
高速水稻插秧机新型分插机构的设计
2016-03-23 06:10郭晨海陈丽果曹晓辉
农机化研究 2016年9期
郭晨海,陈丽果,葛 晶,曹晓辉,沈 燕
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.常州江苏大学工程技术研究院,江苏 常州 213164)
高速水稻插秧机新型分插机构的设计
郭晨海1,陈丽果1,葛晶2,曹晓辉1,沈燕2
(1.江苏大学 汽车与交通工程学院,江苏 镇江212013;2.常州江苏大学工程技术研究院,江苏 常州213164)
摘要:针对高速水稻插秧机在取秧工作时容易造成伤秧的现象,提出了采用新型双偏心卵形齿轮行星系分插机构的设计方案;建立了该机构的虚拟样机模型并进行仿真分析,分析结果表明:与传统设计方案相比,新的设计方案秧针运动轨迹与秧门的位置关系得到优化;取秧时,秧针运动轨迹与秧盘几乎垂直,保证了秧苗的质量;当秧箱导轨夹角变为80°、推秧角为78°、推秧角与秧苗和秧针夹角的和接近90°时,优化了插植后秧苗直立性,满足了农艺要求。
关键词:高速水稻插秧机;直立性;双偏心卵形齿轮;秧箱导轨夹角
0引言
水稻是我国主要的粮食作物。近几年,随着农业机械化水平的不断提高,插秧机的使用也越来越普遍,从最初的手扶式插秧机变为乘坐式插秧机[1],发展为现在的高速水稻插秧机。高速水稻插秧机具有惯性力小、噪声小、作业效率高等特点,提升了水稻产业高效种植的要求[2]。
高速水稻插秧机分插机构工作时,既要实现机构的高速运动,又要满足农艺上的要求,故对其机构的设计要求比较高。高速水稻插秧机速度高的特性决定了其在单位时间内插秧次数提高,同时振动也加剧[3],故传统的高速水稻插秧机取秧时容易存在秧苗折断或损伤其他秧苗的问题。基于这一问题,笔者提出了新的高速水稻插秧机分插机构的设计方案。新型齿轮行星系中的齿轮具有4个变量,分别为长轴半径、偏心率、焦点在x轴的偏心距及焦点在y轴的偏心距。这4个变量一方面可以使得齿轮系更容易拥有合理的传动比;另一方面可以优化秧针尖点的运动轨迹,得出合理的“海豚曲线”,仿真出更加符合农艺要求的秧针尖点运动轨迹。新型双偏心卵形齿轮行星系分插机构不仅可以使机构运转平稳,大大提高插秧机的插秧质量,还能够实现机构的高速运转,满足农艺要求。
1传统插秧机设计要求
对于传统水稻插秧机分插机构的设计,秧针“海豚曲线”优化目标[4]:
1)为保持插秧后秧苗的直立性,秧针取秧时与水平线的夹角(取秧角)应在10°~25°之间,而推秧角与水平线的夹角(推秧角)应在65°~80°之间;
2)为了减少伤根,理想的取秧块应该近似为矩形,秧针轨迹要与秧箱的方向垂直或近似垂直;
3)插植臂的轴心(即行星轮轴心)轨迹不能与已插秧的中部接触,以免碰伤已插秧秧苗;
4)插秧穴口要尽量小(不大于30mm),太大会导致秧苗倒伏或者漂秧;
5)栽植臂在取秧时秧针的支撑部位不能碰撞秧门;
6)推秧角与取秧角的角度差为秧箱的倾角;
7)秧针达到最低点之前完成推秧动作。
为保持插秧后秧苗的直立性,水稻插秧机工作过程中取秧和插秧时其角度关系如图1和图2所示。
传统水稻插秧机秧箱导轨夹角等于90°,故有下列关系:取秧角+秧针与秧苗的夹角+秧箱倾角+秧箱导轨夹角=180°;推秧角+秧针与秧苗夹角=90°。
根据上面两个关系式得出:取秧角+秧箱倾角=推秧角,即推秧角-取秧角=秧箱倾角。
某传统水稻插秧机优化结果中[5],取秧角为12.96°,推秧角为67.96°,秧箱倾角为55°。从该实例看出:推秧角-取秧角=秧箱倾角,保证了秧苗插植后的直立性。其优化轨迹如图3所示,由此可以看出秧针“海豚曲线”轨迹与秧箱并不垂直。那么在取秧时,秧针会斜着向秧苗切去,秧苗受到折断损伤甚至还会伤及其他秧苗,故秧苗栽植质量也就会大大下降。
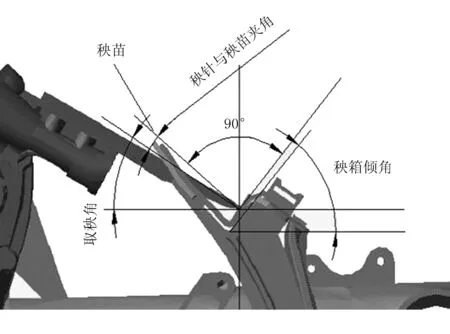
图1 取秧角和秧针与秧苗夹角关系

图2 推秧角和秧针与秧苗夹角关系

图3 某传统水稻插秧机优化轨迹
2分插机构仿真分析
高速水稻插秧机的分插机构,由分插器和驱动机构组成,驱动机构一般为椭圆齿轮轮系或是偏心椭圆齿轮轮系[6-9]。为了优化系统设计更加符合农艺上插秧要求[10-15],本文首次提出了一种双偏心卵形齿轮行星轮系分插机构。与椭圆齿轮轮系或偏心椭圆齿轮轮系相比,双偏心卵形齿轮轮系设计变量较多,具有4个变量,分别为长轴半径、偏心率、焦点在x轴的偏心距及焦点在y轴的偏心距。这4个变量一方面可以使得齿轮系更容易拥有合理的传动比;另一方面可以优化秧针尖点的运动轨迹,得出合理的“海豚曲线”,仿真出更加符合农艺要求的秧针尖点运动轨迹。
双偏心卵形齿轮最大缺点是设计困难,节曲线没有具体的函数表达式,齿廓线也极为复杂。为此,从数学角度出发,利用积分和求导,精确地计算出双偏心卵形齿轮的结构参数,并且建模,通过调整结构参数和定位关系不断对分插机构进行改进,使秧针的运动轨迹满足插秧机的工作要求。
2.1 双偏心卵形齿轮行星系组成及工作原理
双偏心卵形齿轮行星系分插机构(见图4),共有5个双偏心卵形齿轮,初始安装相位相同,齿轮1为太阳轮,太阳轮两边对称布置2对双偏心卵形齿轮,分别为中间轮2、3和行星轮4、5,栽植臂与行星轮固连,行星架与太阳轮共轴心。工作时,太阳轮固定不动,行星架转动(为动力源),中间轮2、3绕太阳轮转动,带动行星轮4、5周期性转动;栽植臂6、7分别和行星轮4、5固结,作复合运动;其牵连运动时随着齿轮箱作匀速顺时针转动,相对运动时随着行星齿轮做不等速逆向转动,实现秧针的取秧、送秧、回转、避让和回程这一系列循环运动。

1,5.行星轮 2,4.中间轮 3.太阳轮 6,7.插植臂
2.2 基本参数及结果分析
基本参数如表1所示。
双偏心卵形齿轮行星系分插机构,根据表1的数据,通过在SolidWorks中虚拟制造和在Adams对虚拟样机的动态仿真,仿真模型如图5所示。图5中:1为秧针,2为双偏心卵形齿轮轮系,得到秧针的静轨迹和动轨迹如图6所示。
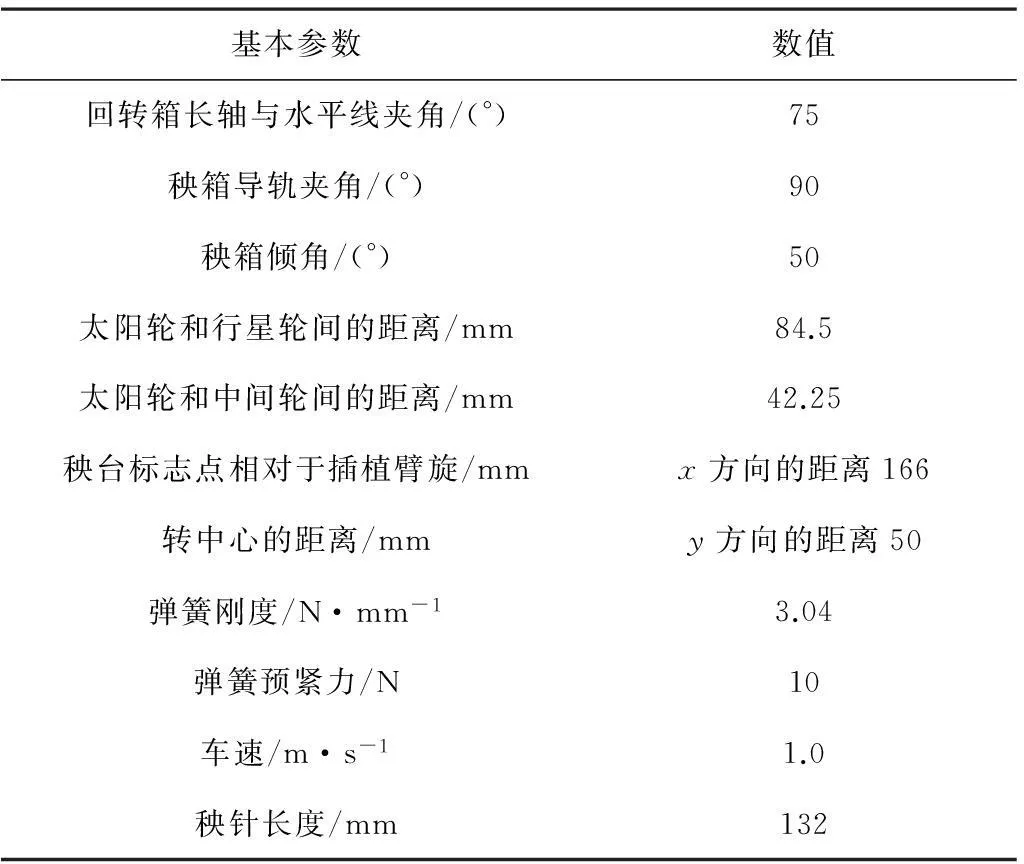
表1 基本参数
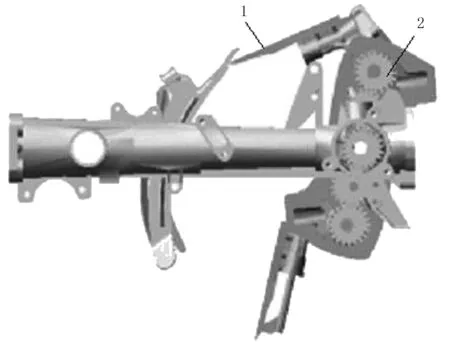
图5 仿真模型

图6 双偏心卵形齿轮行星系“海豚曲线”
由图6计算得到:取秧角为38°,秧箱倾角为50°,实际整个曲线中,最大推秧角为78°。秧针轨迹与秧箱的方向垂直或近似垂直,这样就能避免取秧时造成秧苗的折断损伤。但是,若根据传统插植机设计要求中的直立性三角关系:推秧角-取秧角=秧箱倾角,理论计算得出最大推秧角为88°。上述结果表明:实际取秧角变大,推秧角也有所增大;但不再严格遵循上述的直立性三角关系,所以进一步对其进行改进。
3分插机构对于秧箱导轨的调整
为了既能做到秧针轨迹与秧箱的方向垂直或近似垂直,又能够保持秧苗的直立性,本文对秧箱导轨进一步做出改进。基于双偏心卵形齿轮行星系分插机构,将秧箱导轨夹角从原来的90°分别调整为85°、80°、75°,调整后秧门的位置如图7所示。
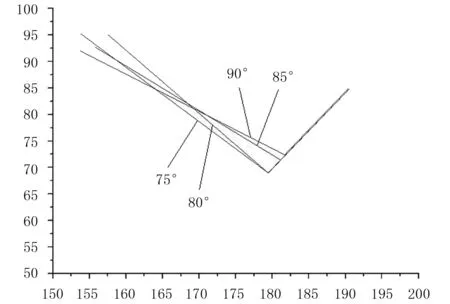
图7 不同秧箱导轨夹角下秧门位置
当秧箱导轨夹角变化时,秧门的相对位置也会发生变化,这意味着秧苗和秧针的夹角也会发生变化。当秧门导轨夹角小于90°时,由于和秧盘接触部分是烂泥,具有不可确定性因素,故秧苗和秧针的夹角与秧门导轨夹角的变化不成一定的比例。随着秧箱导轨夹角的减小,秧苗和秧针的夹角会比原来有所增大。所以,推秧角-取秧角=秧箱倾角这个三角关系也会得到平衡,推秧角加上秧针与秧苗的夹角也可以更接近90°,从理论上保持了秧苗的直立性。通过双偏心卵形齿轮行星系插秧机“海豚曲线”的结果分析:秧苗和秧针夹角要增大10°,才能够平衡直立性三角关系,故对秧箱导轨调整的结果:秧箱导轨夹角为80°。其“海豚曲线”如图8所示。

图8 秧门导轨夹角为80°时“海豚曲线”
4结论
1) 提出了采用新型双偏心卵形齿轮行星系分插机构的设计方案,利用双偏心卵形齿轮行星系代替传统齿轮行星系。
2) 建立了新型双偏心卵形齿轮行星系分插机构虚拟样机模型,仿真结果表明:秧针轨迹与秧箱的方向垂直或近似垂直,避免了取秧时对秧苗的损伤,提高秧苗的栽植质量。
3) 进一步优化双偏心卵形齿轮行星系分插机构,对秧箱导轨夹角做出调整,得到最合适的秧箱导轨夹角。即秧箱导轨夹角变为80°,推秧角为78°,推秧角与秧苗和秧针夹角的和接近90°。
参考文献:
[1]张宏业,周景文.水稻插秧机发展概况[J].农牧与食品机械,1992(4):2-6.
[2]李革.高速水稻插秧机关键技术研究[D].杭州:浙江大学,2006.
[3]李福生,尹种芳,张遵连,等.非圆齿轮与特征齿轮传动设计[M].北京:机械工业出版社,1983: 87-101.
[4]陈建能,赵匀.高速插秧机椭圆齿轮行星系分插机构的参数优化[J].农业机械学报,2003,34(5):47-49.
[5]俞高红,张玮玮,孙良,等.偏心齿轮-非圆齿轮行星轮系在后插旋转式分插机构中的应用[J].农业工程学报,2011,27(4):100-105.
[6]赵匀,黄巨明,张国凤,等.变形椭圆轮分插机构运动分析与优化[J].农业机械学报,2011,42(4):66-68.
[7]尹建军,赵匀,张际先.水稻插秧机分插机构的创新设计[J].江苏理工大学学报,2001,22(5):6-7.
[8]俞高红,钱孟波,赵匀,等.偏心齿轮-非圆齿轮行星系分插机构运动机理分析[J].农业机械学报,2009,40(3):82-84.
[9]俞高红,谢仁华,赵匀.椭圆齿轮传动后插旋转式分插机构运动分析与试验[J]. 农业机械学报,2008,39(5):45-49.
[10]李革,赵匀,俞高红.椭圆齿轮行星系分插机构的机理分析和计算机优化[J].农业工程学报,2000,16(4):78-81.
[11]陈建能,赵匀.高速插秧机椭圆齿轮行星系分插机构的参数优化[J].农业机械学报,2003,19(2):23-27.
[12]赵匀,赵雄,张玮炜,等.水稻插秧机现代设计理论与方法[J].农业机械学报,2011,42(3):66-68.
[13]许纪倩,周娜.非圆齿轮行星轮系分插机构运动分析[J].农业机械学报,2007,38(12):74-77.
[14]代丽,孙良,赵雄,等.基于运动学目标函数的插秧机分插机构的参数优化[J].农业工程学报2014,30(3):35-42.
[15]赵匀.机构数值分析与综合[M].北京:机械工业出版社,2005:2-15.
The Design of High-speed Rice Transplanter New Mechanism
Guo Chenhai1,Chen Liguo1,Ge Jing2,Cao Xiaohui1,Shen Yan2
(1.School of Automotive and Traffic Engineering, Jiangsu University,Zhenjiang 212013,China; 2.Changzhou Engineering Research Institute of Jiangsu University,Changzhou 213164, China)
Abstract:For the phenomenon of high-speed rice transplanter likely to cause injury when it works in the stage of getting seedling, the new design scheme of double eccentric oval gear planetary with transplanting mechanism system is put forward. Through the design of double eccentric oval gear, establish the system model,get the new type of double eccentric ovate transplanting mechanism with planetary gear of virtual prototype.The virtual prototype model of mechanism is established and simulation analysis is done, the analysis results show that compared with the traditional design scheme, in the new design scheme,the relationship between seedling needle trajectory and the seedling door position was optimized. When taking seedling, seedling needle trajectory and seedling plate are almost vertical, which ensures the quality of the seedlings; when the seedling box guide angle turns to 80 °,seedling angle to 78 °,the sum of seedling pushing angle and seedling or seedling needle angle closes to 90 degrees, seedlings orthostatic is optimized after the planting, and agronomic requirements is meeted .
Key words:high-speed rice transplanter;orthostatic;double eccentric oval gear;seedling box guide angle
中图分类号:S223. 91
文献标识码:A
文章编号:1003-188X(2016)09-0113-04
作者简介:陈丽果(1989-),女,山东菏泽人,硕士研究生,(E-mail)clg117@126.com。通讯作者:郭晨海(1959-),男,江苏盐城人,副教授,硕士生导师,(E-mail)jsdxgh@163.com。
基金项目:江苏高校优势学科建设工程项目(PAPD)
收稿日期:2015-09-01
