
粒子群优化神经网络的交通事件检测算法研究
2016-03-17 02:16向怀坤李伟龙谢秉磊
计算机测量与控制 2016年2期
向怀坤,李伟龙,谢秉磊
(1.深圳职业技术学院,广东 深圳 518055; 2.中国民航大学,天津 300300;3.哈尔滨工业大学深圳研究生院,广东 深圳 518055)
粒子群优化神经网络的交通事件检测算法研究
向怀坤1,李伟龙2,谢秉磊3
(1.深圳职业技术学院,广东 深圳518055; 2.中国民航大学,天津300300;3.哈尔滨工业大学深圳研究生院,广东 深圳518055)
摘要:为减少交通事件引起的交通延误,提出一种基于粒子群优化神经网络的交通事件检测算法;首先,利用车载激光测距仪和GPS设备作为实验平台,采集了反映路段车辆占有率及车辆运行速度特征的交通参数;其次,利用粒子群(PSO)算法训练随机产生的初始化数据,优化BP神经网络连接权值和阈值;最后,将PSO优化后的BP神经网络作为分类器进行交通事件的自动分类和检测;试验中比较了PSO神经网络算法、BP神经网络算法和经典算法对交通事件的检测效果,PSO神经网络算法在事件检测率(DR)、平均检测时间(MTTD)方面均优于其他目标算法;结果显示,粒子群优化的神经网络算法用于交通事件检测提高了检测性能。
关键词:交通事件检测;粒子群优化;BP神经网络;激光测距仪;GPS
0引言
交通事件发生的时间地点具有不确定性,事件一旦发生,容易造成偶发的交通拥堵,甚至发生交通事故。因此,为了快速检测交通事件,及时疏导拥挤交通,最大限度地减轻交通事件带来的影响,研究快速有效的交通事件检测智能算法已成为交通研究领域的热点。调查表明[1-3],现有的交通事件自动检测(automatic incident detection,AID)主要是采用地埋式线圈车辆检测器等固定型设备采集交通数据,通过分析这些参数,估计所在路段的交通状况,采集的交通数据的缺乏及时性和准确性。新一代移动、实时、海量交通信息采集技术的广泛应用,对传统的依靠道路断面车辆检测数据来判别交通事件的研究工作提出了新的挑战,如何从海量的多源数据中准确、快速提取出交通事件是新的数据形态下交通事件检测领域需要着重研究的问题。
目前随着人工智能技术的发展,人工神经网络尤其是BP神经网络被广泛运用于交通事件自动检测[4-6]。由于BP神经网络初始的权值和阈值是随机选取的,若这些参数的位置选取不当,则会导致网络的收敛慢、容易陷入局部最优值[7]。粒子群优化算法(particle swarm optimization,PSO)是基于群体的演化算法,通过个体间的信息交换达到整个群体的共同演化,具有收敛速度快、鲁棒性高、全局搜索能力强等优点[8]。利用粒子群算法的全局搜索能力优化神经网络的拓扑结构、连接权值和阈值,不仅能发挥神经网络的泛化能力和学习能力[9],还能提高神经网络的整体搜索效率。
本文提出一种粒子群优化神经网络的交通事件检测算法。基于激光测距仪和GPS采集的移动数据,将交通事件作为一个分类问题,利用粒子群优化算法替代BP算法对神经网络的连接权值和阈值进行优化,以激光测距仪测得的与前车的距离值和GPS测得的瞬时速度值在连续时间内的平均值为特征作为优化后的神经网络分类器的输入,以交通正常、交通拥挤、拥挤加剧和拥挤减缓4种交通状态作为分类器的输出,进行交通事件的自动分类与判别。
1基于粒子群的神经网络优化
1.1粒子群优化算法
粒子群算法中,每个个体称为一个“粒子”,对应每个优化问题的解。通过初始化一群随机粒子,利用迭代方式,使每个粒子向自身找到的最好位置和群体中最好粒子靠近,从而搜索最优解。迭代终止条件一般选为最大迭代次数和粒子群迄今为止搜索到的最优位置[10]。

(1)
(2)

1.2基于PSO的BP神经网络优化算法
应用粒子群算法优化BP神经网络时,首先定义粒子群的位置向量xi的元素为BP神经网络所有的连接权值和阈值ωij、θj、ωjk、οk。初始化位置向量xi,然后用PSO算法搜索最优位置。定义适应度函数[9]如下:
(3)

粒子群算法优化神经网络的算法流程如图1所示,其算法步骤为:
第一步:初始化参数。设置BP神经网络的拓扑结构,将神经网络的连接权值和阈值编码为粒子;设定粒子的最大速度Vmax和最小速度Vmin,设定粒子初始位置最大值xmax和最小值xmin,在取值范围内随机初始化粒子的速度和位置;设置惯性权重初值ω,加速因子初值c1、c2,种群规模m,迭代次数N和设定终止条件等。
第二步:计算粒子适应度值。比较粒子当前的适应度值和个体及群体最好位置的适应度值,更新粒子的个体极值pBest和全局极值gBest。
第三步:根据式(1)和式(2)更新粒子的速度和位置。
第四步:检验算法迭代终止条件。若符合,则终止迭代,输出神经网络的连接权值和阈值,否则转到第二步。
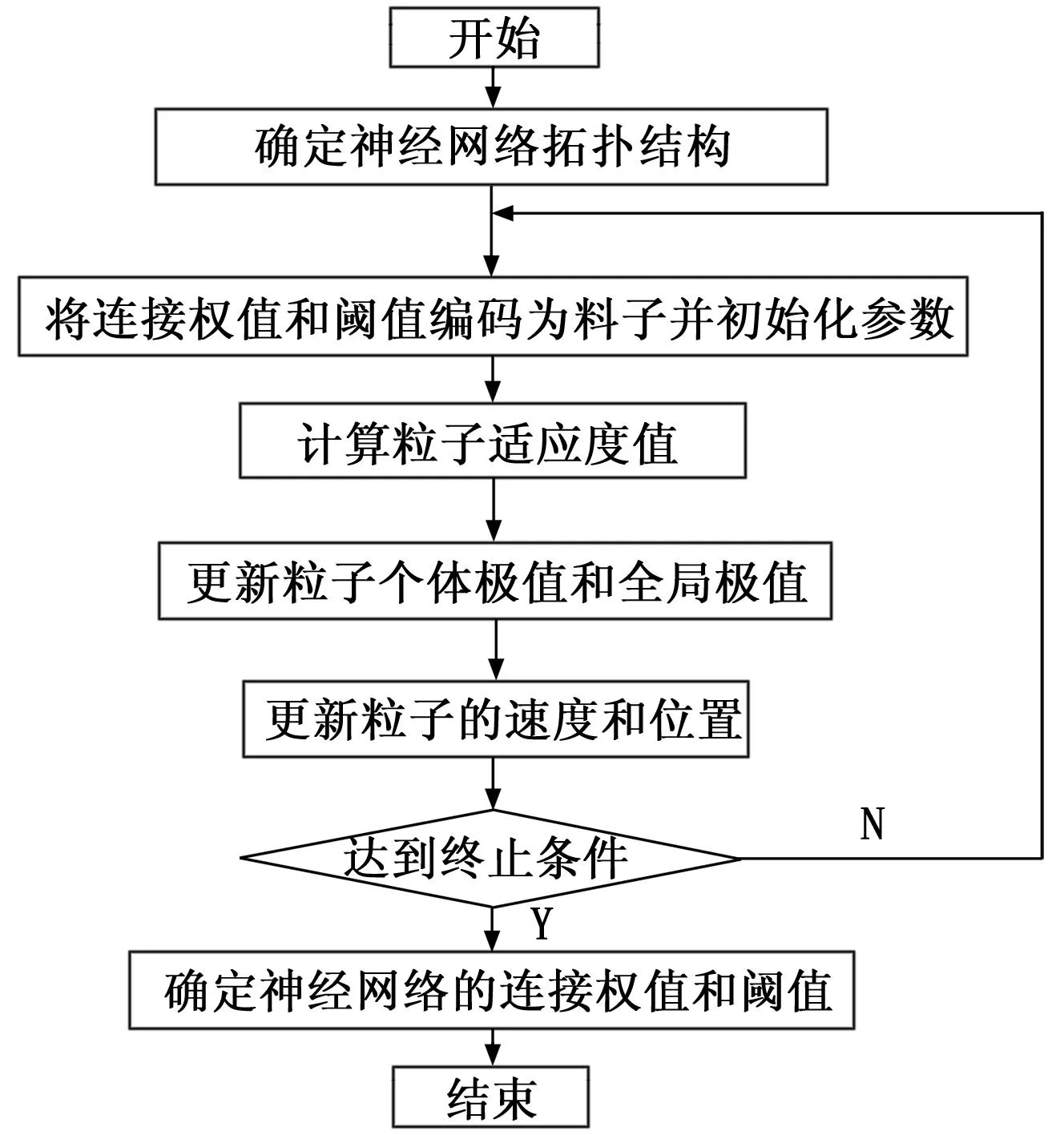
图1 PSO优化神经网络算法流程图
2基于粒子群优化的交通事件检测
本文将交通事件划分为交通正常、交通拥挤、拥挤加剧、拥挤减缓4种状态,通过宏观交通流参数的变化特征去实现这4类交通状态的判别,本质上是一个分类问题,主要分为特征量的选择和事件检测算法设计两大部分。
2.1交通事件检测的特征量选择
研究表明[11],当交通事件发生的时候,相关交通流参数也会发生变化。采用车载激光测距仪和GPS浮动车作为数据采集设备。根据相关研究[12],车载激光测距仪采集与前车的距离值可间接反映道路占有率的状态,具体表现为:在道路通畅时,一段时间内距离值变化量较大,在道路拥堵时,一段时间内距离值较小且变化量较小;而GPS浮动车采集的单车瞬时速度可反映道路交通流的运行状态,具体表现为:在道路通畅时,GPS浮动车的瞬时速度值较高,在道路拥堵时,拥堵路段附近GPS浮动车的瞬时速度值普遍较低。这样的变化规律反映了道路交通流的变化,可以用来进行事件检测。
参考相关研究[13],本文取车辆速度低于20 km/h持续5 min以上判定为交通拥堵事件。为了准确检测由于交通事件引起的交通流参数的变化,需要测量一段持续时间所选参数,比较多个时间时隔内测得的距离平均值和瞬时速度平均值。选取采样时刻为T-3,T-2,T-1,T,T+1,T+2,T+3,取时间间隔为60 s,对每个时间间隔内的60个数据取平均值,计算方法为:
(4)
(5)

2.2基于粒子群优化的交通事件检测算法
2.2.1基于粒子群优化的神经网络结构设计
BP神经网络的隐含层节点数对BP网络预测精度有较大的影响,根据参考公式确定节点数的大概范围,然后采用试凑法确定最佳的节点数为13层。输出层有4个节点,分为4种状态:{1}、{2}、{3}、{4},状态{1}代表无事件发生交通正常,状态{2}代表有事件发生交通拥挤,状态{3}代表拥挤加剧,状态{4}代表拥挤减缓。本文所采用的BP神经网络选取为12×13×4的结构,即网络由输入层(Input Layer)、隐层(Hidden Layer)和输出层(Output Layer)共3层组成。其中输入层有12个节点,隐层有13个节点,输出层有4个节点。网络结构如图2所示,其中ωij、θj为PSO优化后的神经网络输入层到隐层的连接权值和阈值,ωjk、οk为隐层到输出层的连接权值和阈值。
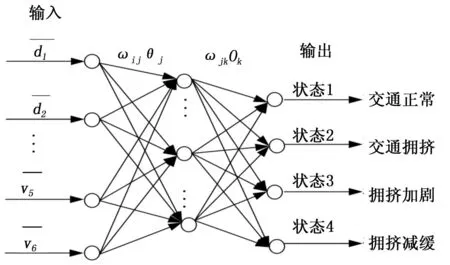
图2 事件检测神经网络结构图
2.2.2基于粒子群优化的交通事件检测算法设计
PSO优化神经网络事件检测过程如下:
第一步:数据准备。读取激光测距仪和GPS采集的数据,对数据进行预处理,按照式(5)和(6)计算输入特征向量的值,进行归一化处理,制作样本数据。
第二步:根据输入输出情况,构建合适的BP神经网络结构。
第三步:利用粒子群算法优化BP神经网络,确定最优的连接权值和阈值,更新BP神经网络。
第四步:加载测试数据,利用更新的BP神经网络进行分类判别,得出分类结果。
3实验过程及结果分析
3.1实验过程
仿真实验在一台Inter i3内存4G的计算机上使用Matlab 2013a进行。实验数据来自深圳市南山区易发生交通拥堵的某一路段实地采集。通过在试验车上装载激光测距仪和GPS设备进行数据采集,激光测距仪和GPS的采样时间均为1 s,激光测距仪的最大量程为100 m。选取早中晚高峰期两小时的时间段作为一个时间单位,连续测量多次,选取每组有事件发生的样本数据为6 min,整理得到共200组样本数据。其中,选取样本数据中的150组作为训练数据,另外50组作为测试数据。先对样本进行归一化,再利用本文提出的方法进行训练,最后对测试样本进行分类判别。
PSO参数设置[14-15]如下:维数D=12*13+13*4+4=212,种群数量m=30,加速因子c1=c2=1.49,惯性因子ω=0.729;r1、r2为[0, 1]区间内的随机数;最大迭代次数N=100;速度最大值Vmax和最小值Vmin分别为1和-1,位置最大值和最小值分别为5和-5;终止条件为循环达到终止迭代次数;适应度函数定义为预测误差平方和,如公式(3)所示。
3.2结果分析
表1给出了部分原始样本数据,其中,采样时间间隔的平均值通过公式(4)和(5)求得。表2采用离差标准化方法,对原始数据进行线性变换,使结果值映射到0~1之间,转换函数如下:
(6)
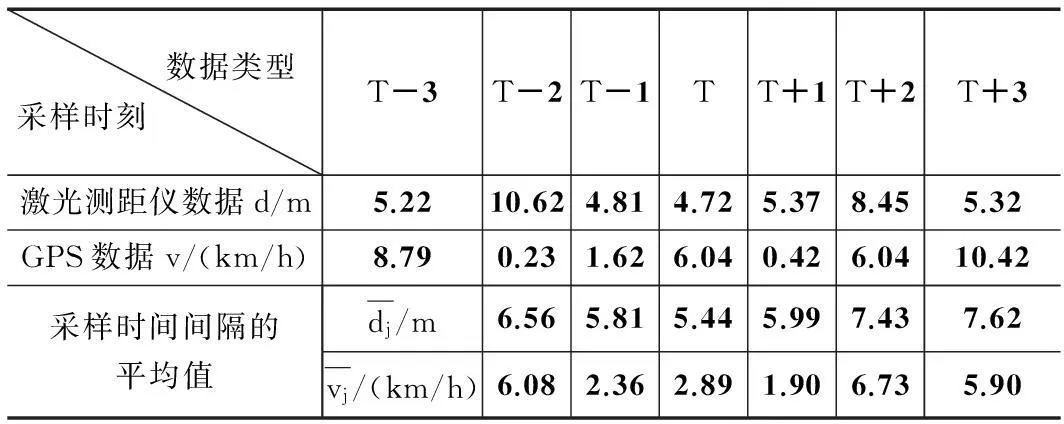
表1 部分原始样本数据表
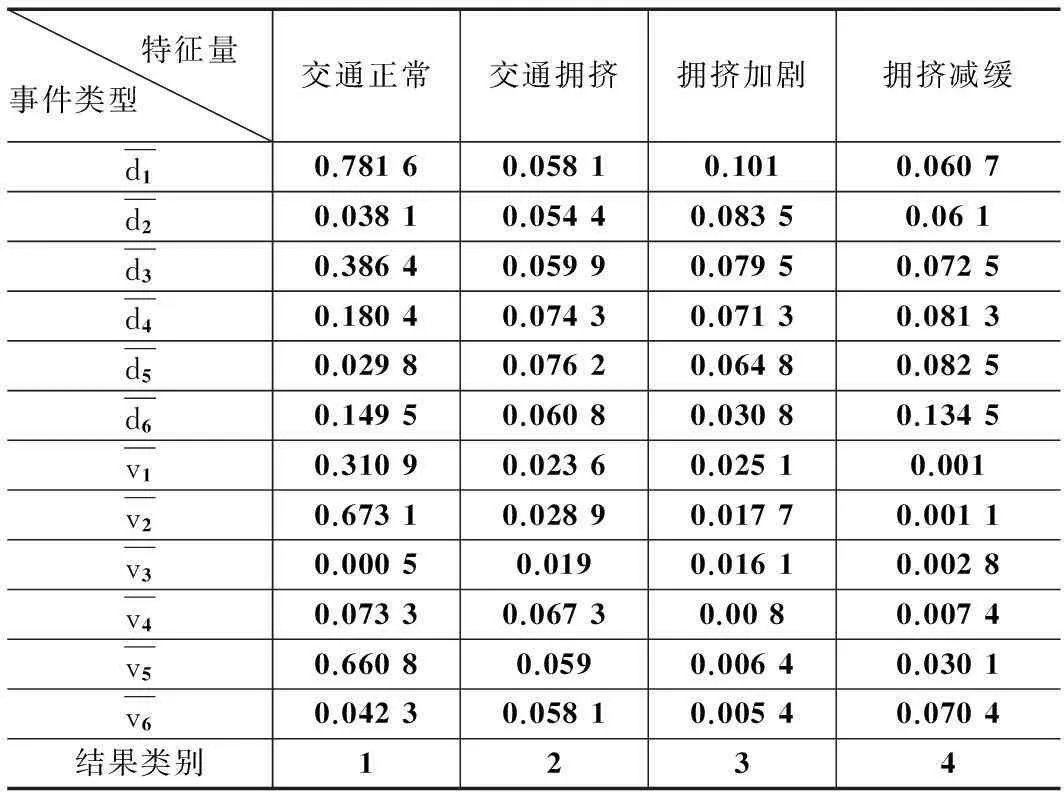
表2 部分标准化样本数据检测结果表
常用的评价交通事件自动检测算法效率的指标主要有3个:交通事件检测率(DR),交通事件误判率(FAR)及交通事件平均检测时间(MTTD)。对样本数据根据本文提出的算法进行训练,训练结束后,再利用测试数据进行分类器测试,得出分类结果,最后与经典事件检测算法和BP神经网络算法[5]作比较,比较结果如表3所示。可以看出,粒子群优化的BP神经网络检测率要高于经典算法和BP神经网络算法,达到96%,50个测试样本只有2个与期望不一致,在平均检测时间上比BP神经网络减少一半。综上所述,粒子群优化的BP神经网络算法性能更好。
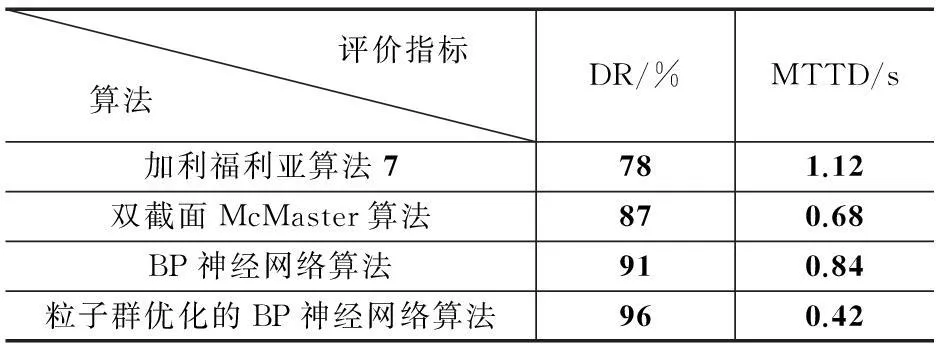
表3 实验结果比较表
4结论
针对固定车检器采集交通数据的局限性和BP神经网络具有收敛速度慢,容易陷入局部极值点等问题,基于激光测距仪和GPS设备采集的移动数据,本文将交通事件检测看作为一个分类问题,提出了一种基于粒子群优化神经网络的交通事件检测算法。利用粒子群优化算法对BP神经网络的连接权值和阈值进行优化,将车载激光测距仪和GPS浮动车采集的数据用作优化的神经网络的输入,进行交通事件的分类判别。结果表明,检测效果优于经典算法和BP神经网络算法。
下一阶段的研究重点将放在以下几个方面:粒子群算法的优化,针对多车道的数据采集以及海量数据的情况下事件的快速检测等等,对这些问题的系统研究更有助于算法效果的提高以及交通管理的实际应用。
参考文献:
[1] 张萌萌,贾磊,邹难.基于粗模糊神经网络的高速公路路段交通事件识别[J].公路,2010,12:113-117.
[2] 郭艳玲,吴义虎,黄中祥.基于小波分析和SOM 网络的交通事件检测算法[J].系统工程,2006,24(10):100-104.
[3] 樊小红.基于遗传算法的交通事件检测研究[D].西安:长安大学,2002.
[4] 邱世卉,王琪.基于BP 神经网络的高速公路交通事件检测[J].中国测试,2009,35(2):48-52.
[5] 姜紫峰,刘小坤.基于神经网络的交通事件检测算法[J].西安公路交通大学学报,2000,20(3):67-69,73.
[6] 姜桂艳,温慧敏,杨兆升.高速公路交通事件自动检测系统与算法设计[J].交通运输工程学报,2001,1(1):77-81.
[7] 王德明,王莉,张广明.基于遗传BP神经网络的短时风速预测模型.浙江大学学报(工学版),2012,46(5):837-894.
[8] Srinivasan D.Traffic incident detection using particle swarm Optimization[A]. Proceedings of the 2003 IEEE Swarm Intelligence Symposium[C],2003:144-151.
[9] 余华,黄程韦,金赟,等.基于粒子群优化神经网络的语音情感识别[J].数据采集与处理,2011,26(1):57-62.
[10] 郭聪莉,朱莉.一种基于PSO的BP神经网络训练方法[J].计算机与信息技术,2007,Z1:15-16,19.
[11] 党长青,张景辉,沈志远.基于Boosting算法和RBF神经网络的交通事件检测[J].计算机应用,2007,27(12):3105-3107,3080.
[12] 罗云林,李伟龙,向怀坤.激光测距仪/GPS下城市道路SVM-AID算法研究[J].中国安全科学学报,2015,25(4):81-86.
[13] 祝付玲.城市道路交通拥堵评价指标体系研究[D].南京:东南大学,2006.
[14] Clerc M,Kennedy J.The particle swarm-explosion,stability and convergence in a multidimensional complex space[J]. IEEE Transactions on Evolutionary Computer,2002,6(1):58-73.
[15] 闫纪如.粒子群优化的神经网络在交通流预测中的应用[D].杭州:浙江工业大学,2013.
Research on Traffic Incident Detection Algorithm Based on Particle Swarm Optimizer Neural Network
Xiang Huaikun1, Li Weilong2, Xie Binglei3
(1.Shenzhen Polytechnic, Shenzhen518055, China; 2.Civil Aviation University of China, Tianjin300300,China;3.Shenzhen Graduate School, Harbin Institute of Technology,Shenzhen518055, China)
Abstract:A new method was proposed for traffic incident detection based on particle swarm optimizer neural network. At first, the vehicular laser rangefinder and GPS equipment were used as the experimental platform, which collected the traffic parameters including the road vehicle occupancy rate and the vehicle running speed;Secondly,the particle swarm optimizer(PSO) was used to train the random initial data to optimize the connection weights and thresholds of the back-propagation(BP) neural network;Finally The BP neural network after optimization was used to classify traffic incidents automatically. In the detection experiment, PSO neural network, BP neural network and traditional algorithms were compared in the same testing environment. PSO neural network was superior to the other objective algorithm in incident detection rate(DR) and mean time to detection(MTTD).Results showed that particle swarm optimizer neural network brought a promising improvement in the detection capability for traffic incident detection.
Keywords:traffic incident detection; particle swarm optimizer; BP neural network; laser rangefinder; GPS
文章编号:1671-4598(2016)02-0171-04
DOI:10.16526/j.cnki.11-4762/tp.2016.02.047
中图分类号:TP301
文献标识码:A
作者简介:向怀坤(1971-),男,四川南部人,副教授,博士,主要从事城市交通智能化应用研究。
基金项目:国家自然科学基金项目(71473060)。
收稿日期:2015-08-05;修回日期:2015-09-07。
猜你喜欢
测控技术(2018年12期)2018-11-25
价值工程(2017年8期)2017-03-25
卷宗(2017年1期)2017-03-17
计算机应用(2016年12期)2017-01-13
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年16期)2016-06-29
现代电子技术(2015年16期)2015-11-17
