
基于高速摄像系统和图像边缘检测的精密排种器设计
2016-03-23 06:10张学明刘志刚
农机化研究 2016年9期
关键词:边缘检测
周 茉,张学明,刘志刚
(1.湖北工业大学工程技术学院 电气信息系,武汉 430068;2.济源职业技术学院,河南 济源 459000;3.南昌工学院,南昌 330108)
基于高速摄像系统和图像边缘检测的精密排种器设计
周茉1,张学明2,刘志刚3
(1.湖北工业大学工程技术学院 电气信息系,武汉430068;2.济源职业技术学院,河南 济源459000;3.南昌工学院,南昌330108)
摘要:为了综合优化排种器的单粒率、双粒率、空穴率、平均间距、重播和漏播指数,设计了一种基于高速摄像和图像边缘检测的排种器,提高了播种机的播种精度。利用高速摄像系统和图像边缘检测技术获取种子堆积的图像反馈信息,采用PID自动化调节的方式,用链条对排种轮的驱动轴进行了有效的调节,从而达到了精密播种的目的。为了测试设计的排种器的有效性和可靠性,对其综合指标进行了测试。通过测试发现:使用高速摄像边缘提取系统的排种器比人工检测播种方法的单粒率、双粒率、空穴率的相对误差要低,平均间距控制平稳,并且有效地降低了重播指数和漏播指数。
关键词:高速摄像;边缘检测;排种器;PID条件;排种轮
0引言
随着计算机和机械自动化技术的发展,机器视觉开始被广泛的应用在农业科学技术的研究中,国内外专家和学者对计算机检测技术展开了广泛的研究。Karayel研究了一种控制排种器速度的方法,有效地提高了排种器播种的均匀性和播种速度;Panning 考虑种子的不规则形状,设计了一种高精度的种子排种器;Yazgi通过高速摄像对种子的运动轨迹和均匀性进行了一系列的研究,为排种器参数的优化提供了有效的参考数据。在国内,胡少兴等采用由CCD 摄像机和平面镜组成的检测系统,进行排种器性能检测;蔡晓华等设计了一款利用计算机视觉系统对排种器的粒距进行检测的自动化装置;郭俊旺等对排种器的自动化检测性能进行了研究,使用机器视觉技术提高了检测过程的自动化。本文主要运用高速摄像系统和图像处理技术对排种器性能进行检测试验研究,以期提高排种器的综合性能指标。
1精密排种器总体设计
近年来,精密播种已经成为现代化农业技术发展的重要方向之一,精密排种器则是实现精密播种的核心部件。排种精度及均匀性是衡量排种器工作性能的重要指标,提高排种精度及均匀性,可抑制杂草、减少种内竞争、增加产量。
图1为精密播种机的总体设计框图。为了提高播种机的播种精度,采用高速摄像技术对种子堆积的图像进行实时采集,并利用图像边缘进行检测,将图像信号转换成PID调速控制反馈信号,从而有效地获取排种器的播种信息,通过PID实时调节,实现排种器排种轮转速的优化调节。

图1 精密排种机总体设计
图2为精密排种器的调试结构设计。其控制中心是伺服电机控制器,利用PID种子反馈信号,对PID转速进行编码控制,最后通过电信号调节伺服电机控制器,使其输出优化后的转速,将转速传送到调节结构;通过调速机构驱动排钟轴,完成排种过程。
2精密排种器结构和高速摄像系统设计
2.1 排种器结构设计
随着科学技术的发展,机器视觉检测技术在工业检测、谷物外观检测及水果品质检测等领域发展迅速,并且在播种技术中也开始应用,可以有效地提高排种器工作性能。
排种器主要由外壳、护种板和排种轮组成,如图3所示。对排种器工作过程进行分析时,需要建立排种器的分析模型。对于排种器这种复杂结构边界的建模,采用基于 Pro/Engineer 模型来建立边界的三维离散元分析模型,并最终设计了排种器的原型。
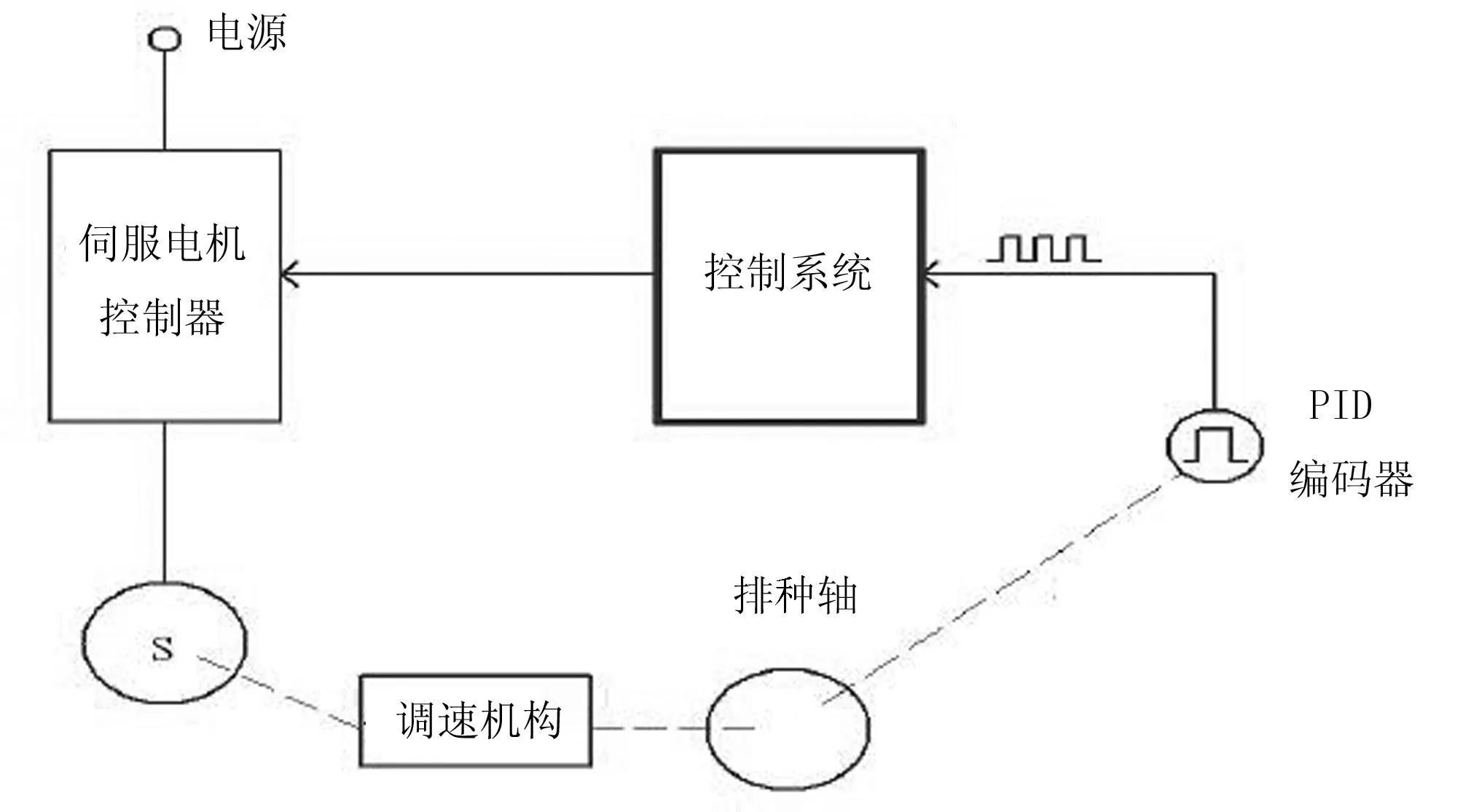
图2 精密排种器调速机构设计

1.外壳 2.护种板 3.排种轮
图4为排种器的原型设计示意图。其中,排种轮由链条控制,利用高速摄像得到的种子边缘提取信息,利用PID反馈调节机制对排种轮转速进行控制,以期达到精密控制的目的。
2.2 边缘提取技术和PID调节
种子图像的边缘提取分为二维种子方向信息和三维空间信息的特征提取。其中,二维种子方向信息的提取采用Hough变换,其基本思想是利用了点与直线的对偶性的特性。在图像空间中,假设所有过边缘线的点都满足
y=kx+b
(1)
其中,k表示直线的斜率,b为截距。其极坐标的表示形式为
ρ=xcosθ+ysinθ
(2)

(3)
其中,点(a,b)为圆心坐标,r为圆半径,点(x,y)为圆周上的一点,将其转换为参数坐标系(a,b,r),表达为
(4)

(5)
其中,Gx和Gy表示边缘提取前和提取后的图像,梯度是一个向量。其幅度和相位分别为
(6)

(7)
式中的偏导数需要对每一个像素位置进行计算,对于图像的三维边缘信息提取需要借助于小波算法,在空间不同尺度上进行综合得到最终边缘图像。采用的具体步骤如下:
1)首先对图像G(x,y)进行小波变换,生成模图像簇Ms(x,y)和相角图像族As(x,y);
2)令j=maxscale,Maxscale表示小波算法的最大特征尺寸;
3)在模图像在Ms(x,y)中寻找沿相角方向的模局部极大值点,从而可以生成边缘图像Bs(x,y),s=1,2,3…,图像中的其他元素标记为0;
4)在Bs(x,y)中删除长度数和平均幅值小于已设定的链长度阈值Tn和链平均幅度阈值Tm的那些边缘链,得到最大特征尺寸下的图像边缘Ej(x,y);
5)在图像Ej(x,y)中,通过自适应的选取链平均幅度阈值L来对图像进行进一步删除,得到更加精确的图像Fj(x,y);
6)对于Fj(x,y)中的每一条链的两端点,在(j-1)尺度下搜索对应位置处的3×3邻域,生成边缘图像Ej-1(x,y)边缘图像;
7)j=j-1。如果j>1,则重新进行步骤5),否则继续下一步;
8)当j=1时,边缘图像Fj(x,y)即为综合后形成的边缘图像。通过以上步骤可以完成图像的二维和三维提取,其总体流程如图5所示。

图4 排种器原型设计示意图

图5 特征提取过程
图5中,首先使用高速CCD摄像机对图像进行采集,并利用图像预处理技术对图像进行处理,最后利用PID控制器可以调节排种轮的控制参数,实现排种器转速优化反馈调节。同时,使用遗传算法提高PID参数调节的自适应能力,具体过程如图6所示。
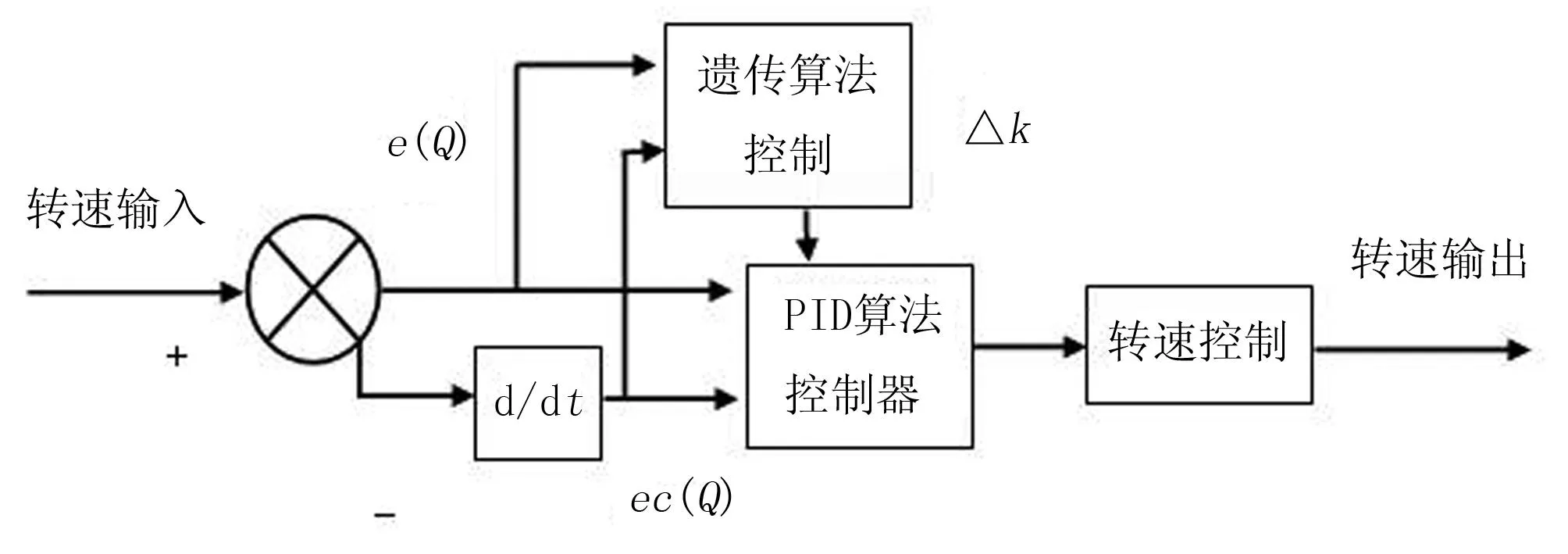
图6 排种轮调节过程示意图
控制结构的总体分为4部分,主要包括转速输入部分、调节转速输出部分、遗传算法控制器和PID控制,通过遗传算法可提高系统PID参数的自适应调节能力。
3精密排种器性能测试
为了验证本文设计的基于高速摄像系统的精密排种器的性能,对排种器的排种参数进行了测试。测试项目主要包括单粒率、双粒率、空穴率、平均间距、重播指数和漏播指数。首先对高速摄像得到的种子图像进行边缘提取,提取的二维结果如图7所示。

图7 二维图像提取结果图
由图7可以看出:通过二维图像的特征提取可以明显的提取出玉米种子地轮廓,并且种子的方向清晰,可为排种器提供有效的信息。
图8表示图像边缘提取的三维结果图。由图8可以看出:利用图像边缘提取技术可以有效地提取出种子的三维轮廓,从而得到种子在排种器的堆积情况,最终图像可以转换为电信号,为排种器的PID调节提供反馈依据。
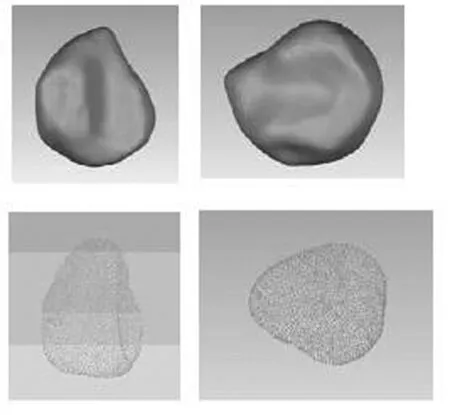
图8 三维图像边缘提取结果
表1为播种质量的测试结果。由表1可以看出:随着排种器排种轮转速的变化,其播种质量发生了较大的改变,其单粒率、双粒率和空穴率都在38.25 r/min时,效果最好。

表1 播种质量测试
为了验证测试得到的有效性和可靠性,对测试得到的种子合速度和理论计算值进行对比,通过对比发现:理论计算值和测试值吻合较好,从而验证了测试的准确性和可靠性,如图9所示。

图9 不同转速下种子和速度曲线
表2为对本文设计的排种器的播种均匀性指标进行测试得到的测试结果。由表2可以看出:相比人工检测方法,高速摄像检测方法可以有效的降低株距的相对误差,降低变异系数,提高播种距离的控制精度和稳定性。

表2 播种均匀性指标测试
表3为对设计的排种器的播种性能指标进行测试得到的测试结果。由表3可以看出:相比人工检测方法,高速摄像检测方法可以有效地降低重播率和漏播率,提高播种的合格率。

表3 播种性能指标测试
4结论
采用高速摄像和边缘检测技术设计了一款新的精密播种器,对其单粒率、双粒率、空穴率、平均间距、重播和漏播指数进行了测试;对种子堆积图像的边缘进行了提取,并对播种效果进行了分析。
通过测试发现:排种器可以有效地获取种子的二维方向特征和三维空间特征,使用高速摄像边缘提取系统的排种器比人工检测播种方法的综合性能都要好。结果表明:其单粒率、双粒率和空穴率最低仅为0.22%、0.12%和0.18%,株距控制精度较高,并且平稳性指数好,漏播率和重播率低,合格率高,满足精密播种机的设计要求。
参考文献:
[1]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
[2]钟陆明,陈学庚,温浩军,等.免耕播种机气吸式排种器影响因素的试验研究[J].农机化研究,2012,34(5): 160-164.
[3]翟力欣,姬长英,丁启朔.Irshad Ali 水田土壤蠕变的粘弹性计算[J].浙江农业学报,2010(4):509-514.
[4]翟力欣,姬长英,丁启朔.流变态土壤切削试验用室内土槽与测试系统设计[J].农业机械学报,2010,41 (7):45-49 .
[5]夏俊芳.基于 ADAMS 的精密播种机补种机构虚拟设计与分析[J].华中农业大学学报,2007,26(3) : 419-422.
[6]刘飞,赵满全.膜下播种机的设计及排种装置的室内性能试验[J].农业工程学报,2010, 26 (4):139-142.
[7]白晓虎,张祖立.基于的播种机仿形机构运动仿真[J]. 农机化研究,2009,31(3):40-42.
[8]包文育,林静,霍春明,等.2BG-2 型免耕播种机横向运动稳定性分析[J].沈阳农业大学学报,2009, 40(3):370-372.
[9]王熙,张海玉,赵军,等.大豆播种机电液仿形机构研究[J].农机化研究,2010,32(1)227-229.
[10]许剑平, 谢宇峰,陈宝昌.国外气力式精密播种机技术现状及发展趋势[J].农机化研究,2008(12):13-14.
[11]胡建平,毛罕平,陆黎.磁吸式穴盘精密播种器排种机构的设计[J].农机化研究,2005(2):133-138.
[12]孙裕晶,马成林,牛序堂,等.基于离散元的大豆精密排种过程分析与动态模拟[J].农业机械学报,2006, 37(11): 45-48.
[13]陈立东,何堤.论精密排种器的现状及发展方向[J].农机化研究,2006(4):16-18.
[14]杨玉芬,张永丽,张本华,等.典型玉米种子的静压破损试验研究[J].农机化研究,2008(7):149-151.
[15]颜辉,于建群,付宏,等.离散元法软件与CAD 软件集成开发研究[J].现代情报,2007(9): 209-211.
[16]焦红光,李靖如,赵继芬,等.关于离散元法计算参数的探讨[J].河南理工大学学报,2007, 26(1): 88-93.
[17]谢志勇,张铁中,赵金英.基于Hough变换的成熟草莓识别技术[J].农业机械学报,2007,38(3):106-109.
[18]曹文,丁俊华,李再臣.机械式精密排种器的研究与设计[J].农机化研究,2009,31(7):143-146.
[19]刘佳,崔涛,张东兴,等.玉米种子分级处理对气力式精量排种器播种效果的影响[J].农业工程学报, 2010,26(9):109-113.
[20]张铁中,杨丽,陈兵旗,等.农业机器人技术研究进展[J].中国科学:信息科技,2010,40(增刊 1):71-87.
[21]毕坤,赵馨,侯睿锋,等.机器人技术在农业中的应用方向和发展趋势[J].中国农学通报,2011,27:469 -473.
[22]宏福.图像边缘分割算法的优化研究与仿真[J].计算机仿真,2011(8):280-283.
[23]袁春兰,熊宗龙.基于Sobel算子的图像边缘检测研究[J].河海科技大学学报,2009,30(6):31-48.
[24]魏伟波,芮筱亭.图像边缘检测方法研究[J].计算机工程与应用,2006(30):88-91.
[25]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005(3):415-419.
Design for Precision Metering Device Based on High-speed Camera and Image Edge Detection
Zhou Mo1, Zhang Xueming2, Liu Zhigang3
(1.Engineering and Technology College,Hubei University of Technology,Wuhan 430068,China; 2.Jiyuan Vocational and Technical College, Jiyuan 459000,China; 3.Nanchang Institute of Science & Technology,Nanchang 330108,China)
Abstract:In order to achieve accurate positioning robot corn stalk line, the structure of farming corn robot is improved, and it put forward a kind of RSSI localization method based on Taylor series expansion, and increase the corn stalk line robot positioning accuracy.Together with the method of PID closed-loop feedback control, by using high resolution camera gathering image, the positioning system use the PC master side image processing the displacement of the robot , realized the real-time positioning function. In order to verify the reliability of the robot corn stalk line, and adopt the method of field experiments on the performance of the robot were tested. Through test,it was found that the proposed RSSI positioning method of positioning accuracy is higher, and the image processing system can accurate calibration of corn stalk line, which can accomplish the precise positioning of the robot in the corn field and avoid the robot in the process of operation causing damage to the crops.
Key words:corn stalk; real-time positioning; machine vision; the closed loop system; feedback adjustment
中图分类号:S223.2;S220.3
文献标识码:A
文章编号:1003-188X(2016)09-0108-05
作者简介:周茉(1981-) ,女,湖北鄂州人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:湖北省自然科学基金面上项目(2014CFB589);中央高校基本科研业务费专项(2014QC004);太阳能高效利用湖北省协同创新中心开放基金项目 (HBSKFMS2014032)
收稿日期:2015-06-04
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26
