
基于RBF网络的果蔬采摘机器人运动轨迹控制研究
2016-03-23 06:10樊卫国汪小志
农机化研究 2016年9期
薛 亮,樊卫国,汪小志
(1.苏州农业职业技术学院 信息与机电工程系,江苏 苏州 215008;2.南昌工学院,南昌 330108;3.武汉理工大学,武汉 430070 )
基于RBF网络的果蔬采摘机器人运动轨迹控制研究
薛亮1,樊卫国1,汪小志2,3
(1.苏州农业职业技术学院 信息与机电工程系,江苏 苏州215008;2.南昌工学院,南昌330108;3.武汉理工大学,武汉430070 )
摘要:为了提高果蔬采摘机器人机械手运动的精确性,提高机器人移动的效率,提出了一种基于遗传算法和RBF网络的机器人运动轨迹控制方法,并对果蔬机器人机械手的活动和整体的移动轨迹进行优化,有效地提高了果蔬采摘机器人的工作精度和作业效率。为了验证设计的采摘机器人的可靠性,在大棚内对机器人的采摘性能进行了测试,包括机器人移动路径规划和机械手路径规划。通过测试发现:使用RBF神经网络算法可以有效地控制机械手在三维空间内的运动;在遗传算法控制下,机器人可以通过较少的计算次数利用神经网络算法搜索得到最优路径,计算精度达到了99%以上。其计算精度及效率高,为高效果蔬采摘机器人的设计提供了较有价值的参考。
关键词:RBF神经网络;果蔬采摘;遗传算法;轨迹控制;机器人;机械手
0引言
随着微电子技术、传感器技术、控制技术和机械制造工艺水平的飞速发展,机器人的应用领域逐步从汽车拓展到其它领域。在各种类型的机器人中,模拟人体手臂而构成的关节型机器人,具有结构紧凑、所占空间小、运动空间大等优点,是应用最为广泛的机器人之一。关节型机器人也是农业采摘机器人中最常用的机器人类型,最核心的设计部分为机器人视觉设计,机器视觉是控制机器运动轨迹的关键。为了提高机器人视觉果目标锁定的精度,提高机器人的作业效率,本文在机器人轨迹控制算法中引入了遗传算法和RBF设计网络算法,以期提高机器人的轨迹控制精度和效率。
1总体设计
采摘机器人的设计核心是机器视觉的设计,机器视觉精度关系到采摘的准确性和采摘效率。机器人视觉是利用计算模拟功能代替人视觉功能,从客观存在的果蔬图像中提取有用信息,并对信息进行加工处理,最终实现机器人实际的测量和控制。对于机器人视觉系统的设计,本次研究主要是对图像捕捉模块、图像处理模块和智能化决策模块的设计。机器人总体设计框架如图1所示。
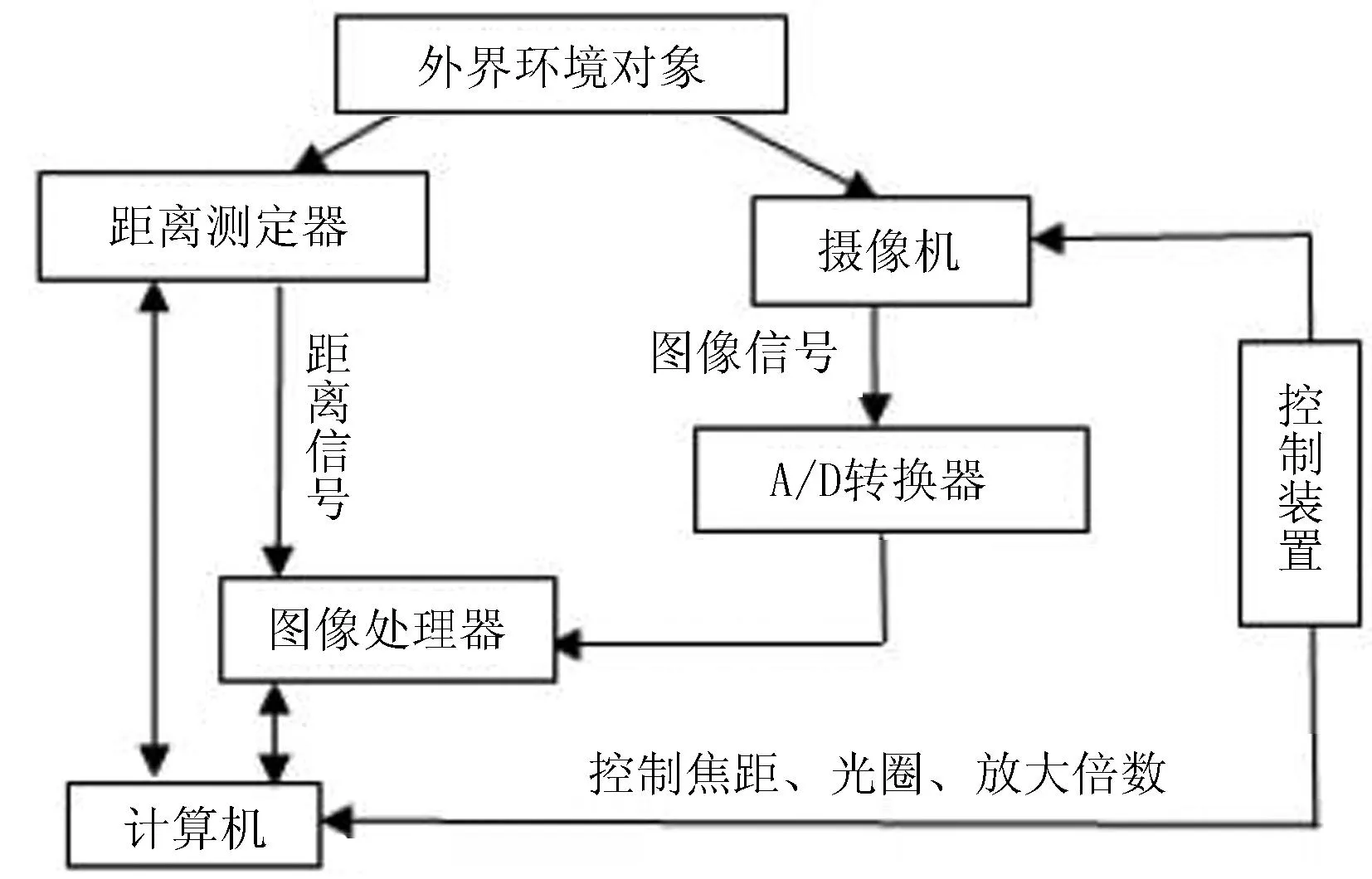
图1 机器人总体设计框架
采摘机器人的作业目标为果实,通常情况下采用摄像机对目标对象进行转换,再利用A/D转换为数字信号传送到图像处理系统,然后机器人根据像素、颜色和亮度信息提取果实目标特征,通设定的精度和判断条件,来输出控制结果。其中,机器人工作的核心技术为图像转换、图像处理和图像分割。通过图像处理技术锁定待采摘果实目标图像的过程如图2所示。

图2 采摘目标图像锁定过程
图像的锁定过程主要依据摄像跟踪目标的状态,目标锁定过程包括目标搜索、目标切换、瞄准目标和跟踪目标。因此,通过图像处理技术,最终输出锁定采摘目标果实的稳定图像。
2机器人机械手和移动控制算法优化
在果实采摘机器人的设计中,由于果蔬的外表非常脆弱,且果蔬的生长形状复杂,因此机器人执行末端的设计是农业机器人设计的核心,也是影响果蔬采摘精度和效率的关键因素。
图3为果蔬采摘机器人执行末端的总体设计示意图。其机械结构由吸盘和两指夹持器组成,在机器人执行末端安装了摄像头,通过对果蔬图像的采集,对路径进行规划。

图3 果蔬采摘机器人执行末端设计
图4表示果蔬采摘机器人执行末端夹持器的结构示意图。由图4可以看出:在执行末端加持器上安装有摄像头和触觉传感器,摄像头负责采集图像,触觉传感器可以防止碰撞障碍物,而机械手运动轨迹的控制主要通过关节来实现。关节型机器人仿真机械手如图5所示。

1.直流电机 2.手指 3.限位开关 4.摄像头 5.支架

图5 机器人机械手轨迹控制关键示意图
该机械手适合多种果蔬的采摘,包括番茄、苹果及柑橘等;但其控制算法交复杂,因此本文结合RBF设计网络算法对其进行控制。一般来说,RBF设计网络算法的输出可以表为

(1)
其中,φi(x)表示神经网络隐含层的输出;wt表示神经网络的权值。对于径向基函数RBF最常用的基函数为
(2)
其中,x-xc表示轨迹控制过程中的某一个点到中心的欧氏距离;σ表示控制误差。网络输出的控制点响应可以表示为

(3)

(4)
其中,nc表示基函数中包含的中心向量的个数;aj表示从训练的样本数据中选出的第j个中心向量。对机器人路径轨迹的控制,可以看出对一系列轨迹点的控制,假设轨迹点数据样本为(xi,yi)(i=1,2,3,…,N),连接权中心和宽度通过最小化可以得到
(5)
其中,θ=(θ1,θ2,…,θn),a=(a1,a2,…,an)。该式的意义在于通过计算,得到网络输出f1与逼近误差yi最小。在计算过程中,为了加速收敛,引入了遗传算法,其计算步骤为:
1)适应值确定。首先设计一个适应度值,其输出样本的平方为适应度函数,有
心理弹性(resilience)是影响主观幸福感的又一重要变量,它是指个体在危险情境下良好适应的动态过程[10],是个体在面对严峻或持久挑战时仍能保持其情绪和认知幸福感的能力[11]。诸多研究已证实,心理弹性对主观幸福感具有实质性影响[12,13],心理弹性涉及逆境下的积极适应模式[15],是主观幸福感的重要预测因素[6]。还有研究表明,心理弹性与大学生的乐观、积极情绪显著正相关[15],提高心理弹性可能提升大学生压力下的积极情绪,缓解消极情绪[16]。
(6)
2)复制。f1表示神经网络实际输出值,yi表示逼近误差的数值。在遗传算法训练时,其目的是使f值最小,加速每个训练样本的适应值为qi,其计算公式为
qi=3-f(训练)-2·f(测试)
(7)
按照N·qi/∑qi决定第i个个体在下一代中复制自身的数目,其复制自身数目最高的是适应值最高的个体。
3)交叉。按照一定的概率从复制过来的个体中对两个个体进行交叉,从而生成新的个体空间。
4)变异。把交叉后个体的某一位按照一定的概率进行取反运算,即将1变为0,或者将0变为1。每一位发生变异的概率较小,而遗传算法可以通过繁殖和交叉,使变异算子能够搜索到问题空间的每一点,算法具有全局收敛性。
3采摘机器人性能测试
为了验证本次研究设计的采摘机器人的可靠性,在大棚内对机器人的采摘性能进行了测试,测试项目包括机器人移动路径规划和机械手路径规划,测试场景如图6所示。

图6 采摘机器人测试场景图
为了验证本文设计的机器人运动控制轨迹算法的可靠性,对西红柿进行了采摘,通过采摘测试得到了机械手的三维轨迹规划结果如图7所示。
由图7可以看出:利用RBF神经网络算法可以实现机械手在三维空间内的路径规划,通过对权值的不断调整,得到最佳遗传算法适应度值,最终定位到需要采摘的果蔬位置。
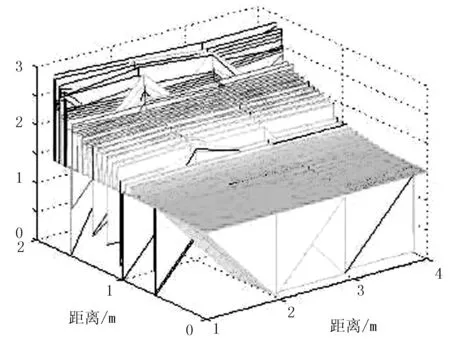
图7 机械手路径规划三维空间图
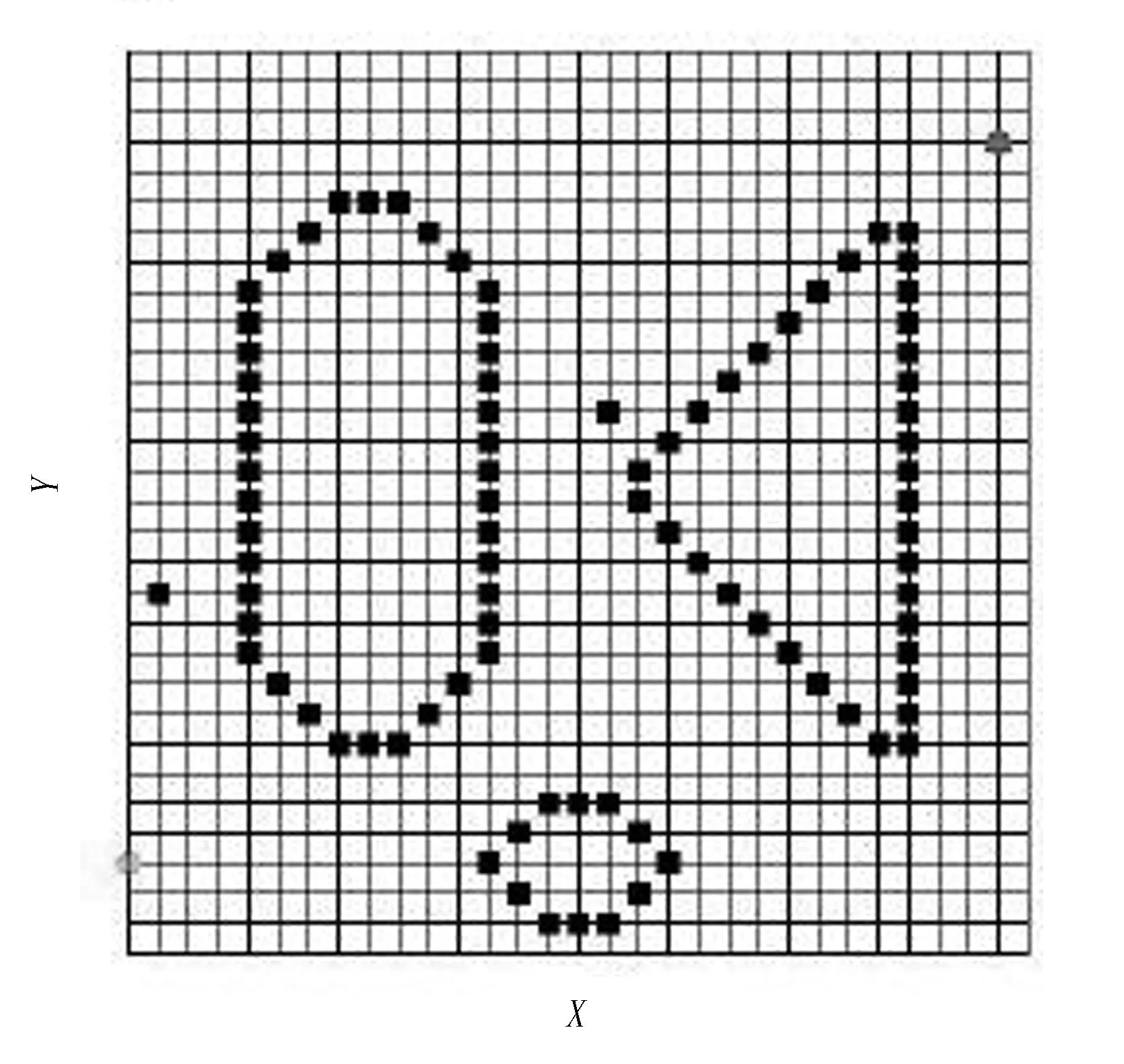
图8 路径轨迹控制栅格图

图9 路径规划最终结果
由图9可以看出:机器人通过路径规划可以成功地躲避障碍物,且在遗传算法的作用下,机器人可以搜索,得到最短的行驶路径。
不同障碍物下,f1表示平均适应值;f表示最优适应值;N表示达到最优路径时所需的计算次数。机器人通过路径规划计算,得到的RBF神经网络算法的计算参数。由表1可以看出:在遗传算法样本训练的情形下,机器人可以通过较少的计算次数搜索得到最优路径,且计算精度达到了99%以上。其计算精度高,计算效率快,从而大大提高了采摘机器人的性能。对采摘破碎率进行测试,得到了表2所示的结果。

表1 不同障碍物下神经网络算法计算参数
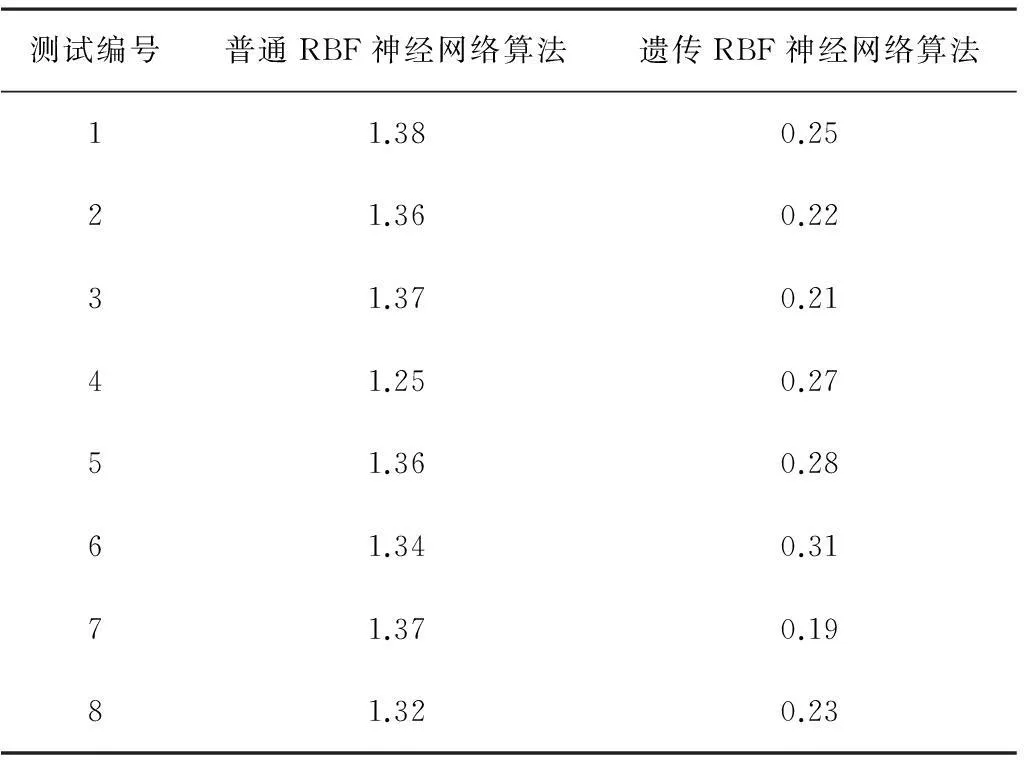
表2 破碎率测试
为了对比本文设计机器人的效率,对普通RBF神经网络算法控制的机器人和本文设计机器人的采摘破碎率进行了统计。通过对采摘机器人8次采摘结果的统计发现,本文设计的机器人的果蔬采摘破碎率有明显降低,采摘效果较好。
4结论
1)机器视觉是控制机器人运动轨迹的关键技术。为了提高机器人机器视觉的精度,提高机器人运动轨迹的效率,提出了一种基于遗传算法和RBF网络的机器人运动轨迹控制方法,通过该方法对果蔬机器人机械手的活动和整体的移动轨迹进行了优化,从而提高了机械手三维轨迹控制的效率,使机器人能够成功躲避障碍物,并搜索到最佳路径。
2)为了进一步测试采摘机器人的性能,对遗传算法控制下的机器人进行路径搜索测试。通过测试发现:机器人可以在较少的计算次数下得到最佳的搜索路径,精度达到了99%以上,计算效率高,是一种可靠的机器人轨迹控制算法。
参考文献:
[1]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
[2]尹建军,武传宇,YangSimonX,等.番茄采摘机器人机械臂避障路径规划[J].农业机械学报,2012(12):171-175.
[3]姬伟,程风仪,赵德安,等.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013(11):253-259.
[4]叶健,葛临东,吴月娴.一种优化的RBF神经网络在调制识别中的应用[J].自动化学报,2007,33(6): 652-654.
[5]乔俊飞,韩红桂.RBF神经网络的结构动态优化设计[J].自动化学报,2010,36(6):865-868.
[6]葛哲学,孙志强.神经网络理论与MATLAB R2007[M].北京:电子工业出版社,2007:117-120.
[7]宋勇,李贻斌,栗春,等.基于神经网络的移动机器人路径规划方法[J].系统工程与电子技术,2008(2):316-319.
[8]刘淑华,夏菁,孙学敏,等.已知环境下一种高效全覆盖路径规划算法[J].东北师大学报:自然科学版,2011,43(4):39-43.
[9]刘松,李志蜀,李奇.机器人全覆盖最优路径规划的改进遗传算法[J].计算机工程与应用,2009,45 (662):245-248.
[10]刘锁兰,杨静宇.基于模糊理论的2维隶属划分Renyi熵分割算法[J].中国图象图形学报,2009,14 (2):323-327.
[11]刘锁兰,杨静宇,郭克华.基于最大模糊指数熵的模糊目标分割算法[J].计算机科学,2007,34(9):240- 241, 272.
[12]柳平增,毕树生,付冬菊,等.室外农业机器人导航研究综述[J].农业网络信息,2010(3):5-10.
[13]龙建武,申铉京,魏巍,等.一种结合纹理信息的三维Renyi熵阈值分割算法[J].小型微型计算机系统,2011,32(5):947-952.
[14]龙满生,何东健.玉米苗期杂草的计算机识别技术研究[J].农业工程学报,2007,23(7):139-143.
[15]罗荣贵,屠大维.栅格法视觉传感集成及机器人实时避障[J].计算机工程与应用,2011,47(24):233-235.
[16]吕继东,赵德安,姬伟,等.苹果采摘机器人对振荡果实的快速定位采摘方法[J].农业工程学报,2012,28(13):48-53.
[17]吕继东,赵德安,姬伟,等.苹果采摘机器人无线数据传输系统[J].农业工程学报,2010,26(12):225-230.
[18]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋绘,2010,30(3):16-19.
[19]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[20]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[21]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[22]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1):93-96.
[23]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[24]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010(11):130-132, 140.
[25]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
[25]刘继展,李萍萍,李智国.番茄采摘机器人末端执行器的硬件设计[J].农业机械学报,2008,39(3):109-112.
[26]蒋焕煜,彭永石,申川,等.基于双目立体视觉技术的成熟番茄识别与定位[J].农业工程学报,2008, 24(8):279-283.
[27]蔡健荣,李玉良,范军,等.成熟柑橘的图像识别及空间定位研究[J].微计算机信息,2007,23(12-1): 224-225, 314.
[28]司永胜,乔军,刘刚,等.基于机器视觉的苹果识别和形状特征提取[J].农业机械学报,2009, 40(8): 208-213.
Research on Motion Trajectory Control of Fruit and Vegetable Picking Robot Based on RBF Network
Xue Liang1,Fan Weiguo1,Wang Xiaozhi2,3
(1.Department of Information and Electrical Engineering, Suzhou Polytechnic Institute of Agriculture, Suzhou 215008, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108,China; 3.Wuhan University of Technology,Wuhan 430070, China)
Abstract:In order to improve the accuracy of robot manipulator movement and improve the efficiency of robot movement, a methodis proposed based on genetic algorithm and RBF neural network.The robot manipulator's movement and the whole trajectory are optimized. In order to verify the design of the picking robot reliability, in the experimental greenhouse on the robot's picking performance were tested, test items include robot path planning of mobile and manipulator path planning. Through the test, we found that using the RBF neural network algorithm can effectively control of manipulator motion in the three-dimensional space, in under the control of the genetic algorithm, the robot can with less amount of calculation using neural network algorithm search to get the optimal path, and the calculation precision is above 99%, for its high accuracy, which provides a valuable reference for the fast computational efficiency and effect of high vegetable production picking robot design.
Key words:RBF neural network; fruit and vegetable picking; genetic algorithm; trajectory control; manipulator
中图分类号:S225.92;TP391.41
文献标识码:A
文章编号:1003-188X(2016)09-0229-05
作者简介:薛亮(1977-),男,江苏苏州人,讲师,硕士,(E-mail)724104439@qq.com。通讯作者:汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-08-04
猜你喜欢
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
科教导刊·电子版(2016年26期)2016-11-21
电脑知识与技术(2016年25期)2016-11-16
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
通信电源技术(2016年1期)2016-04-16
