
免耕播种机播种深度实时监测系统
2016-03-23 06:10朱龙图于婷婷黄东岩贾洪雷
农机化研究 2016年9期
闫 荆,朱龙图,于婷婷,黄东岩,贾洪雷
(1.吉林农业大学 信息技术学院,长春 130118; 2. 吉林大学 工程仿生教育部重点实验室,长春 130022)
免耕播种机播种深度实时监测系统
闫荆1,朱龙图1,于婷婷1,黄东岩1,贾洪雷2
(1.吉林农业大学 信息技术学院,长春130118; 2. 吉林大学 工程仿生教育部重点实验室,长春130022)
摘要:为了提高秸秆覆盖地免耕播种作业后的出苗一致性,应用聚偏二氟乙烯Polyvinylidence fluoride PVDF压电薄膜制作两种不同粘贴模式胎面形变传感器,实时监测限深轮的形变量,由此间接测量播种机播种深度,并对两种传感器进行对比试验。系统硬件电路对传感器产生的信号放大滤波,提取信号峰值,系统根据峰值信号实时监测播种深度。试验结果表明:两种传感器的输出电压均与限深轮承受的载荷成线性的正比关系;拱形传感器的灵敏度明显高于平铺形传感器,在作业速度为5~8km/h时,系统测量准确率达到85%。
关键词:实时监测;免耕播种机;播种深度;压电薄膜;单片机
0引言
旱作保护性耕作是现代农业耕作技术,代表着先进农业耕作制度、耕作方式,是目前旱作农业推崇的先进、适用、经济、环保的耕作方法。在保护性耕作系列流程中包括有秸秆残留物管理技术、深松替代深翻技术、残留物覆盖耕作技术及药剂锄草免中耕4项技术,其核心技术是覆盖免耕播种技术[1-3]。覆盖免耕播种技术是以作物秸秆残茬覆盖在地表,不翻耕土壤,通过免耕播种机一次完成破茬、开沟、播种、施肥、覆土、镇压等作业。由于地表覆盖残茬增加了地表的粗糙度,免耕播种机播种深度控制成为能否完成高效、优质、快捷的机械化播种任务成为关键。
近年来,免耕播种机播种深度自动控制技术发展较快[4-7],不少科研工作者将电液控制仿形系统应用在大豆、玉米精播机上控制播种深度。进行播种作业时,系统由超声波传感器感应地面起伏的变化,实时将地面起伏信号转换成电信号;根据该电流信号驱动液压缸控制四连杆机构上下浮动,实现播种深度的控制。这种仿形机构虽然能够在一定程度的起伏地表自动控制播种深度,但土壤坚实度差异较大时,仅依靠超声波传感器检测地表的起伏变化,很难使播种深度一致性达到预期效果[8-11]。
笔者所在项目组研制开发了基于PVDF压电薄膜的气动免耕播种机播种深度自动控制系统[7],系统应用PVDF压电薄膜测量免耕播种机限深轮的胎面形变量,根据限深轮的胎面形变量控制空气弹簧推力,控制四连杆上下浮动,从而控制播种深度。该系统响应速度快,仿形性能可靠,能够精确控制播种深度。为进一步提高该系统灵敏度,对比分析了压电薄膜传感器的两种不安装模式,设计了播种深度实时监测系统的信号处理电路,对两种不同安装模式的压电薄膜传感器信号进行了对比测试,说明了其各自的优缺点,为深入研究基于PVDF压电薄膜的气动免耕播种机播种深度自动控制系统提供了依据。
1系统工作原理
如图1(a)所示:免耕播种机的四连杆机构可以使播种单体根据地表的起伏变化上下浮动。播种单体的开沟部件主要有爪轮、圆盘波纹刀、限深轮和开沟圆盘,一对爪轮左右对称安装在圆盘波纹刀两侧靠前位置,一对橡胶限深轮左右对称安装在开沟圆盘的两侧靠后位置。播种作业时,播种单体靠自重与空气弹簧推力使爪轮、圆盘波纹刀和开沟圆盘的下部切入到土壤中,限深轮压在种床土壤表面避免开沟圆盘切入土壤过深,开沟圆盘与限深轮的高度差为播种机开沟深度。播种机前进时,爪轮旋转并拨开秸秆与杂草,波纹圆盘刀切开地表与根茬并松土,开沟圆盘切入到土壤中,并且在其两侧堆积足够的土壤以便填埋种子。作业时必须保证播种单体对地表有足够压力,播种单体对地表压力能够反映出开沟圆盘的开沟效果以及种子的填埋效果,橡胶限深轮在压力的作用下产生变形,压力越大变形越大。因此,可以根据橡胶限深轮产生的变形量间接判断播种机的播种深度。
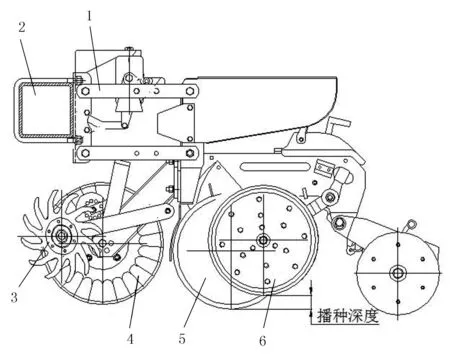
1.机架 2.四连杆机构 3.爪轮 4.圆盘波纹刀
2PVDF压电薄膜传感器
传感器选用美国Measurement Specialty公司生产的型号为DT2-028K/L压电薄膜传感器,如图2所示,其尺寸参数如表1所示。
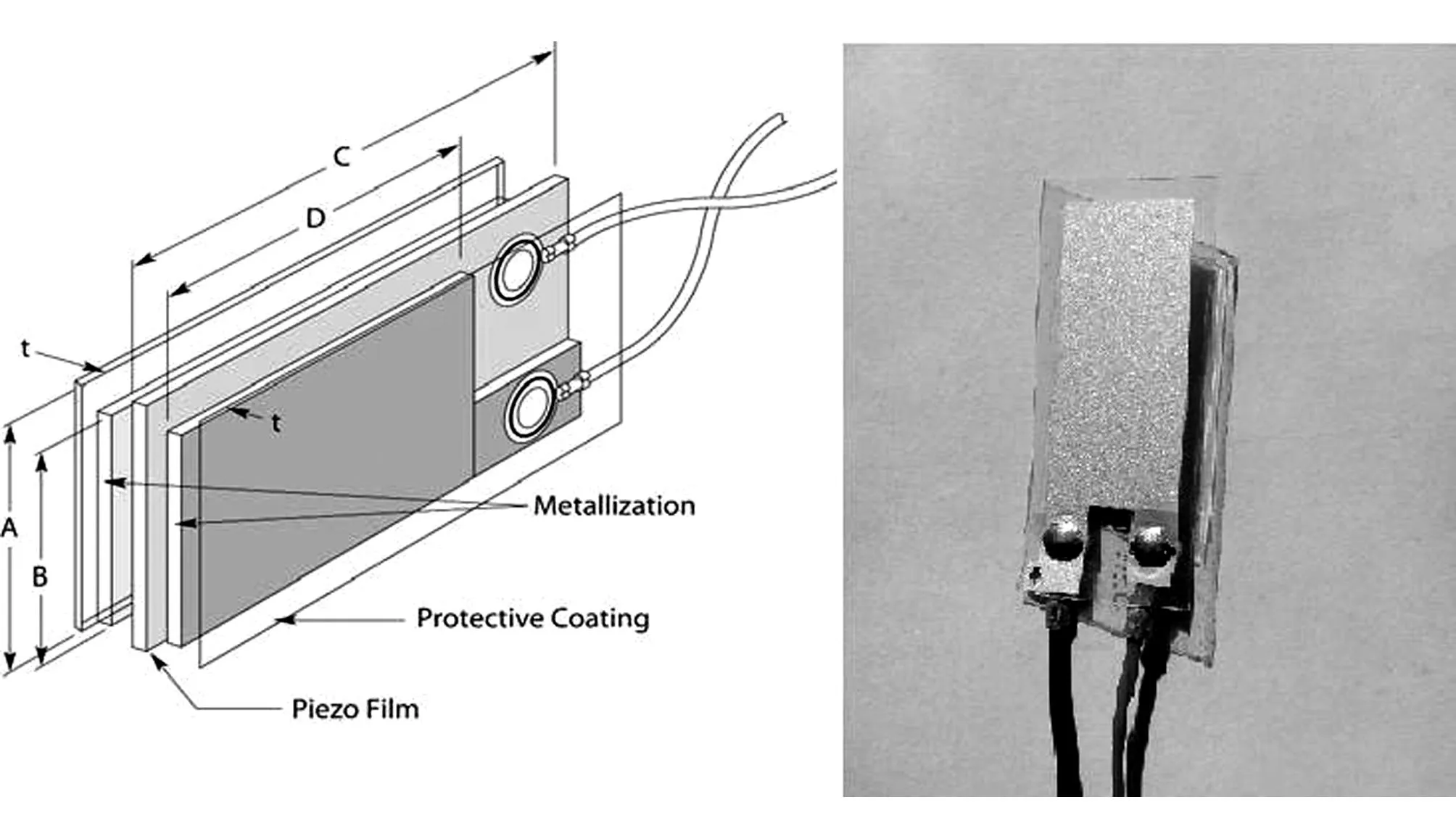
图2 PVDF压电薄膜传感器外形图

mm
如图3所示:PVDF压电薄膜传感器分别以两种不同的安装模式粘贴在橡胶限深轮内表面:一种以平铺的模式粘贴,另一种以拱形的模式粘贴。橡胶限深轮与地面的接触部分称为印痕区,传感器进入和离开印痕区时会产生周期性形变,形变使PVDF压电薄膜的两个上下金属电极表面出现正负相反的电荷。对压电薄膜产生的电荷信号进行放大滤波后,其峰值信号能够反映限深轮胎面形变量的大小,从而可以间接判断此时播种机的播种深度。

图3 PVDF压电薄膜传感器安装模式
3系统硬件电路设计
系统硬件电路包括电荷放大器、信号滤波器、峰值保持器、A/D转换器、微处理器和PC机等。PVDF传感器所产生的信号太过微弱,不便于直接采集,需要经过电荷放大器放大处理。电荷放大器除了起到放大电荷信号的作用,还能将电荷信号转换成便于测量的模拟电压信号。之后,信号滤波器将对该模拟电压信号再进行滤波处理,用以滤除电压信号中的低频干扰信号。然后,模拟电压信号经峰值保持器后,其峰值电压将会被保持,而A/D转换器则将该峰值信号变为数字信号;该数字电压信号经微处理器采集、处理后,再被传至PC机上,以完成相关的处理、显示和分析等操作。同时,微处理器将会给峰值保持器一个复位电平,以便峰值保持器能够持续反复的工作。
本文采用的微处理器为STC12C5A60S2单片机,内部集成专用复位电路、PWM调制器及10位A/D转换器等。本文所用的A/D转换器为该单片机内部所集成;选用的峰值保持器为AD公司PKD01,能跟踪模拟输入信号,并能保持该信号达到最大值;采用LCD12864液晶屏作为显示屏;微处理器与PC机之间通过RS-232串行接口进行通信。
图4中,电荷放大器和信号滤波器是整个信号处理中最为关键的两部分。电荷放大器除了具有放大微弱信号的功能外,还具有将高阻抗输入转换成低阻抗输出的能力;而信号滤波器则可以起到消减和抑制噪声信号的作用。
电荷放大器是一个带反馈电容器的高增益运算放大器,其输出电压Vo正比于输入电荷量Q,并由反馈电容Cf所决定,与信号的频率特性无关。在该测量系统中采用电荷放大器的另一优势是输出模拟电压信号不受导线间的电容影响。
由于PVDF薄膜在放电过程中存在漏电现象,这使得误差得以产生,因此可以通过增加放大器中的放电时间常数来达到最小化误差的目的。在电路的电荷转换部分采用高输入阻抗运算放大器CA3140来实现电荷到电压的转换功能。该运算放大器的输入阻抗可达1.5TΩ,带宽为4.5MHz,典型偏置电流强度为10pA,输入偏移电压小于5mV。
系统噪声包括来自所使用的元器件、50Hz的工频干扰、电磁干扰和热电效果等。本研究分别采用低通滤波器和50Hz双T陷波滤波器来消减、抑制器件噪声和50Hz工频干扰。
PVDF压电传感器是一种弱阻尼振荡系统,在高频段,存在较高的谐振峰,从而引起高频噪音。此外,在一些动态测量中,有时候通频带远远超过了实际的需求,造成低频带的测试精度被不需要的高频带所干扰。因此,在本研究中使用低通滤波器是非常有必要的,其能够让低频交流分量通过,并极大地衰减不需要的高频分量。
无源低通滤波器具有结构简单、抗干扰性强等特点,然而由于其阻抗频率特性具有弱共振性能,使其具有弱选择性的特征。为了克服这些缺点,将有源元器件(如运算放大器)加入到RC滤波器的设计之中,从而形成了有源RC滤波器。在有源RC滤波器中,通频带内的信号不但不会衰减,反而能够得到增益。
图4中滤波单元属于5阶巴特沃思低通滤波器,其截止频率为500Hz。采用低噪声前置放大器、高精密金属膜电阻和陶瓷电容来消减由元器件所引入的噪音。

图4 系统硬件电路
50Hz双T陷波滤波器电路主要包括两部分:第1部分是一个双T陷阱,可以看着作为2阶带阻滤波器。对于50Hz陷波滤波器,其中心频率和中心角频率分别为50Hz和100rad/s。该电路只对50Hz的信号起作用。第2部分是一个集成运算放大器,选用的是LM324,可以为信号提供有源反馈,提高了信号质量。
4系统软件设计
系统程序流程图如图5所示。系统工作开始后,首先对系统工作模块、相关寄存器和I/O口进行初始化设置;接着,系统运行A/D采集程序,以获取峰值保持器所保持的峰值信号;然后,由程序控制单片机给峰值保持器一个复位电平,以清除所保持的峰值信号;之后,再清除所给的复位电平,即让峰值保持器处于峰值检测状态,以便A/D采集器能够完成下次峰值信号的采集;接着,程序将执行数据处理操作,并将处理后的结果显示在LCD液晶屏上;最后,通过串口传输程序将处理后的数据上传至PC机。

图5 程序流程图
5试验结果与分析
5.1 PVDF压电薄膜传感器承载试验
试验使用平铺与拱形两种不同粘贴模式的传感器,为研究不同地表状况对系统输出信号的影响,在土槽中铺设出平均坚实度为1.4kg/cm2和3.5kg/cm2,长度5m,宽度0.5m的软硬两条种床。限深轮的行进速度为5km/h。传感器输出电压与限深轮承载的关系曲线如图6所示。其中,曲线1为限深轮行进在硬种床时,拱形传感器的输出电压;曲线2为限深轮行进在软种床时,拱形传感器的输出电压;曲线3为限深轮行进在硬种床时,平铺形传感器的输出电压;曲线4为限深轮行进在软种床时,平铺形传感器的输出电压。由图6可以看出:随着限深轮承受载荷的增加,限深轮胎面变形量变大,两种传感器的输出电压增加,传感器的输出电压与限深轮承受的载荷成线性的正比关系;拱形传感器的灵敏度明显高于平铺传感器的灵敏度;拱形传感器受地表坚实度影响较大,平铺形传感器几乎不受地表坚实度的影响。

图6 传感器输出电压与限深轮承载关系曲线
5.2 田间性能试验
2015年春季,在吉林农业大学试验农场进行留茬地表的田间试验,如图7所示。试验地土壤为黑钙土,前茬作物为玉米,地表土壤含水率0~5cm深度为 16.7%,土壤容重1.6g/cm3,种床土壤平均坚实度2.4kg/cm2,留茬高度10~16cm。系统安装在吉林康达2BMZF-2X型免耕精量施肥播种机上,设定播种深度为50mm。随机选取3个测区,测区长度10m。拖拉机匀速通过试验区,拖拉机作业速度5~8km/h;播种机通过后,将开沟器推出的松散土壤刮掉,以垄体的初始平面为测量基准,不同作业速度下重复测量播深,试验结果如表2所示。

图7 田间试验效果图

作业速度/km·h-1电压值/mV拱形传感器平铺形传感器播深/mm5121605161296255712863538985845
在吉林农业大学试验农场进行秸秆覆盖地表的田间试验,试验地为玉米保护性耕作,地表土壤含水率0~5cm深度为 19.4%,土壤容重1.2g/cm3,种床平均坚实度2.7kg/cm2;播种前地表秸秆覆盖率平均为75.15%,播后平均为47.1%,地表的秸秆植被覆盖量为0.73kg/m2。设定播种深度为 50mm;随机选取3个测区,测区长度10m,为便于测量,卸下播种机覆土装置。试验结果如表3所示。

表3 秸秆覆盖地试验结果
综上所述,对比两种不同模式的传感器,无论在留茬地与秸秆覆盖地,均能够反映播种深度变化;播种速度不影响传感器的输出;拱形传感器相对比较灵敏。由于所选择地块土壤坚实度变化不大,拱形传感器的输出电压没有受到地表状况的影响,两种传感器的测量准确度均达到85%以上。
6结论
1)应用PVDF压电薄膜制作两种不同粘贴模式胎面形变传感器,实时监测限深轮的形变量,由此间接测量播种机播种深度。对两种传感器进行对比试验,试验结果表明:两种传感器的输出电压均与限深轮承受的载荷成线性的正比关系;拱形传感器的灵敏度明显高于平铺形传感器,但拱形传感器受地表坚实度影响较大,平铺形传感器几乎不受地表坚实度的影响。
2)设计了结构简单的播种深度监测系统硬件电路及相应软件,系统硬件电路能够有效地对PVDF传感器所产生的信号进行放大滤波,采集传感器信号的峰值,计算峰值平均值。
3)田间试验结果表明:播种深度监测系统在播种机作业速度为5~8km/h时,测量准确率达到85%。
参考文献:
[1]臧英,高焕文,周建忠. 保护性耕作对农田土壤风蚀影 响的试验研究[J]. 农业工程学报,2003,19(2):56-60.
[2]高焕文,李洪文,李问盈. 保护性耕作的发展[J]. 农业机械学报,2008,39(9):43-48.
[3]胡立峰,李洪文,高焕文. 保护性耕作对温室效应的影响[J]. 农业工程学报,2009,25(5):308-312.
[4]高焕文,李洪文,姚宗路. 我国轻型免耕播种机研究[J].农业机械学报,2008,39(4):78-82.
[5]廖庆喜,高焕文,舒彩霞. 免耕播种机防堵技术研究现状与发展趋势[J].农业工程学报,2004,20(1):108-112.
[6]尹彦鑫,郑永军,成智华,等.少免耕播种机牵引阻力远程监测系统[J].农业工程学报,2014,30(6):1-8.
[7]黄东岩,朱龙图,贾洪雷,等.基于压电薄膜的免耕播种机播种深度控制系统[J].农业机械学报,2015,46(4):1-8.
[8]Anthonis J, Mouazen A M, Saeys W, et al.An automatic depth control system for online measurement of spatial variation in soil compaction, part 3:Design of depth control system[J].Biosystems Engineering, 2004, 89(1): 59- 67.
[9]Mouazen M, Anthonis J, Saeys W, et al. An automatic depth control system for online measurement of spatial variation in soil compaction, part Ⅰ:Sensor design for measurement of frame height variation from soil surface[J].Biosystems Engineering, 2004, 89(2): 139- 150.
[10]Saeys W, Mouazen A M, Anthonis J, et al.An automatic depth control system for online measurement of spatial variation in soil compaction, part 2:Modelling of the depth control system[J]. Biosystems Engineering, 2004, 89(3): 267-280.
[11]Mouazen M, Anthonis J, Romon H. An automatic depth control system for online measurement of spatial variation in soil compaction, part 4: Improvement of compaction maps by using a proportional integrative derivative depth controller[J].Biosystems Engineering, 2005, 90(4): 409-418.
Abstract ID:1003-188X(2016)09-0214-EA
Seeding Depth Real-time Monitoring System for a No-till Planter
Yan Jing1, Zhu Longtu1,Yu Tingting1,Huang Dongyan1, Jia Honglei2
(1.College of Information, Jilin Agricultural University, Changchun 130118, China; 2.Key Laboratory of Bionics Engineering, Ministry of Education,Jilin University, Changchun 130022, China)
Abstract:In order to improve the consistency of seedling on the straw mulching farmland, a deformation sensor made of polyvinylidene fluoride, or PVDF, film is fixed on the inner surface of depth wheel with two different types to monitor the deformation of the wheel in real-time. According to the deformation, the seeding depth can be measured indirectly, and the two different types of sensor are compared. The system hardware circuit can amplify and filter the signal generated by the sensor, and can extract the signal peak. The system is able to monitor the seeding depth in real-time based on the peak signal. The result shows that the output peak voltage of the two types of sensor is linearly proportional to the load of the depth wheel. And the sensitivity of the arched sensor is significantly higher than that of the tiled sensor. When the speed of the planter is between 5Km/h to 8Km/h, the accuracy of the system is more than 85%.
Key words:real-time monitoring; no-till planter; seeding depth; piezoelectric film; chip microprocessor
中图分类号:S232.2+6
文献标识码:A
文章编号:1003-188X(2016)09-0214-05
作者简介:闫荆(1990-),女,北京人,硕士研究生,(E-mail)512692688@qq.com。通讯作者:黄东岩(1976-),男,长春人,教授,博士,(E-mail)171228198@qq.com。
基金项目:“十二五”农村领域国家科技计划项目(2014BAD06B03);长春市科技计划项目(14KG087); 吉林省省级粮食生产发展专项(2014-2015)
收稿日期:2015-08-13
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
吉林农业·下半月(2016年12期)2016-12-26
科技视界(2016年21期)2016-10-17
电脑知识与技术(2016年11期)2016-06-17
科技视界(2016年3期)2016-02-26
物联网技术(2015年11期)2015-11-26
