并行激光雷达接触网高度快速检测系统
2016-03-21 02:30刘显录
轨道交通装备与技术 2016年1期
刘显录 赵 建
(1.长春轨道客车股份有限公司 吉林 长春 130062;2.中国科学院长春光学精密机械与物理研究所 吉林 长春 130062)
并行激光雷达接触网高度快速检测系统
刘显录1赵 建2
(1.长春轨道客车股份有限公司 吉林 长春 130062;2.中国科学院长春光学精密机械与物理研究所 吉林 长春 130062)
接触网高度检测系统采用了多个激光雷达以并行的方式对电力机车接触网导线高度进行等间隔循环扫描测量,满足了电力机车受电弓反馈的实时性要求。
接触网;高度测量;激光雷达;太阳高度角
目前,电气化铁路已成为机车的主要能源供给方式,电力机车在运行过程中,不断通过受电弓以滑动摩擦的方式从接触网供电系统持续获得电能。但是,由于接触网分布、搭建等客观原因,其高度存在一定起伏,使受电弓在滑动过程中产生一定程度的振动,进而产生电弧放电,影响机车供电效率,严重时还会导致安全故障。因此,大力发展接触网高度快速测量,为受电弓提供预测反馈数据,有利于促进受电弓与接触网的良好接触,提高铁路运输的整体供电效率[1-5]。
接触网高度测量主要分为两大主流方向,即接触式测量与非接触式测量[5-6]。接触式测量,一般是在受电弓上安装角位移传感器,受电弓弓板高度发生变化时,主轴的角度发生变化,根据此角度变化值即可反演出接触网的高度变化[7]。非接触式测量主要是基于光学原理,一端由光源对准接触网发射准直光束,另一端由探测器接收反射光束,根据光束在探测器靶面的投影位置得出接触网高度[8]。
接触式测量一般为间接式测量,无法真实反映出接触网高度的实际变化情况,因而不能为受电弓提供反馈预测,而非接触式测量则可有效规避上述问题,同时不会对被检测受电弓的力学特性产生任何影响,所以成为当前主流的测试手段。但是,现有非接触式测量大多基于光学方法,容易受到外界光线环境干扰,特别是接触网高度测量大部分是以天空为背景,在太阳直射的情况下,会在一定程度上影响测量结果,因此应在减弱非相干光源干扰等方面加以改进。本文所设计的接触网高度快速检测系统(见图1),在现有的非接触式测量设备的基础上,增加了GPS太阳高度角定位模块,通过激光雷达对准角度的反向调整使其尽量避免太阳直射对测量结果的影响,测量示意图如图2所示。

图1 接触网高度快速检测系统测试主界面

图2 测量示意图
1 系统的硬件结构
该接触网高度检测系统主要由激光雷达阵列、GPS太阳高度角定位模块、数据采集及处理模块、激光雷达对准角度调整结构、接触网高度输出模块等几部分组成(见图3),固定在电力机车顶部受电弓装置附近。

图3 系统组成框图
1.1 数据采集及处理模块
作为整个系统的数据处理及时序控制的核心部分,采用FPGA+DSP双处理器结构。其中,FPGA用于时序信号的产生、信号采集芯片的驱动、控制命令的收发;而DSP则主要是用于高速信号的提取与处理。
1.2 激光雷达阵列
为了减小受电弓的单点磨损,接触网沿导轨的水平方向呈“之”字形分布,因此,不同时刻接触线与受电弓接触点位置不同。要想测量其当前高度,必须首先对其位置进行快速定位后再进行测量。在实际测量中,接触网高度起伏在5.3 ~6.5 m,去除车体及结构高度,测量高度范围小于2 m。由于动车的接触网线径为12.9 mm,为检测出接触线高度,要求激光雷达角分辨率不大于0.37°即可[9]。为此,本系统选择UTM-30LX-EW型2维激光扫描雷达对机车上方接触线可能存在的位置进行快速扫描,通过信号处理,可计算出当前接触网位置和高度。该雷达测量范围270°,可在100 000lx光强下工作,且扫描角分辨率高达0.25°。与本文数据采集及处理模块相结合,单次扫描及高度测量时间小于30 ms。
为了进一步缩短单次测量时间,提高检测频率,采用了激光雷达阵列结构。该结构由若干激光雷达排列组成,用于实现对当前接触网高度进行等间隔分时循环采样,时序图如图4所示,以进一步提高测量频率。本系统采取的雷达阵列数为2。
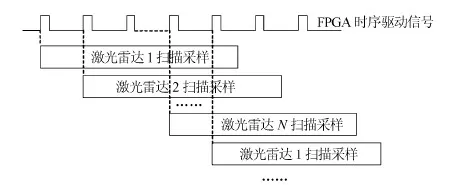
图4 激光雷达阵列时序图
1.3 GPS定位模块及雷达对准角度调整结构
本系统通过GPS模块实时获取机车当前位置、时间信息,计算出当前太阳高度角后,根据计算的角度通过反向调整激光雷达的对准角度调整结构,使雷达阵列背对太阳的角度进行接触网高度测量,以避免太阳直射的影响。为了避免对准角度调整结构的频繁调整对测量速度产生影响,仅将机车上表面以上的半球空间平分为两大部分,如图5所示。当太阳高度角位于空间1范围内时,调整雷达阵列对准1位置;当太阳高度角位于空间2范围内时,调整雷达阵列对准2位置。只有太阳高度角在空间1和空间2发生角度变换时,才进行角度调整,其他时刻雷达阵列位置保持不变,从而避免了调整结构的频繁扰动。
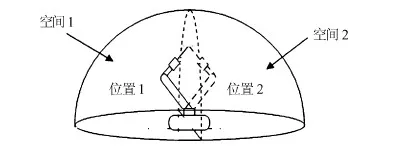
图5 激光雷达对准角度调整示意图
1.4 接触网高度输出模块
每次接触网高度计算结束后,实时通过该模块的RS485串行接口将计算结果反馈给受电弓控制器,以便为受电弓的搭接角度提供信息参考。
2 系统的软件控制流程
结合上述硬件部分的描述,本检测系统主要实现如下功能:GPS信息采集及太阳高度角计算、雷达阵列对准角度的调整、雷达阵列的驱动与数据采集、接触网高度的数据处理与计算、检测结果的反馈输出。系统流程图如图6所示。
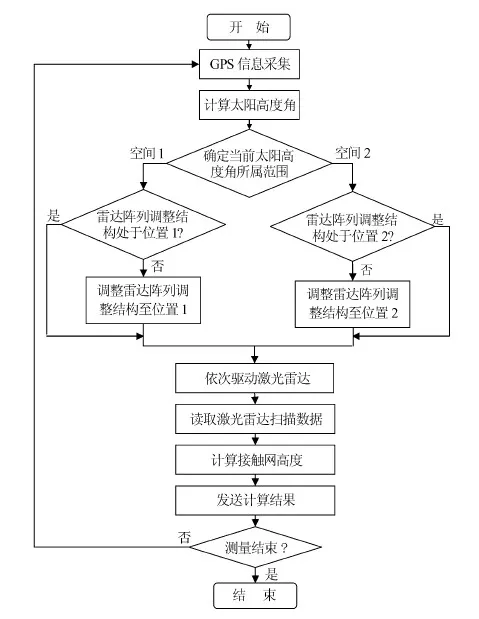
图6 系统控制流程图
设备在运行过程中,数据采集及处理模块首先利用GPS定位模块,读取机车当前的位置和时间信息,按照太阳高度角计算公式对当前位置太阳高度角进行计算。根据计算得到的太阳高度角范围,按照图5方式,通过角度调整结构对激光雷达阵列的对准角度进行判断和调整。角度调整结束后,数据采集及处理模块通过时序驱动信号,对激光雷达阵列依次进行等间隔驱动控制,如此循环往复。激光雷达阵列将采集到的扫描数据依次传输给数据采集及处理模块。数据处理模块将扫描数据进行提取和计算,将计算结果实时反馈给受电弓控制器,以实现对接触网高度的持续测量。
3 实验结果
检测精度是衡量整个系统性能的最为关键性的指标。利用该系统分别对500 mm、1 000 mm、1 500 mm、2 000 mm的给定距离进行100次连续测量,测得的误差范围分别为±14 mm、±10.5 mm、±10.5 mm和±8.5 mm。
在500 ~2 000 mm测量范围内,本系统的测量精度小于±15 mm。此外,在系统实时性方面,通过实际测量,平均单次采样及处理时间小于16 ms,即测量频率小于50 Hz。
4 结论
非接触式接触网高度快速检测系统与现有常规接触网高度检测设备相比,引入了多个激光雷达等时差并行循环测量,大大缩短了单次扫描与测量所消耗的时间。此外,还将太阳高度角测量模块引入系统中,作为参考值反向调整激光雷达测量时的对准角度,进一步降低太阳直射对测量结果造成的干扰,增强了系统的适应性和稳定性。
[1] 占 栋,于 龙,肖 建,等.接触网几何参数高速动态视觉测量方法研究[J].仪器仪表学报,2014,35(8):1852-1859.
[2] 林邓伟,李东亮.铁路接触网导线几何参数的激光测量系统[J].电子器件,2015,38(1):174-177.
[3] 王春革.铁路接触网融冰电器系统设计[J].工业控制计算机,2015,28(2):113-115.
[4] 郭晓旭,刘志刚,张桂南,等.角点配准与图像查分的接触网绝缘子故障检测[J].电力系统及其自动化学报,2015,27(2):8-14.[5] 马金芳,于 龙.我国地铁接触网检测现状及发展趋势[J].都市快轨交通,2013,26(2):26-29.
[6] 彭朝勇.便携式接触网导线几何参数检测系统[D].四川:西南交通大学,2005.
[7] 朱德胜.德国接触网动态检测技术[J].电气化铁道,2004(3):13-17.
[8] 牛大鹏.非接触式接触网几何参数检测系统研究[D].四川:西南交通大学,2004.
[9] 中华人民共和国铁道部.TB/T 2809—2005电气化铁道用铜及铜合金接触线[S].北京:中国铁道出版社,2005.□
(编辑:缪 媚)
2095-5251(2016)01-0047-03
2015-07-09
刘显录(1976-),男,本科学历,高级工程师,从事轨道列车调试、检测技术研究工作。
吉林省重点科技攻关项目(No.20140204058GX)
TP39
B
猜你喜欢
北京测绘(2022年5期)2022-11-22
铁道机车车辆(2022年1期)2022-03-24
云南画报(2021年10期)2021-11-24
汽车观察(2021年8期)2021-09-01
铁道学报(2020年8期)2020-09-07
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年4期)2016-05-17
铁路技术创新(2015年3期)2015-12-21