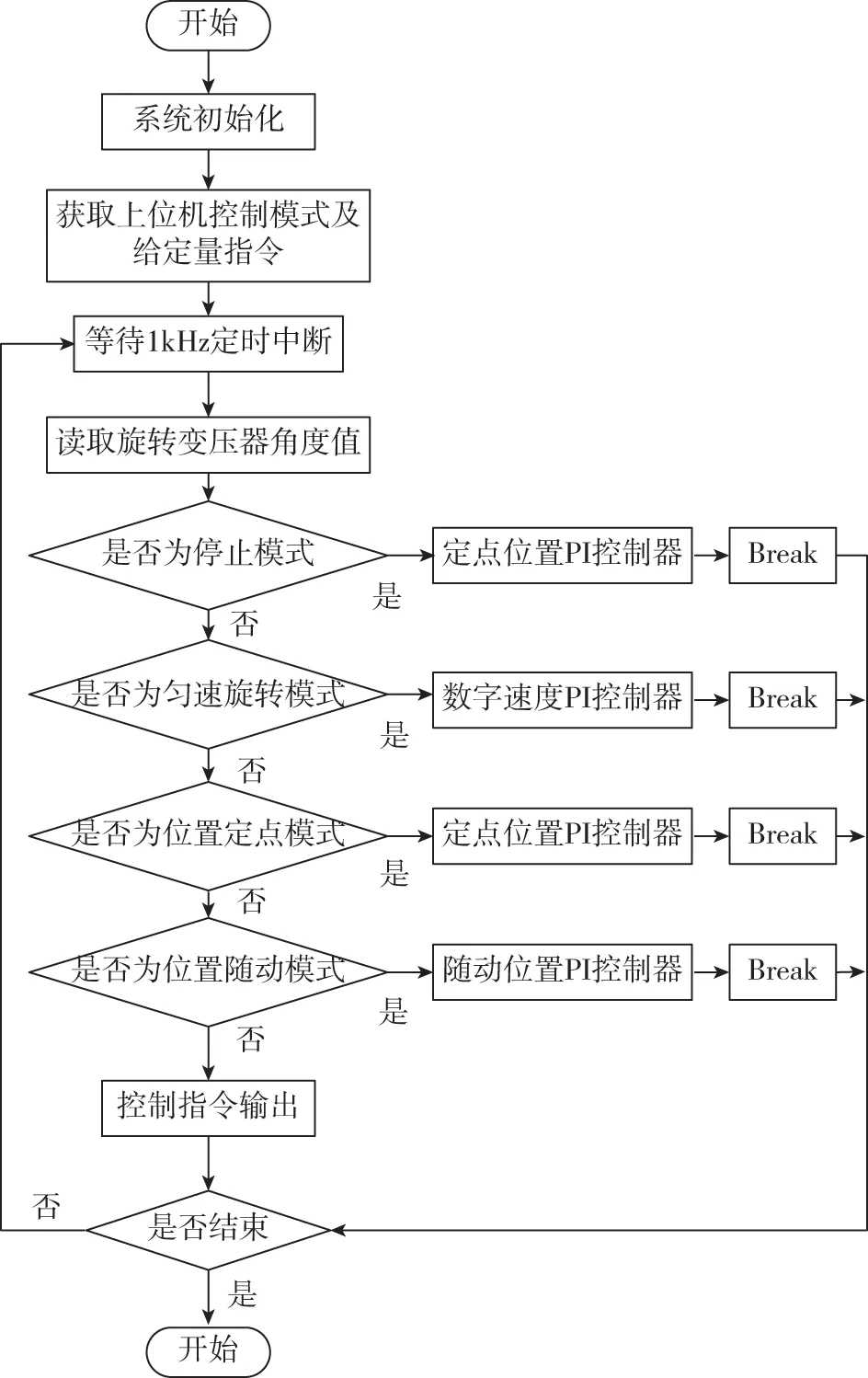
图5 控制软件流程图Fig.5 Flowchart of the control software
4 实验验证
4.1 静基座旋转控制性能验证
惯导系统在实验室静基座和摇摆台动基座两种工况条件下进行导航测试试验,内框和外框旋转次序按照方案设计要求执行,并且要求隔离掉航向和横摇两个姿态上的变化,保证因载体运动而引起的陀螺常值漂移误差被完全消除[8]。图6所示为静基座导航试验中外框的旋转角速度曲线,从曲线中可以大致看出,设定转速为6(°)/s时,框架旋转无速度静差,速度稳定性良好。
图7所示为外框旋转从静止起动到速度6(°)/s的响应过程,调节控制器旋转控制参数,统筹考虑框架抗干扰能力、稳态误差、响应时间、超调量等指标。由图7可得旋转控制的响应时间为0.09s,超调量为10%,稳态误差为0,转速稳定后5ms平滑波动范围为5.94~6.09(°)/s。
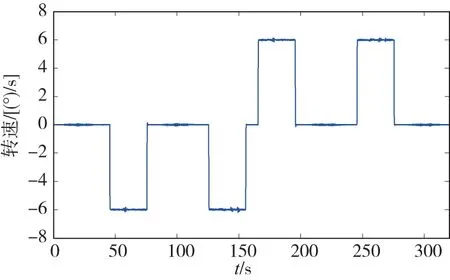
图6 静基座旋转速度曲线(外框)Fig.6 The curve of rotation speed on static base(outer frame)
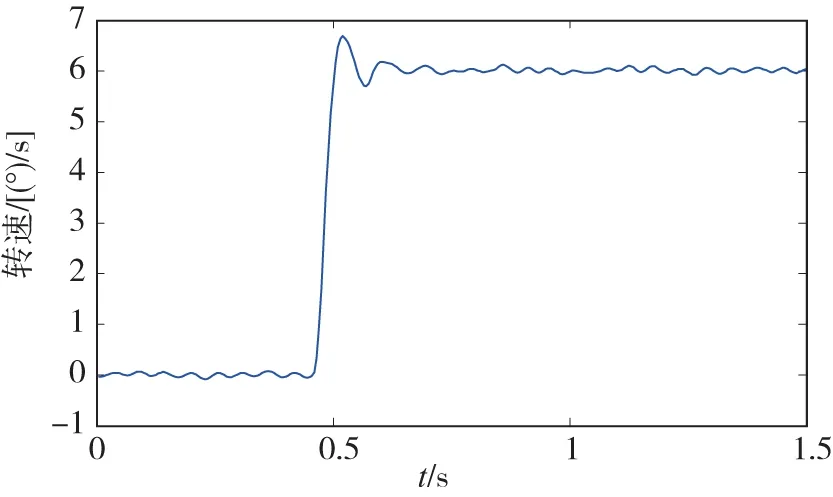
图7 静基座旋转速度阶跃响应曲线(外框)Fig.7 The response curve of rotation speed on static base(outer frame)
4.2 动基座载体隔离性能验证
在框架旋转的动静态指标满足静基座导航试验要求后,要实现惯导系统在载体运动时同样保持良好的工作性能。如上文所述,通过上位机添加位置闭环回路实现隔离载体运动,在双轴系统中,通过外框和内框的旋转控制可以隔离航向和横摇的姿态变化。本系统动态试验在实验室摇摆台上完成,摇摆台三个轴做周期性正弦运动,频率和幅值可以自行设定,本文以航向隔离为例进行说明。
图8所示为摇摆试验过程中的外框旋转速度曲线,从曲线中可以看出,外框旋转速度存在与静基座类似的旋转调制,该调制速度作为基波,其上叠加的正弦载波为抵抗载体航向变化所产生的角速度分量。图9所示为摇摆试验中IMU航向输出值,其波动范围约为0.01°,远低于摇摆台1.3°的摇摆幅值,隔离效率达到99%。
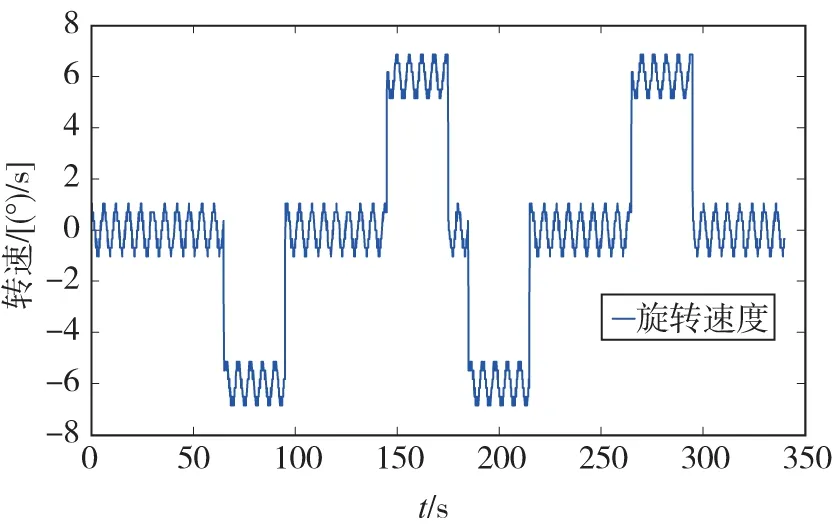
图8 摇摆试验中框架旋转曲线(外框)Fig.8 The frame rotation curve in swing test(outer frame)
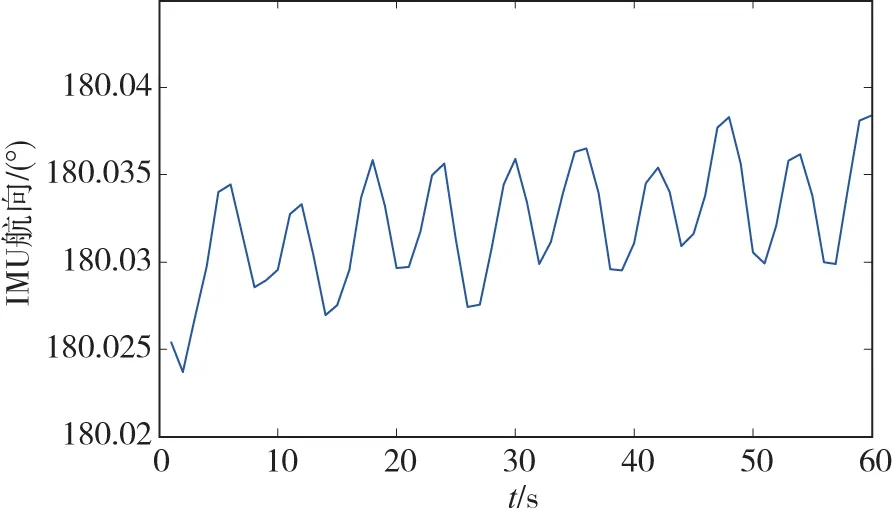
图9 摇摆试验中IMU航向曲线Fig.9 The IMU heading in swing test
5 结论
本文介绍了双轴旋转调制光纤陀螺捷联惯导系统的隔离载体运动实现方案,完成了框架旋转的系统级设计、元器件的选型、硬件线路设计、通信接口设计根据系统参数设计了模拟速度环和数字位置环调节器。经过试验验证,旋转控制系统在静基座和动基座条件下实现功能准确,快速性、稳定性等指标良好,为更好地发挥双轴旋转调制光纤陀螺捷联惯导系统的导航潜力提供了有效的保障。
[1] 袁保伦, 饶谷音.光学陀螺旋转惯导系统原理探讨[J].国防科技大学学报, 2006, 28(6): 76-80.
[2] 钱志恒, 周亚军.基于DSP和FPGA的运动控制器[J].机电工程, 2009, 26(1): 38-41.
[3] TMS320F2808 Digital Signal Processor Datasheet, 2001.
[4] 唐贤伦, 仇国庆, 李银国, 等.基于MATLAB的PID算法在串级控制系统中的应用[J].重庆大学学报: 自然科学版, 2005, 28(9): 61-63.
[5] 杜佳璐, 李如铁,杜深良.反馈控制系统串联校正器的计算机辅助设计[J].大连海事大学学报: 自然科学版, 2002, 28(4):106-109.
[6] 胡寿松.自动控制原理(第四版)[M].北京: 科学出版社, 2001.
[7] 王国臣, 袁保伦, 饶谷音,等.激光陀螺双轴旋转导航系统高精度转动控制的设计与实现[J].中国惯性技术学报, 2015, 23(4): 438-441.
[8] 翁海娜, 陆全聪, 黄昆,等.旋转式光学陀螺捷联惯导系统的旋转方案设计[J].中国惯性技术学报, 2009, 17(1): 8-14.
Implementation of the Carrier-Insulated Control for the 2-Axis FOG Strapdown Inertial Navigation System
YU Hao1, WU Guo-qiang1, GAO Feng1, TAN Qiu-yue2
(1.Tianjin Navigation Instrument Research Institute, Tianjin 300131, China;2.Heibei University of Technology, Tianjin 300401, China)
The performance of the framework rotation control such as stability, rapidity and accuracy is the important condition which is needed to ensure the potential excavation of the 2-axis strapdown Inertial Navigation System.In view of this demand, a 2-axis rotation control system was built.Both DC torque motor and resolver were used as staple hardware architecture.Besides, a high speed DSP control board was designed as a controller.The signal process was built, an appropriate PI control algorithm was designed and finally test was performed.The results showed that the effectiveness of IMU insulated attitude exceeds 99%, and this performance of the framework rotation control can meet the needs of the inertial navigation.
2-axis rotation; DSP; PI control; Carrier-insulated motion
10.19306/j.cnki.2095-8110.2016.04.002
2016-04-22;
2016-05-10。
总装预研项目(51309030101)
于浩(1964-),男,研究员,主要从事导航制导与控制方面的研究。E-mail:yuhao_707@126.com
U666.1
A
2095-8110(2016)04-0009-04
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
防爆电机(2021年2期)2021-06-09
意林(2021年10期)2021-05-28
数字海洋与水下攻防(2020年5期)2021-01-04
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
文教资料(2018年32期)2018-12-24
北京航空航天大学学报(2018年1期)2018-04-20
山东工业技术(2018年4期)2018-02-07