
白萝卜收获机挖掘铲参数的设计
2016-03-23 06:10周国龙张晋国王洪伟顾旭彪刘利坤
农机化研究 2016年9期
关键词:萝卜
周国龙,张晋国,王洪伟,顾旭彪,杨 进,刘利坤
(河北农业大学 机电工程学院,河北 保定 071001)
白萝卜收获机挖掘铲参数的设计
周国龙,张晋国,王洪伟,顾旭彪,杨进,刘利坤
(河北农业大学 机电工程学院,河北 保定071001)
摘要:针对我国白萝卜人工收获效率低、成本高等问题,设计出专用的白萝卜挖掘铲。工作时,第1步通过挖掘铲破坏白萝卜与土壤的接触力,使白萝卜与土壤分离,第2步由人工捡拾装袋进而完成白萝卜收获的全过程。通过建立挖掘铲的几何模型确定了入土角α、铲面长度L、铲面宽度A和后端面高度h。 该挖掘装置采用后悬挂牵引的方式挖掘白萝卜,使白萝卜的收获效率大大提高,装置结构简易、成本低,具有极其广阔的市场应用场景。
关键词:收获装置;挖掘铲;萝卜
0引言
萝卜已经是我国主要蔬菜品种之一,种植范围覆盖全国各地。尤其是在张家口坝上地区,因自然条件优越,生产的萝卜色泽鲜亮、水分足、口感好,不易糠心、营养丰富、商品性好,因此成为出口市场的抢手货。近几年,萝卜出口量呈现稳定的递增趋势,种植出口萝卜经济效益很好;但目前的白萝卜收获机械结构笨重、构件布局不合理,工作时易伤根、伤皮,且与我国现有的农艺要求不匹配。以张北坝上地区为例,当地农户在萝卜收获期完全采用人工收获,要完成萝卜松土、拔起、捡拾、装袋、装车等5大环节,并且每一环节劳动强度都很大,因此当地农户迫切需要1台白萝卜收获机。
成熟的萝卜长达25~40cm,重达0.5~1kg,给收获造成了一定难度。 目前,萝卜收获还未实现机械化,全靠人工拔取。劳动强度大,费时费力。青壮年劳动力,每天收获约2 500kg。萝卜最佳收获期仅3~5天。国外早于我国对块根类收获机进行研制:美国19世纪30年代起步研究块根拔取式样机;日本20世纪90年代开始研制块根类机械,如ISEKI、YANMAR等农业机械公司研制出自走式萝卜收获机,这些萝卜收获机能够完成单行或多行的收获[1]。虽然以上收获机能够满足国外的农艺要求,但与国内的农艺要求不相符。国外种植面积较大,行距较宽;而国内相对都是小片区域,行距也偏小,因此这些白萝卜收获机不适合国内农艺要求。
目前,白萝卜收获依靠人工收获存在多种缺点:效率低、成本高、破损率高、收净率低、劳动强度大且费时费力,这些收获缺点给人工收获带来巨大问题。张北坝上地区农户每到收获期本该兴高采烈,但因为人工收获难成为了他们在收获时头疼的问题。因此,研究设计一种适合我国农艺要求,可以减少劳动力、提高收获效率、节约成本,具有重要意义。
1萝卜收获机发展现状
1.1 国外萝卜收获机的研究现状
1937年,拔取式收获机试验样机在美国首次问世,其由美国斯阔特·瓦伊涅耳公司研制,该公司同时研制出块根类联合收获机[2-3]。
1959-1966年,近7年的时间,全苏农机制造科研所和农机制造企业投入巨大人力、财力、物力,在块根类作物的收获机的研制并且取得了巨大的研究成果和广阔的市场,YKUI-1型单行拔取式块根收获机研制成功[2-3]。
Weremczuk公司生产的拔取式胡萝卜收获机,如图1所示。

图1 单行胡萝卜收获机
胡萝卜收获铲后悬挂于拖拉机上,由3组传送带将胡萝卜运送到与作业拖拉机配套使用的储料箱内。ASA-FILT公司研究的单行拔取式胡萝卜收获机主要机型有CM-1000、CM-1000E(见图2)等胡萝卜联合收获机,并打开了广阔的国际市场。

图2 CM-1000胡萝卜收获机
1.2 国内萝卜收获机的研究现状
我国在胡萝卜收获机械方面的研究起步较晚。近几年,胡萝卜在机械化收获方面只是借助现有农机具在胡萝卜侧面进行松土,然后人工拔取,最后进行切樱处理装袋。该收获方式存在工序多、能耗高、劳动量大及经济成本高等问题,不能满足我国现有胡萝卜规模化种植的要求。
我国白萝卜的收获主要以人工收获为主,尽管有些地区已采用机械化,但全是半机械化,主要是借用现有的松土铲对白萝卜周围的土壤松动,再由人工拔取;但因现有松土铲存在诸多问题,无法满足当今的白萝卜规模化生产的农艺要求。
白萝卜机械化收获仍处于初始化阶段。虽然白萝卜收获机械在不断快速发展,但由于研究设计起步晚、技术水平不高,还处于中小型悬挂式集条铺放收获机的研制推广阶段,所研制收获机具无论在技术方面还是可靠性方面还不理想。
2萝卜收获铲原理分析
2.1 设计原理
萝卜地下生长部分长度不一,约从18~35cm分布,如图3所示。其种植模式为垄作点播,垄距 60cm,垄高12 cm,垄顶宽度 20cm,垄台坡度 < 67°,株距20~25cm,如图4所示。松土过程中不能损伤萝卜,且要求松土充分,使萝卜拔取时所受阻力最小,避免折断。
2.2 松土铲铲头类型
目前的松土铲铲头类型多种多样,各有利弊,适用情况各异,但没有完全适合给白萝卜松土的铲头。我国目前没有给出白萝卜松土的铲头标准,主要是借鉴现有的深松机的深松铲和块根类作物的铲头类型[4]。例如,马铃薯收获机的松土铲是由三角形平面组成,通过松土铲松土将挖绝物与土壤分离,再由传送带传送到空地上[5-6]。由于白萝卜收获机只需要在白萝卜的两侧松土,和马铃薯收获机有明显不同,并没有使用松土铲将马铃薯从土壤中完全铲出,所以不能直接应用马铃薯的铲头,只能改进为适应白萝卜松土铲的铲头。另外,深松机的铲头类型各异,作用不同,主要有双翼型、箭型、凿型3种,如图5~图7所示。

图3 张北萝卜

图4 萝卜垄
图5 双翼形深松铲 图6 箭形深松铲

图7 凿形深松铲
2.3 工作原理
该机与拖拉机配套使用,采用三点悬挂连接于机架之上,由拖拉机后输出轴提供动力,能够带动挖掘铲沿拖拉机牵引方向前进,并能提升和降低挖掘铲,从而改变入土深度。该机结构简易,由限深轮、挖掘铲和铲座等部分组成。工作时,挖掘铲随着拖拉机牵引逐渐入土,最终达到入土深度要求,此时拖拉机沿直线行进且保持挖掘铲的深度不变。白萝卜挖掘铲装配,如图8所示。

1.悬挂头架 2.铲座 3.挖掘铲 4.横梁
3主要工作部件及工作参数
3.1 机架的设计
机架采用普通结构钢材料,由60mm方形钢管焊接而成,且结果简易,整体来看是一个矩形梁,如图9所示。其由横梁、纵梁以及悬挂机构等部分组成,机架与拖拉机后输出轴直接相连接,通过万向节改变方向和转速;驱动挖掘铲逐渐入土,最终达到需要的深度开始作业。
3.2 挖掘铲设计
挖掘铲由铲柄、铲板和铲尖3部分构成,铲尖和铲板焊接在铲柄的侧面上,如图10所示。

1.悬挂头架 2.横梁 3.纵梁 4.铲座
图10 白萝卜挖掘铲
3.3 白萝卜挖掘铲结构参数的确定
如图11所示:五边形平面铲的主要参数有:入土角α、铲面长度L、铲刃斜角β、铲面宽度A和铲后端高度h等。

图11 挖掘铲的结构参数
3.3.1 入土角α
入土角即是挖掘铲铲面与水平面之间的夹角,对挖掘铲能否以最佳形式入土有着至关重要的作用。其不但对入土性能有影响,而且对挖掘阻力也有影响。使铲面顺利后移的条件是P≥G·tan(α+φ)[7-13]。其中,P是挖掘阻力(使土壤沿铲面掘起所需要的力),G是挖掘铲铲面上所覆盖土壤的重力。该公式显示出挖掘阻力与入土角α和摩擦角φ成正相关的函数关系。增大入土角,挖掘阻力会随即增大,减少入土角,挖掘阻力就会随即减小。因此,入土角应适宜,入土角不应太大也不应太小:太大挖掘阻力也太大,耗费拖拉机功率;太小不易入土,造成挖掘深度变浅,达不到深度要求。另外,考虑到不同的土壤的性质对入土角也有一定影响,理论和实践共同表明入土角通常设定为20°~30°[7-13]。
入土角是挖掘铲的重要参数,是挖掘铲是否能够正常入土确保萝卜完好的关键因素。位于铲面上的土壤受力情况如图12所示。
图12 铲面受力分析
利用达朗伯原理,为使土壤能够后移,应满足
Pcosα-f-Gsinα≥0
K-Gcosα-psinα=0
f=Kμ
式中P—挖掘阻力;
K—白萝卜挖掘铲对土壤的反作用力;
f— 铲面与土壤的摩擦力;
G—掘起物的重力;
α—白萝卜挖掘铲的入土角;
μ—土壤对铲的摩擦因数,μ=tgφ,φ为掘起物与铲面之间的摩擦角。
3.3.2铲面长度L
铲面长度对萝卜的松土效果有着重要作用,是指从挖掘铲铲尖顶端a点到b点的直线长度,有
4铲尖受力分析
本课题设计的铲尖形状是一个五边形,两个对称的且平行的短边中一边与铲柄连接。为了计算抬土高度,选取从铲尖顶端O到末端B且与铲尖末端垂直的一条直线OB作为三角形OBD的一条斜边,和已知的23°(铲面与水平面的夹角),由图13计算出抬土高度H。已知OC=115mm、AC=100mm由三角形勾股定理得


=165.8mm
根据实际要求萝卜挖掘铲在萝卜根以下深度不小于50mm,才能保证萝卜较完整的与土壤分离,而最终计算得出抬土高度为64.7mm,明显看出64.7mm>50mm,因此该萝卜挖掘铲可以较好入土,并能将萝卜与土壤分离,分离后保证了萝卜的完好。

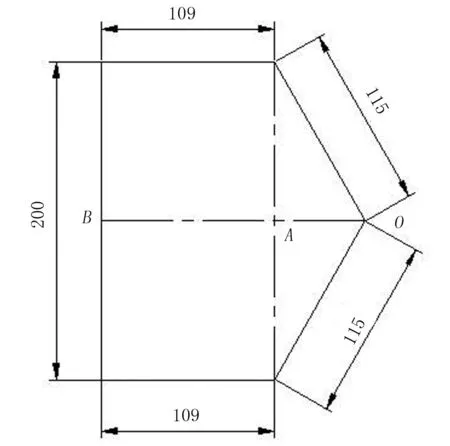
图13 三角形OBD和铲尖平面图
5结论
1)通过建立挖掘铲的几何和受力分析模型确定了挖掘铲的入土角23°,铲面长度165.8mm,铲面宽度109mm,计算出了后端面高度64.7mm。
2)根据3种铲尖的对比分析确定本萝卜收获机的铲尖形状和尺寸。
参考文献:
[1]付威,陈海涛,王业成.萝卜收获机的设计及关键部件仿真优化[J].农机化研究,2008(11):101-103
[2]卡那沃依斯基.收获机械[M].北京:中国农业机械出版社,1983.
[3]桑正中.农业机械学(上册)[M].北京:机械工业出版社,1988.
[4]李范哲,朴今淑.评价土壤工作部件工作阻力的数学模型[J].延边农学院学报,1996,18(3):159-163.
[5]吕金庆,陈春富,李世柱.马铃薯松土机松土铲的设计[J].农机化研究,2004(5):105-106.
[6]罗彤娥,吴建民,孙伟,等.2种马铃薯松土铲的对比分析[J].甘肃农业大学学报,2011,46 (3): 121-125.
[7]陈书法,李耀明,孙星钊.花生联合收获机挖掘装置的设计研究[J].中国农机化,2005(1):47-49.
[8]杨然兵,李国莹,尚书旗,等.机械化挖掘收获部件发展现状与展望[J].农机化研究,2008(9):5-8.
[9]尚书旗,李国莹,杨然兵,等.4HQL-2 型全喂入花生联合收获机的研制[J].农业工程学报,2009,25(6):125-130.
[10]贾晶霞,张东兴,桑永英.马铃薯挖掘铲计算机辅助分析与模拟试验研究[J].农业工程学报,2006,22(8):106-110.
[11]胡志超,彭宝良,尹文庆,等.4HL2 型半喂入自走式花生联合收获机的研制[J].农业工程学报,2008,24(3):148-153.
[12]Wang Jiasheng, Yang Ranbing, Shang Shuqi.Analysis of influencing factors on operating resistance of machine-soilsystem[J].AdvancedMaterialsResearch, 2012,422(1): 596-600.
[13]陈书法,李耀明,孙星钊.花生挖掘铲动力学分析与试验[J].农业机械学报,2005,36(11):59-63.
Radish Harvester Design and Finite Element Analysis of Digging Shovel
Zhou Guolong, Zhang Jinguo, Wang Hongwei, Gu Xubiao, Yang Jin, Liu Likun
(College of Mechanical and Electrical Engineering, Agricultural University of Hebei,Baoding 071001,China)
Abstract:In this paper,radish China reaped by low efficiency and high cost problem, design a special green radish digging shovel.First step by digging shovel destroy the radish and the contact force of the soil, radish, separating from the soil, the second step by artificial collecting bag and then finish the whole course of radish harvest.By establishing a geometric model of the digging shovel capacity determines the angle of alpha,the shovel length L and width of the shovel a and the back face height h.Suspension traction after the mining device adopts the way of mining radish, make green radish harvest efficiency is greatly raised, device has the advantages of simple structure, low cost, has the extremely broad market application scenario.
Key words:harvesting device;digging shovel;radish
中图分类号:S225.7
文献标识码:A
文章编号:1003-188X(2016)09-0094-05
作者简介:周国龙 (1989-),男,石家庄人,硕士研究生,(E-mail)2267375333@qq.com。通讯作者:张晋国(1957-),男,石家庄人,教授,博士生导师,(E-mail) zhangjinguo@hebau.edu.cn。
基金项目:公益性行业( 农业) 科研专项(201103003)
收稿日期:2015-09-06
猜你喜欢
中老年保健(2021年8期)2021-08-24
小学生必读(低年级版)(2019年4期)2019-07-10
小天使·一年级语数英综合(2019年3期)2019-04-19
学生天地·小学低年级版(2018年9期)2018-12-03
学生天地(2018年27期)2018-10-12
湖南农业(2017年1期)2017-03-20
小猕猴学习画刊(2015年11期)2015-11-26
英语大王·奇妙成语(2013年7期)2013-08-22
早期教育(美术教育)(2010年12期)2010-12-24
幼儿时代·故事妈妈(2004年11期)2004-04-14
