
基于MSP430F149智能监控的苹果采摘机器人设计
2016-03-23 06:10朱清智
农机化研究 2016年9期
宣 峰,朱清智,张 毅
(河南工业职业技术学院,河南 南阳 473000)
基于MSP430F149智能监控的苹果采摘机器人设计
宣峰,朱清智,张毅
(河南工业职业技术学院,河南 南阳473000)
摘要:目前,农村劳动力的匮乏,农业机器人代替工人作业已经成为一大趋势。绝大部分采摘机器人都是以专业的工业PC机为智能控制平台,所占空间大、功耗高且价格十分高昂,使得智能机器人成本太高,推广的阻力很大。为此,以MSP430F149为核心处理器,结合机器视觉理论技术,设计了一套智能监控的采摘机器人控制系统,可以实时处理采集到的图像,指导采摘机器人前进及采摘目标果实。为了实现人机交互工作,设计了LCD显示电路,可以通过其实时了解采摘机器人的工作状态,且极大地降低了制造成本。实验结果表明:该采摘机器人视觉系统识别错误率低至3.72%,提高了采摘机器人的可靠性和采摘效率,具有很好的应用前景。
关键词:采摘机器人;MSP430F149;智能监控;机器视觉;人机交互
0引言
随着智能农业机械方面技术的日益成熟,我国农业生产模式发生了很大的变化,现代科学技术手段和生产工具在农业种植生产模式上的运用逐渐深入,促使我国实现精准化农业,发展农业经济。智能控制和信息处理技术的快速发展,使得研究人员开始重视农业机器人的研究,使其在农业生产各个领域的应用更加普遍。在水果种植产业中,水果果实的收获作业相对复杂和繁琐,劳动力的消耗较大,且果实采摘质量的好坏很大程度影响农户的经济收入。在我国,人口老龄化和劳动力的短缺,使得采摘成本较高,且在采摘过程中工人人身会存在安全隐患,因此农业机器人的需求非常急迫。MSP430F149单片机是一款16位超低功耗的混合信号处理器,内部集成了大量模拟和数字电路,外围电路少,可以提供极其精简的嵌入式系统方案。为此,设计了基于MSP430F149处理器的智能机器人视觉系统,可实现水果自动化采摘作业。MSP430F149单片机核心开发板和智能监控的采摘机器人如图1所示。
1视觉系统总体设计
机器视觉技术的功能相当于动物的眼睛,使没有视觉的机器人能通过摄影机和传感器做出正确的测量和判断。该系统通过CCD相机可以获取丰富的数据信息,MCU会快速处理。因此,在现代自动化技术高速发展的社会中,该技术已经广泛的用于质量分级、产品质检、工况监测和植物生长参数检测等多个领域。机器视觉工作示意如图2所示。

图1 MSP430F149核心开发板和智能机器人

图2 机器视觉工作示意图
机器视觉结合先进的自动化控制技术和电子信息技术于一体,主要包括卤素灯光源、光学器件(棱镜、偏光片、镜头、反射器、分光器、漫射片、滤光片)、CCD相机、图像采集系统、图像处理软件及智能控制系统等部分。视觉系统总体构建如图3所示。

图3 智控采摘机器人视觉系统总体架构
机器视觉系统将摄像机拍摄的图片转化为图像信号,交给图像处理系统,获得物体果实的状态信息,并依照图像信号像素分布和色彩,处理成数字信号;MSP430F149处理器将数字信号采用各类精确运算获知果实物体的特征及三维坐标,并通过判定结果去驱动控制各执行机构。
2目标果实的分割识别
在环境复杂的果林中,机器人想要成功采摘目标果实,最重要的一步是精准地识别目标果实,机器视觉的颜色空间模型算法和图像处理决定了目标果实的准确分割识别。双目摄影机拍摄果实的颜色图像和空间图像,图像处理系统根据果实表皮的颜色、形态特征和距离信息确定。
颜色模型指空间颜色坐标的某个能够看得到的光子集合,是所有颜色域的集合,如图4所示。RGB就是空间直角坐标系颜色系统的一个单位立方体,控制系统可以统计果实颜色的深度层次进行数据信息储存,以便图形处理系统确定果实成熟度。

图4 RGB颜色模型
该机器人系统利用图形处理软件,采用几何推导法计算出色调、饱和度、亮度,从而推算识别出目标果实及其成熟度。则有

(1)
(2)
(3)
(4)
其中,H为颜色色调;S为颜色饱和度;I为颜色明度。根据3个值的计算及采用面积加权直方图算法,通过判断果皮颜色,进而根据水果各个时期的颜色对比,就可以判断水果是否符合采摘要求。
3控制系统硬件设计
智控采摘机器人需要对采集系统快速处理,以高效敏捷地驱动机器人前行,控制机械手去完成采摘作业。针对这些因素,设计了以MSP430F149为核心控制系统硬件平台,可完成实时采集信息、处理信息、机器人在现场的自动控制和采摘状态的实时显示。该控制系统硬件电路主要包括MSP430F149最小系统、伺服电机驱动、12864显示及按键输入等电子电路。
3.1 MSP430F149最小系统电路
MSP430F149单片机最小系统是用很简单的元器件组成一个核心处理器可以正常运行的基本电路,主要包括MCU、振荡电路和复位电路。其中,振荡电路包括8MHz和 32kHz两种振荡模式,处理器可以根据外围器件的需要选择合适的时钟频率。其电路原理图如图5所示。
3.2 12864液晶显示电路
12864是一个图形点阵显示器,共有128×64个点阵,可以完成图形显示,最多能显示32个汉字,直流5V供电。此系统作为最简单的显示功能,主要用来指示采摘机器人当前工作状态及电池剩余电量,是人机交互的一个窗口。其电路原理图如图6所示。
3.3 伺服电机驱动电路
伺服电机主要有扭矩、速度、位置3种控制模式。其中,扭矩形式是通过外部模拟量的输入来设定电机轴对外的转矩大小,当外部模拟量设定为大于预设值时电机正转,反之则反转;速度形式是通过模拟量的输入或者脉冲的频率来进行转动速度的控制,进行速度模式控制时需要给上位反馈电机的位置信号以做运算用。该采摘机器人需要几种模式的共同切换控制,来完成机器人的前进及后退、抓取等机械动作。伺服电机电路如图7所示。

图5 MSP430F149最小系统原理图

图6 12864液晶显示原理图

图7 伺服电机电路图
3.4 系统电源电路
智能采摘机器人采用5V/5A的锂电池供电,电池5V输入电压经过DC-DC转换器可以实现5V到3.3V和5V到1.8V的转换。嵌入式系统MSP430F149处理器供电电压是3.3V,因外围电路对处理芯片干扰大,故 DC-DC模块需加滤波电容减小纹波。MSP430嵌入式模块需要长期供电,当外部断电时需要采用电池来给其供电。系统电源电路如图8所示。

图8 系统电源电路
嵌入式系统电源电路设计实现的方法有很多种,而电源的很多指标是不可能同时兼顾的,往往需要在效率、噪声性能、纹波、成本等方面进行折中考虑。处于对成本、效率的的考虑 ,整个系统电源电路采用两个标准三端线性稳压器进行DC-DC转换:一路采用LM1117-33将5V降至3.3V,一路采用LM1117-18将5V降至1.8V。
4控制系统软件设计
智控采摘机器人控制系统软件设计主要考虑机械控制驱动的精确性和系统运行的可靠性,采用IAR Embedded Workbench为开发平台。IAR Embedded Workbench为开发不同的MSP430目标处理器项目提供强有力的开发环境,并为每一种目标处理器提供工具选择,为开发和管理MSP430嵌入式应用程序提供了极大便利。该系统软件包括Main主程序和图片处理、伺服电机驱动、传感器采集及LED显示等子程序。系统通过调用各个子程序,控制驱动机器人整体的正常运转,并根据信息反馈实时修改控制指令。智控采摘机器人控制系统软件流程图如图9所示。
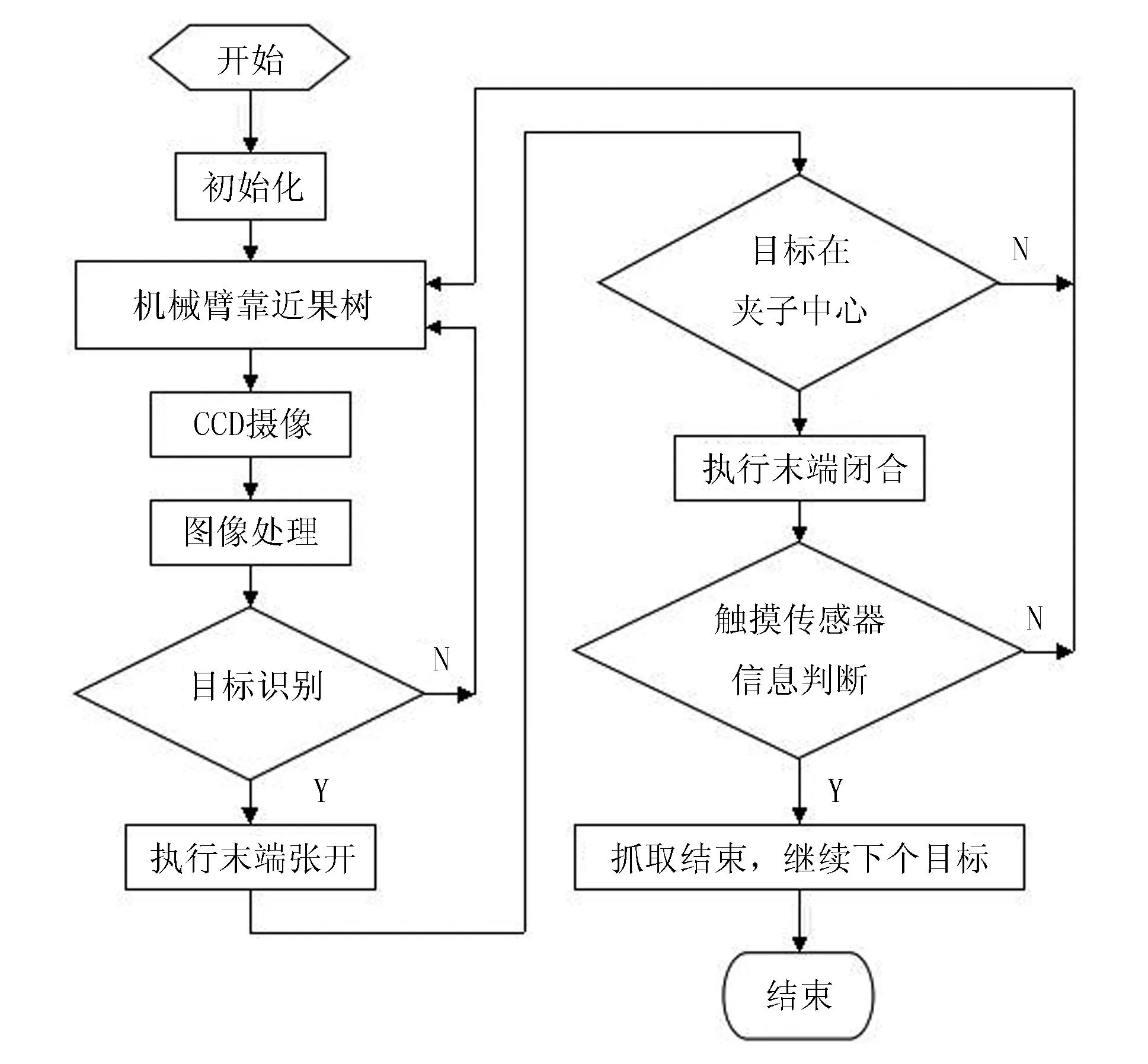
图9 控制系统软件流程示意图
5实验结果与分析
为了验证该视觉系统的可靠性,在苹果林对该系统进行了分割识别实验。实验分别在晴天和阴天进行,并以摄像图离目标物小于250cm和大于250cm拍摄50幅图片,然后通过图像处理软件进行识别。实验识别结果如表1所示。
由表1可见:在整个识别实验中,阴天由于光线不强烈,该机器人系统识别正确率较高;摄像机离目标物的距离小于250cm识别正确率也很高,表明机器人系统识别正确率与环境状况和测试举例有关。经分析可知,此机器人最低识别率为89.47%,识别正确率较高,可靠性强,符合设计要求。

表1 目标识别结果
6结论
以MSP430F149处理器为核心搭建了水果目标识别系统,采用模块分类设计法,运用颜色模型对比方式,可以依照园林环境采用合适的方式进行识别作业,系统移植性能强,图像信息处理速度快,识别正确率高。该智能识别系统对于农业采摘机器人快速识别目标并进行正确采摘作业具有很大帮助,同时还可以大幅度提高采摘效率,对实现果实采摘无人化具有十分重要的意义。
参考文献:
[1]郑峥.基于电光采样的THz-TDS中快速探测技术研究[D].天津:天津大学,2009.
[2]汪嵩杰.基于运动控制器的数控服装裁剪机控制系统设计[D].杭州:浙江理工大学,2010.
[3]付宗国,王丽.基于ATmega32的遥控采摘机器人设计[J].电子设计工程,2012(4):151-154.
[4]顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012(6):153-160.
[5]沈芳,张茂青,严震宇,等.基于DSP和VC++的PMSM上位机控制系统的设计[J].苏州大学学报:工科版,2012(3):45-50.
[6]吕继东,赵德安,姬伟,等.苹果采摘机器人对振荡果实的快速定位采摘方法[J].农业工程学报,2012(13):48-53.
[7]朱亚兵.XF-1495动平衡热压专机控制系统的研制[D].武汉:华中科技大学,2008.
[8]李占坤.果树采摘机器人控制系统研究与设计[D].镇江:江苏大学,2010.
[9]方建军.移动式采摘机器人研究现状与进展[J].农业工程学报,2004(2):273-278.
[10]张业明.基于PLC的胶辊缠绕包覆生产线自动控制系统研究与开发[D].淄博:山东理工大学,2007.
[11]张玉涛.汽车角度位置传感器总成测试台研制[D]. 哈尔滨:哈尔滨工业大学,2013.
[12]戴琨.基于PLC的数控滚压成型机控制系统研究[D].秦皇岛:燕山大学,2012.
[13]蒋公芹.基于轨道车门的面轮廓度自动检测装置的设计[D].南京:南京航空航天大学,2009.
[14]张斐.一种变距计量光栅刻划的分度定位控制系统研究[D].长春:长春理工大学,2011.
[15]宋健.基于图像的采摘机器人模糊视觉伺服系统研究[J].机床与液压,2010(10):65-67.
[16]李占坤,赵德安,姬伟,等.基于工业PC机的果树采摘机器人控制系统设计[J].机械设计与制造,2010(6):142-144.
[17]孟海斌,张红雨.嵌入式系统电源芯片选型与应用[J].单片机与嵌入式系统应用,2010(12):7-10.
[18]王丽丽,郭艳玲,王迪,等.果蔬采摘机器人研究综述[J].林业机械与木工设备,2009(1):10-11,14.
[19]宋健,孙学岩,张铁中,等.开放式茄子采摘机器人设计与试验[J].农业机械学报,2009(1):143-147.
[20]杨军艳,刘明.伺服系统在FA1141A型成卷机中的应用[J].山东纺织科技,2009(5):42-44.
[21]胡佳丽,闫宝瑞,张安震,等.S7-200 PLC在伺服电机位置控制中的应用[J].自动化仪表,2009(12):38-41.
[22]戚利勇.黄瓜采摘机器人视觉关键技术及系统研究[D].杭州:浙江工业大学,2011.
[23]顾宝兴.智能移动式水果采摘机器人系统的研究[D].南京:南京农业大学,2012.
[24]高鹏.六自由度果蔬采摘机器人离线编程系统设计[D].杭州:浙江理工大学,2013.
[25]宋健,孙学岩,张铁中,等.开放式茄子采摘机器人设计与试验[J].农业机械学报,2009,40(1):143-147.
[26]番茄采摘机器人末端执行器的硬件设计[J]. 农业机械学报, 2008, 39(3): 109-112.
[27]蒋焕煜,彭永石,申川,等.基于双目立体视觉技术的成熟番茄识别与定位[J].农业工程学报.2008,24(8):279-283.
[28]谢志勇,张铁中.基于 RGB 彩色模型的草莓图像色调分割算法[J].中国农业大学学报,2006,11(1): 84-86.
[29]赵鹏,赵德安.双目立体视觉在果树采摘机器人中的应用[J].农机化研究,2009,31(1):212-214.
Design for Apple-picking Robot Based on MSP430F149 Intelligent Monitoring
Xuan Feng, Zhu Qingzhi, Zhang Yi
(Henan Polytechnic Institute, Nanyang 473000, China)
Abstract:At present, as the lack of rural labor,it has become a major trend that agricultural robots are used to be instead of workers. The vast majority of picking robots is a professional industrial PC intelligent control platform, which has a large space, high power consumption,high price and cost, the resistance to agricultural extension. This paper takes MSP430F149 as the core processor, combined with the theory of machine vision technology, it designs a set of intelligent control system for picking robot, which can process the collected images in real time, and guide the picking robot to advance and pick the fruits. In order to realize the work of human computer interaction, the LCD display circuit is designed, and the working state of the picking robot can be understood through its use, and the manufacturing cost is greatly reduced. The experimental results show that the recognition error rate of the robot vision system is low to 3.72%, which improves the reliability and efficiency of picking robot.
Key words:picking robot; MSP430F149; intelligent monitoring; machine vision; human computer interaction
中图分类号:S225.93;TP273
文献标识码:A
文章编号:1003-188X(2016)09-0234-05
作者简介:宣峰(1981-),男,河南南阳人,讲师,硕士。通讯作者:朱清智(1980-),男,河南南阳人,讲师,硕士,(E-mail)xuanfeng1981@qq.com。
基金项目:河南省高校重点科研项目(15B535002);河南省高校重点科研项目(14B510011)
收稿日期:2015-08-09
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
科技创新导报(2016年23期)2016-12-23
科教导刊(2016年25期)2016-11-15
计算机教育(2016年7期)2016-11-10
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年10期)2016-06-16
企业导报(2016年10期)2016-06-04
物联网技术(2015年9期)2015-09-22
