
一种改进的卡尔曼滤波算法在测量移动物体参数中的应用
2016-03-22 22:13闫庆祥殷守林李航
电脑知识与技术 2016年2期
关键词:卡尔曼滤波
闫庆祥 殷守林 李航
摘要:测量设备中最复杂的问题之一是提供与之相关所需的动态测量系统的精度来确定移动目标的参数。该文就提出了一种基于卡尔曼滤波的算法来提高测量动态系统参数的精确度。该算法旨在消除许多干扰源的影响,然而,其总效应会引起相当大的测量信号的失真。该算法设计模型用来构建无陀螺测量系统。由于可以开发动态精度高、低成本的测量系统,该算法设计基于一个动态系统中使用最广泛的元素,即物理摆。文中展示的实验结果证实了该算法的有效性。
关键词:卡尔曼滤波;动态误差;无陀螺测量系统;物理摆
中图分类号:TP391 文献标志码:A 文章编号:1009-3044(2016)02-0222-03
Abstract: One of the most complicated problems in measuring equipment is that it requires to provide the related dynamic precision of the measurement system to determine the parameters of the moving targets. This article proposes a algorithm based on Kalman filter to improve the measuring precision of the dynamic system parameters. The algorithm is designed to eliminate the influence of many interference sources, however, the overall effect can cause considerable measurement signal distortion. The design model of this algorithm is used to build no-gyro measurement system. In that it can develop a dynamic measurement system with high precision, low cost, the design of algorithm is based on a dynamic system, which is the most widely used elements named physical pendulum. This experimental results in paper prove the effectiveness of the proposed algorithm.
Key words: Kalman filte; dynamic error; no-gyro measurement system; physical pendulum
众所周知,大部分现有的测量系统都是非线性的,非线性系统理论[1]是一个复杂非强壮的理论。因此,对非线性系统做出一定的分析具有很大的帮助。同时,有太多的非线性测量系统通过引入一定数量的简化假设来进行线性化,也就是说,测量结果是通过线性数学模型确定的而不是非线性模型。另一方面,当组成测量系统的精确特性时,大多数的测量系统的非线性特性是非常重要的。在某些情况下,线性模型的应用会导致很大的测量误差。此外,大多数的测量系统的复杂性和各种各样的属性不允许使用一个通用的方法进行分析与合成。
例如,在一些测量系统中,当寻求最优的信号处理算法时,必须使用某种测量信号和干扰的影响的统计模型。也形成了一些概念,如线性概念、稳定性和正态分布,但是这些概念并不经常应用在实际中。对于这个问题的可能解决方案就是自适应算法的应用,允许测量系统的自适应控制取决于输入信号的统计参数。在这种方式下,线性模型和非线性特性系统之间的差异没有对测量结果的形成产生重大影响[2]。
计量仪器的合成和系统确定移动物体的参数,这些工具必须包括元素造型的基本坐标系统,当围绕其质量中心旋转时,能够确定移动物体的位置。有不同的方法和工具用于构建和保持垂直测量模式[3-5]。然而,陀螺系统是最常用的,由于其稳定性违背由物体的运动造成的惯性效应。另一方面,测量仪器建立在旋转曲线基础之上,二这些曲线有很多缺点,如设计比较复杂,极端条件下不可靠,特殊系统确保旋转的需求,体积大,高昂的价格,在很大程度上限制了它的应用。
因此,引入了一个适当的自适应算法,开发了动态误差最小准则[6-11],在测量系统中是一个很重要的确保精确度的应用。自动控制系统和测量系统在结构上的区别,因为后者有一个主变压器的输入,其输入信号是无法直接测量和修正的。测量系统作为一个整体,不提供输出反馈在测量电路中。因此,它不可能立即使用这种从自动测量系统自动控制方法的结果。然而,额外的测量通道基于基本通道的并行操作可以连接到计量电路。额外的通道可能具有特定结构用于减少校正设备的动态误差。自动控制理论方面的一些概念和技术可以有效地被使用。
按照上述方法的基本原则,开发了一个新的测量系统,它克服了现有测量仪器的缺点,在一个非常简化的机械模块,另一方面,在纳米技术领域的先进成果中,微处理器和计算机设备发展也十分迅速。
1 新算法系统模型
把建立测量系统的测量环境操作的特征量考虑在内,从其他测量渠道获取的最适当形式的处理数据方法是卡尔曼算法,这个算法的特点非常适合解决许多测量仪器精度优化上列出的所有移动物体的问题。在这种情况下,算法将在有关改善测量系统的动态精度设定目标的背景下开发出来的。这个过程是其他的通道的一部分,旨在消除多次干扰对测量结果的影响,然而,该算法也可以用于许多其他动态模式下的操作系统在计量和自动化领域。如果动态误差只是在上述测量基础上决定的,那么精度是不够的。移动物体的运动不仅表明了基本运动还展示了二次扰动过程中不可预知的行为。
把建造测量环境的数量特性考虑在内,可以确定的是,从额外的测量通道来获取最适当的处理数据形式是卡尔曼算法。该算法的特点非常适合解决在方案优化过程中发生的许多测量仪器精度不精确的问题。在这种情况下,算法在设定目标的背景下开发的,目的是改善提出的测量系统的动态精度。这个过程是额外的通道的一部分,旨在消除许多次干扰对测量结果的影响。然而,基于数学模型,该算法也可以用于许多其他系统在动态模式下操作,如计量和自动化。
如果只是基于测量基础上确定动态误差,那么精度是不够的。移动物体的运动表明了它不仅是基本的还是在敏感元素测量仪器的额外的通道二次扰动过程中不可预知的行为,使用主要的数学模型来确定动态误差需要考虑基本扰动过程的影响。
该模式对二次扰动过程不敏感。它们是由许多参数的随机性质决定的,并与运动物体的运动相结合。但是在某些情况下,在它们的影响下积累误差可以达到不可接受的高值。卡尔曼滤波分为两个部分:第一个循环可以被假定为一个基本的自预测估计和最优值的测量确定;第二个循环与第一个并行运行。它旨在确定元素的当前值的相关矩阵预测误差。
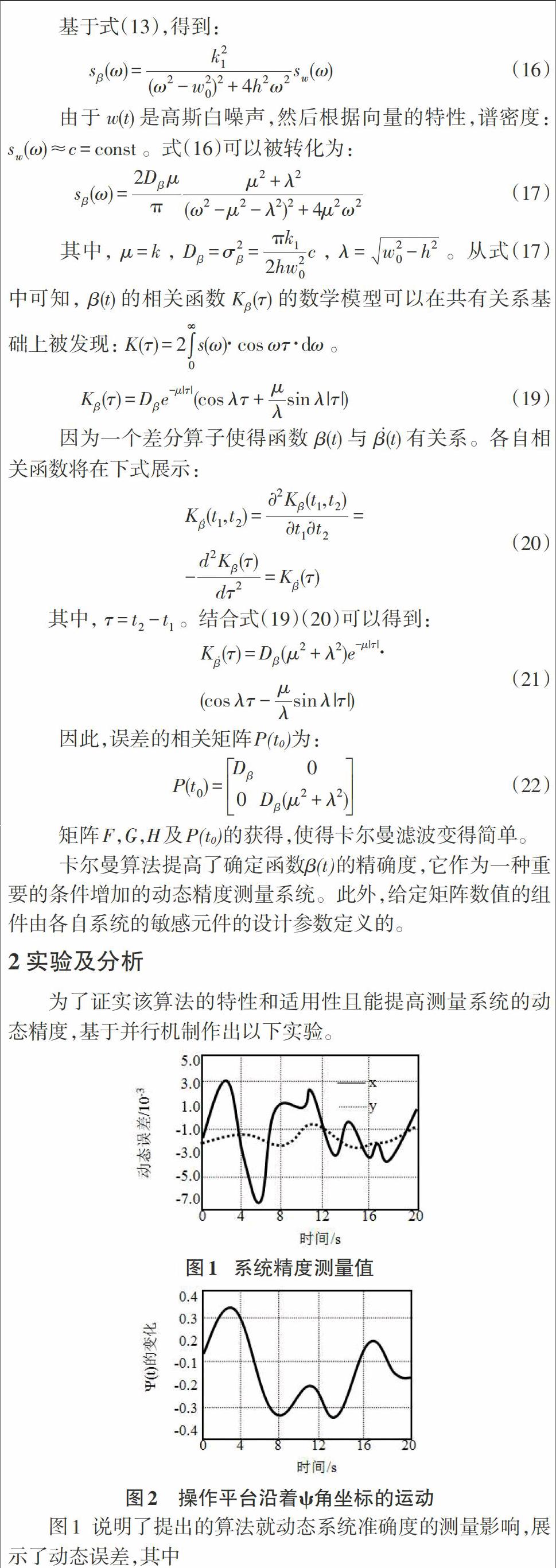
[ψmr(t)]和[ψkfmr(t)]是作为一种平台运动测量的结果函数,分别在五卡尔曼滤波器和有卡尔曼滤波器下进行。[ψ(t)]是定义操作平台运动的函数。x的动态误差最大值范围在[0.04°,0.05°],因此y的变化范围在[0.15°,0.25°]。使用卡尔曼滤波大大提高了测量系统的稳定性及其动态精度。实验表明,在模块处理信号前使用提出的算法,动态误差的最大值不超过0.1°。而同样的实验,不使用卡尔曼滤波算法,测量系统在同一测量条件下动态误差最大值在[0.2°,0.3°]内。
3 结束语
实验结果证实了该算法的有效性,对测量移动物体系统的动态精度气到了很好的作用。作为算法运行的结果,即使受到动态因素影响,动态系统的精度也有很大程度的提高,这可以不使用昂贵的设备和稳定系统而实现。该算法可以成功地用于改善无陀螺系统测量移动物体参数的动态精度。然而,由于数学模型大力发展,它可以被应用在许多其他测量仪器和系统自动化上,系统运行在动态模式下,例如物理摆。该算法基于卡尔曼滤波,它的目标是消除一些干扰源的影响,降低总干扰因素的影响。
参考文献:
[1] 慕春棣, 梅生伟, 申铁龙. 非线性系统鲁棒控制理论的一些新进展[J]. 控制理论与应用, 2001(1):1-6.
[2] 孟范伟, 何朕, 王毅, 等. 非线性系统的线性化[J]. 电机与控制学报, 2008(1):89-92,98.
[3] 郭永宾, 肖银, 於亚飞, 等. 非线性光机械系统中的双稳性与纠缠[J]. 光学学报, 2015(10):275-279.
[4] 王中豪, 周火明, 李维树, 等. 基于细菌觅食优化算法的岩体压缩流变参数反演[J]. 长江科学院院报, 2015(10):85-89+106.
[5] 黄威然, 楼佩煌, 钱晓明. 基于实时以太网的网络化数控系统高精度时钟同步和短周期通信[J]. 计算机集成制造系统, 2015(10):2668-2676.
[6] 殷守林, 刘天华, 李航. 基于模拟退火算法的卡尔曼滤波在室内定位中的应用研究[J]. 沈阳师范大学学报:自然科学版, 2015(1):86-90.
[7] 刘天华, 殷守林. 一种改进的遗传卡尔曼算法在室内定位中的研究[J]. 沈阳师范大学学报:自然科学版, 2015(2):265-269.
[8] 张卫荣, 李航, 殷守林. 基于区间估计的最小二乘法在卡尔曼滤波中的应用研究[J]. 沈阳师范大学学报:自然科学版, 2015(2): 284-287.
[9] Shoulin YIN, Jie Liu, Lin Teng. A Novel Initial Value Selection for Discrete Kalman Filter used in Indoor Localization Processing[J]. Journal of Computational Information Systems, 2015 ,11(19): 7063-7070.
[10] Jie Liu, Shoulin YIN, Lin Teng. A New Unscented Kalman Filter Based on Bayesian Estimation[J]. Journal of Computational Information Systems, 2015, 11 (19): 7047 -7054.
[11] Tianhua Liu, Shoulin Yin. An improved k-means clustering algorithm for Kalman filter[J].ICIC Express Letters Part B: Applications, 2015, 6(10): 2687-2692.
猜你喜欢
电子制作(2019年23期)2019-02-23
测控技术(2018年12期)2018-11-25
电测与仪表(2017年20期)2017-12-19
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年4期)2016-11-07
电源技术(2016年9期)2016-02-27
江苏科技大学学报(自然科学版)(2015年4期)2015-12-17
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09
