
基于三维视景的列车运行仿真平台的研究与实现
2016-04-06 08:28王怀松陈荣武
系统仿真技术 2016年4期
王怀松, 陈荣武
(西南交通大学 信息科学与技术学院,成都 611756)
基于三维视景的列车运行仿真平台的研究与实现
王怀松, 陈荣武
(西南交通大学 信息科学与技术学院,成都 611756)
近年来,视景仿真技术已经被广泛应用到轨道交通领域,但主要还局限于对列车基本驾驶功能的模拟。提出了一种将视景仿真技术与列车运行控制系统结合的研究方法,分析了视景仿真系统与列控系统各自的结构与功能,以ATS、ATP、ATO等列控子系统为例,详细介绍了视景仿真系统与列车运行控制系统相结合的原理方法及其实现过程。测试结果表明,视景仿真系统与列控系统具有良好的实时控制性与稳定性,数据通信延时小于0.05秒,能够较好地用于列控子系统的研究与测试。
视景仿真; 列控系统; ATS
1 引 言
列车运行视景仿真技术是虚拟现实技术在轨道交通领域的具体应用,该技术目前已被广泛应用到列车驾驶员培训系统和列车运营三维演示系统中,而本文在此基础上将列车运行视景仿真技术与列车运行控制系统相结合,用列车运行三维视景系统(以下简称视景系统)模拟室外列车运行的客观环境,通过搭建一个综合型的列车运行仿真平台实现列车运行三维环境与列控系统的实时信息交互。该平台主要用于研究或测试各个列控子系统的系统功能。此外,不论是新线的试运营还是旧线的改造,也可以通过该仿真平台观察预期效果,从而在一定程度上避免了去现场测试所花费的人力、物力、财力,具有安全性和经济性的特点。
本平台的列控系统采用ATC(Automatic Train Control),视景系统中的线路以郑州地铁1号线为原型进行设计。ATC系统主要由三部分构成:列车超速防护系统ATP (Automatic Train Protection)、列车自动驾驶系统ATO(Automatic Train Operation)和列车自动监控系统ATS(Automatic Train Supervision)。列控系统通过接口服务器和视景系统数据中转服务器与视景系统进行数据通信。视景系统中的每一个列车客户端可以在一台PC机上由人工控制或在ATO系统控制下自动运行。列车运行仿真平台的系统结构如图1所示。

图 1 列车运行仿真平台系统结构图Fig.1 System structure diagram of train operation simulation platform
2 视景系统的结构与功能
视景系统主要是利用三维建模技术、虚拟现实技术构建基于真实线路的列车运行客观环境,同时结合列车运行控制系统,对真实的列车走行过程、驾驶员的控制操作过程进行仿真或演示[1]。本平台视景系统主要分为两大部分:列车运行三维驱动部分和通信部分。其中,三维驱动部分可以分为三维视景和列车控制。“三维视景”是指经过三维建模所建立的列车运行三维模拟环境,本视景系统以郑州地铁1号线为原型进行三维建模;“列车控制”是指利用所开发的列车引擎驱动来模拟列车驾驶的各种操作,如牵引、制动、惰行等。三维视景与列车控制共同模拟了现场真实的列车运行场景。通信部分由内部通信和外部通信两部分构成。由于在同一线路中可能会出现多列列车在不同地点同时运行或者在同一地点进行交汇的场景,因此,在仿真系统中每列列车作为一个终端客户端需要把本列车在线路中的信息(主要是列车位置等信息)输入视景系统中,这样视景系统就可以在同一线路中根据实际情况显示出全线所有列车的三维运行场景,而这个过程的数据传送主要通过内部通信完成。
视景系统的外部通信是指视景系统与外部列控系统之间的数据交换,用于模拟现实中的车地双向通信。列控系统根据两列车之间的距离及进路条件,经过计算后给出容许的运行速度,最终实现对视景系统中所有列车客户端的自动控制[2]。整个视景系统的结构如图2所示。

图2 视景系统的结构示意图Fig.2 Schematic diagram of the structure of the visual system
3 ATS系统与视景系统的结合
ATS自动监控子系统(ATS,Automatic Train Supervision)是城市轨道交通列车自动控制系统(ATC,Automatic Train Control)的一个重要组成部分[3]。在本平台上,ATS系统的主要功能是监视视景系统中全线列车的位置、运行速度及信号设备的状态,同时还要为系统提供自动调度和时刻表调整等主要功能。
视景系统模拟的是室外列车运行情况,而ATS系统是对视景系统中的列车与线路进行监控,因此,ATS系统在最初设计线路时,其线路数据和信号设备位置要与视景系统保持一一对应,以保证两个系统之间的实时性和同步性。
ATS系统与视景系统相结合后,每一台装有该视景仿真系统的PC机均可以作为一个客户端接入ATS系统,ATS系统根据视景系统客户端发送的列车车次号以区分不同的列车,从而,在ATS系统界面就可以对全线所有的列车运行状态和信号设备状态进行监控。
3.1 视景系统数据中转服务器与列控系统接口服务器
视景系统数据中转服务器有两个作用,一是转发由视景系统发送到列控系统的列车速度、位置等列车信息;二是转发由列控系统下发到视景系统的列车控制命令或进路控制命令。为保证系统的实时性,数据中转服务器在收到数据信息时需要“立即”自动转发到另一方,这就要求在数据传送时将通信延时控制在一定误差之内,本系统延时误差不超过0.05秒。
为便于后续接入ATO、ATP等其他列控子系统,兼顾数据信息的集中管理,本平台将列控系统接口服务器单独设置在整个列控系统之外,而没有将其设置于某一列控子系统内部。列控系统通过接口服务器可以向视景系统中的所有客户端集中下发控制命令,也可以选择性地向视景系统中某些客户端下发命令。同时,列控系统接口服务器也用于向列控子系统转发来自视景系统的数据信息。
3.2 ATS对视景系统中列车的监视与追踪功能
ATS列车自动监控系统具有对在线所有运行列车的实时监视和跟踪功能[4],该功能经过与视景系统的有机结合,用视景系统模拟室外真实的列车运行场景,可以更好的对ATS系统功能进行研究或测试。
视景系统铁路线路的每一个位置可以由x、y两个坐标唯一确定,而这些线路位置数据信息被事先保存在线路位置数据库中,数据库中的位置数据格式如表1所示。其中,“station”代表车站序号,“pathOrder” 表示“station”对应车站后面的第几个位置点,每个位置点对应一组x、y坐标。两个车站之间位置点的个数根据两站之间实际距离不同而不同,一般两站距离越大,相应设置的位置点也越多。视景系统中的列车客户端在连入ATS系统时首先向ATS系统发送该列车的列车车次号信息,然后在其运行过程中实时地将其读到的位置坐标信息经过格式转换后发送至ATS系统,ATS系统根据接收到的数据信息同步刷新本界面模拟列车的列车位置,实现ATS系统对本管辖范围内列车的自动追踪功能。
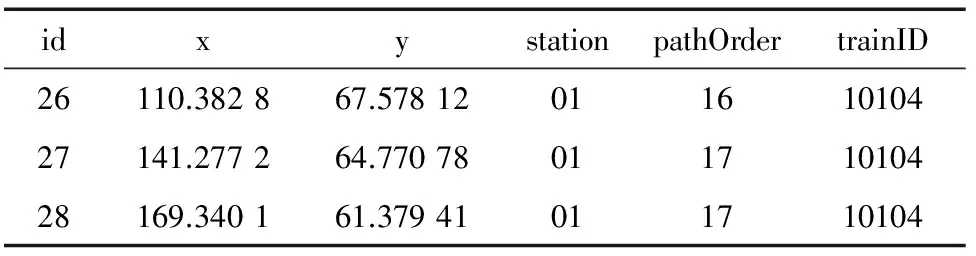
表1 视景系统列车位置信息在数据库中的存放格式
3.3 ATS信号控制功能在视景系统中的实现
ATS系统的信号控制功能主要体现在对道岔、信号机以及进路的控制上。视景系统中的每一个道岔或信号机都有自己的ID编号,ATS系统通过列车识别信息和列车所处的轨道区段,自动生成前方道岔区段的进路控制指令并发送至视景系统中。每一个进路控制命令由“信号控制类型”“信号设备ID号”“目的转换状态”三部分构成。视景系统收到进路控制命令后,通过程序控制道岔和信号机三维模型动作并转换到相应目的状态。例如,在排列好S0107到Z0101进路前后,ATS系统与视景系统界面中信号机S0107的变化如图3、图4所示。
4 其它列控子系统与视景系统的结合
其它列控子系统主要包括ATP系统和ATO系统。ATP、ATO以及TOD司机驾驶台显示系统接入视景系统的方式类似于ATS系统,均是通过列控系统接口服务器连入,而ATP、ATO以及TOD与视景系统的通信需要由列控系统接口服务器和视景系统数据中转服务器共同完成。

图3 排列进路前,ATS系统信号机S0107(上)和视景系统信号机S0107(下)Fig.3 Before change,ATS signal S0107 (above) and the visual system signal S0107 (below)

图4 排列进路后,ATS系统信号机S0107(上)和视景系统信号机S0107(下)Fig.4 After change,ATS signal S0107 (above) and the visual system signal S0107 (below)
本平台上,ATP的主要功能包括:超速防护、行车间隔保护、车门及屏蔽门监测以及向TOD提供显示信息等。在列车运行时,ATP系统根据当前列车速度情况和线路状况实时计算出安全距离与允许速度,如果视景系统中的某个客户端列车不满足ATP防护下的安全距离或允许速度时,ATP系统将自动生成制动命令并发送至视景系统,进而触发视景系统根据CBTC(Communication Based Train Control)安全制动模型对该列车进行制动[]。此外,ATP系统将在全程监测车门及屏蔽门的打开或关闭条件,只有当条件满足时,ATP才授权ATO对车门及屏蔽门进行操作控制。同时,ATP还负责向TOD显示界面提供列车当前速度、目标速度、目标距离、运行方向、前方车站等显示信息。
在ATP系统的基础上安装ATO系统,可以使列车实现由手动方式驾驶向自动方式驾驶的转换。在选择自动驾驶时,视景系统的客户端列车诸如列车启动加速、匀速惰行、制动等人为驾驶操作均能在程序控制下自动进行。但是,无论是由驾驶员手动驾驶还是由ATO系统自动驾驶,ATP系统始终具有执行速度监督和超速防护的功能。本平台ATO的自动驾驶闭环控制系统如图5所示。

图5 ATO的自动驾驶闭环控制系统示意图Fig.5 Schematic diagram of the automatic control system of ATO
5 仿真平台的搭建与测试
本平台硬件部分主要包括:6台PC机(i7处理器,8G RAM,2G显存)、9台1920*1080分辨率的显示器;软件部分主要包括:视景仿真系统软件、ATS系统、ATO系统、ATP系统以及TOD显示系统,Visual Studio 2013、.Net Framework 3.1,操作系统为Windows7(64bit)。系统平台上,如图 6所示,将其中4台显示器利用分屏卡组合成ATS监控大屏,对应使用一台安装有ATS系统的PC机。本平台设置4个列车客户端,每个客户端对应一台安装有视景系统的PC机,4个列车客户端通过局域网接入列控系统。最后,再利用一台显示器显示TOD界面,TOD显示系统能够切换到任意一个列车客户端。测试过程中以郑州地铁1号线为线路背景,主要从列控系统的系统功能、列控系统与视景系统的同步性和数据交互的实时性、视景系统图像输出的流畅性等方面进行测试,测试结果表明:本平台能够模拟列控系统对室外在线列车的主要控制功能,且视景系统图像输出流畅,数据通信延时小于0.05秒,具有良好的实时控制性与稳定性,能够较好地用于列控子系统的研究与测试。

图6 列车运行仿真平台硬件、软件结构图Fig.6 Hardware and software structure diagram of train operation simulation platform
6 结束语
本文首先介绍了基于三维视景的列车运行仿真平台的系统结构,然后分析了视景系统的结构与功能,以ATS、ATP、ATO等列控子系统为例,详细介绍了本平台上列控子系统与视景系统相结合的原理方法及数据通信方式,最终在仿真平台上成功测试了ATS、ATP、ATO以及TOD系统的系统功能,测试结果表明,将列车运行视景仿真技术与列车运行控制系统相结合的研究方法
是一种具有真实性、扩展性、无破坏性和可重复性的测试或试验方法,对今后列控系统的研究与测试具有一定启示意义。
[1] 车爽.基于列车运行控制的城市轨道交通视景仿真[D].成都:西南交通大学,2015.
CHE Shuang.Visual Simulation of Urban Metro Transit Based on Train Operation Control[D].Chengdu:Southwest Jiao Tong University,2015.
[2] 董昱.区间信号与列车运行控制系统[M].北京:中国铁道出版社,2008.
DONG Yu.Interval signal and train control system [M].Beijing: China Railway Press, 2008.
[3] 陈荣武.城市轨道交通控制[M].北京:科学出版社,2014.
CHEN Rongwu.City rail traffic control [M].Beijing: Science Press, 2014.
[4] 刘洪宽.城市轨道交通ATS关键技术及仿真平台研究[D].成都:西南交通大学,2008.
LIU Hongkuan.Research on ATS crucial technologies and its simulation platform on the urban track traffic[D].Chengdu:Southwest Jiao Tong University,2008.
[5] 陈荣武.CBTC系统列车运行仿真与优化策略[D].成都:西南交通大学,2011.
CHEN Rongwu.CBTC system simulation and the optimization strategy[D].Chengdu:Southwest Jiao Tong University,2011.
王怀松 男(1988-),四川眉山人,硕士研究生,主要研究方向为交通信息工程及控制。

陈荣武 男(1971-),高级工程师,主要研究领域为交通信息工程及控制、计算机应用。
Research and Implementation of Train Operation SimulationPlatform Based on 3D View Scene
WANGHuaisong,CHENRongwu
(School of Information Science and Technology,SouthwestJiaotong University,Chengdu 611756,China)
Although it has been widely applied to rail transport systems in recent years,the technology of visual simulation is limited to the basic driving functions of trains.After analyzing their structures and functions respectively,this paper proposed a novel approach to combine visual simulation with the train operation control system.Taking the control of ATS,ATP,and ATO subsystems as examples,we introduce the fundamental principle and implementation process of this combination in detail.The test results show that the visual simulation system and the train control system have good real-time control and stability,the data communication delay is less than 0.05 s,which can be applied to the research and test of the train control subsystem.
visual simulation; train operation control system; ATS
四川省科技支撑计划项目(14ZC2069,2014GZ0081)
TP391.9
A
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2016年10期)2016-06-01
铁道通信信号(2016年8期)2016-06-01
中国铁道科学(2015年6期)2015-06-21
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
