
四相调制单通道单脉冲跟踪接收机设计
2016-04-09 02:03中国电子科技集团公司第54研究所
电子世界 2016年5期
关键词:Matlab仿真
中国电子科技集团公司第54研究所 赵 楠
四相调制单通道单脉冲跟踪接收机设计
中国电子科技集团公司第54研究所 赵 楠
【摘要】在卫星通信中,卫星天线经常移动,并希望在移动的同时始终使天线对准卫星,达到最佳通信效果,自跟踪接收系统的作用就在于此。本文设计的跟踪接收机是自跟踪系统的重要组成部分,文中介绍了四相调制单通道单脉冲跟踪接收机的工作原理和系统组成,对中频数字信号处理算法中的关键参数进行了Matlab仿真,并在工程中实现,最后经过对星测试验证了设计的正确性。
【关键词】四相调制;单通道单脉冲;Matlab仿真
0 引言
单通道单脉冲(Single ChannelMonopu lse,简称SCM)技术体制的最突出优点是节省信道,有利降低成本,其次是设备操作简化,有利于提高可靠性,这就使得SCM跟踪技术在卫星地球站、遥感、气象接收站的自跟踪系统中也得到应用。
本文设计的四相调制单通道单脉冲跟踪接收机,在传统SCM接收机的基础上,通过用低频信号对对差通道信号进行四相调制,实现了对BPSK、QPSK等调制信号的跟踪。
1 工作原理


差信号经过四相调制后,可写为:

其中调制信号为:

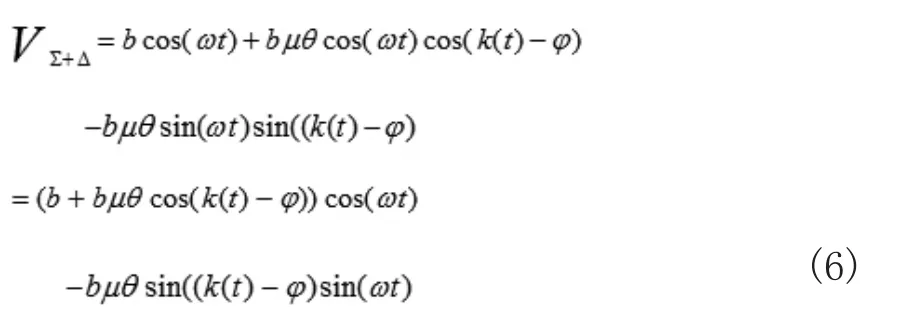
相加后的和与差信号为:

合并后的信号经过变换得:
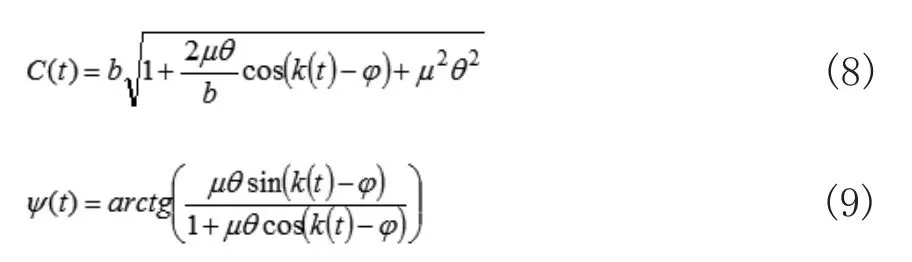
和差信号经过下变频后到70MHz中频,经过AFC消除多普勒影响和AGC归一化处理后,对和差信号进行包络检波,和差信号可以表示为:

式中:
当时,,
由此得到:

滤除直流分量后的信号为:
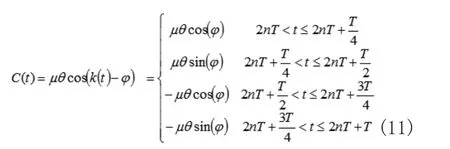
对此信号进行同步解调提取方位误差和俯仰误差。由于是四相调制,需要两次同步解调。 第一次同步解调分离出交流方位误差信号和俯仰误差信号,第二次解调则得到直流方位、俯仰误差电压。
可得出方位电压差为:

俯仰电压差为:

2 系统组成
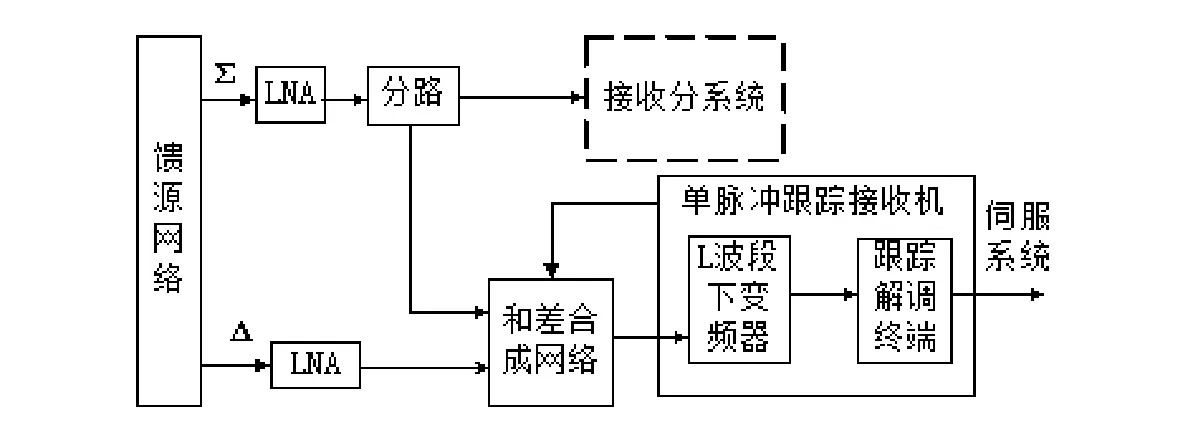
图1 跟踪接收系统组成框图
跟踪接收单元由下行数据传输信道和跟踪通道,主要由和差LNA、分路器、和差(单通道)合成网络、单脉冲跟踪接收机(包括L 波段下变频器、跟踪解调终端)组成。
工作时,需要一路数据通道和一路跟踪通道,和信号经过切换开关进行极化选择之后在进入LNA,放大后的信号进入分路器,其中一路和信号最终送给接收分系统(或者由和差合成网络功分),另一路和经过极化选择的差信号一起送给和差合成网络。在和差网络中,差信号由跟踪接收机发出的同步调制信号调制后与和信号合成,送给跟踪接收机。单脉冲跟踪接收机为标准1U机箱,由电源模块、L波段下变频器、中频接收机和监控单元构成。
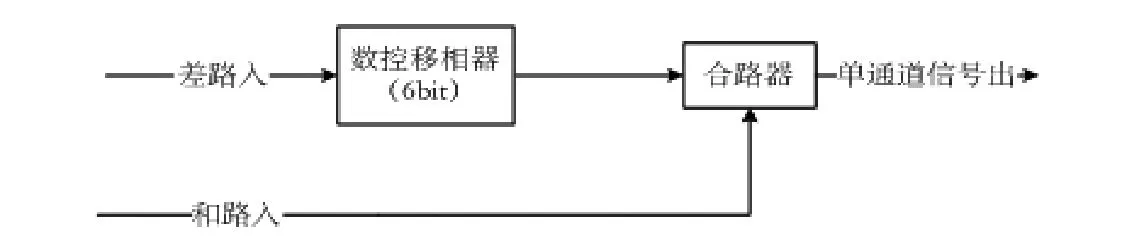
图2 和差合成网络组成框图
和差合成网络的简化组成框图如图2所示,采用6位移相器(5.625°、11.25°、22.5°、45°、90°、180°)实现四相调制,第五位是90°,第六位是180°,通过时间同步的方法,可分别对90°和180°的移相值进行连续控制,以达到最终实现来波相位90°、180°、270°、360°的连续变化,从而实现四相调制。通常的方法是,由终端产生一组频率为Ω和2Ω的低频TTL方波信号,使其组合成复合控制信号,在时间为Ω的周期内,控制6位移相器,在控制信号时间同步的情况下,满足表1-1所示的关系。
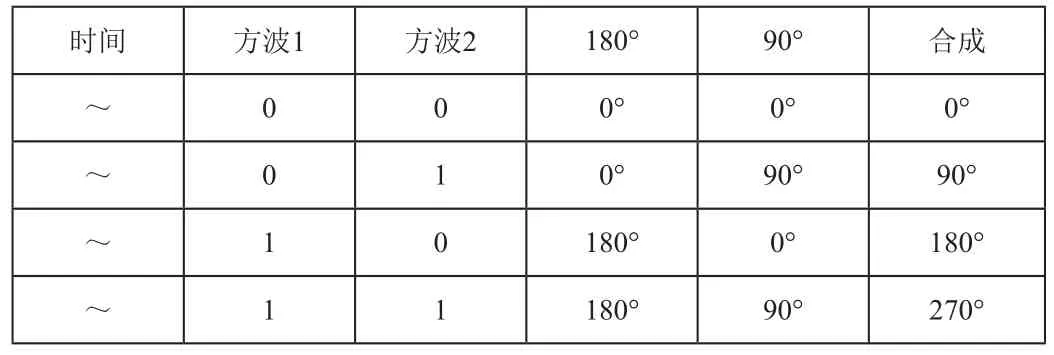
表1-1 时间相位电平关系表
信道设计和频率配置时要考虑增益分配合理、信道频率组合干扰少,L波段下变频器将L波段信号进行两次变频,输出70MHz信号,送跟踪解调终端进行误差信号解调。
跟踪解调终端由中频解算单元和控制单元组成。70MHz中频信号通过AGC控制到恒定电平,并输送至中频解算单元;中频解算单元对中频信号进行A/D转换、角误差解调,并将角误差送至天线控制单元(ACU),ACU控制驱动天线朝着减小误差的方向运动,实现对目标的自动跟踪。控制显示单元实现整个跟踪接收机的控制和对外通信。
3 仿真与实现
中频信号仿真模型是利用Simulink中的数字信号处理模块来设计的,主要包括输入信号生成与采样、数字下变频、频率估计和载波提取、场强解调、信噪比计算、误差信号解调几个部分。仿真框图如图3所示。
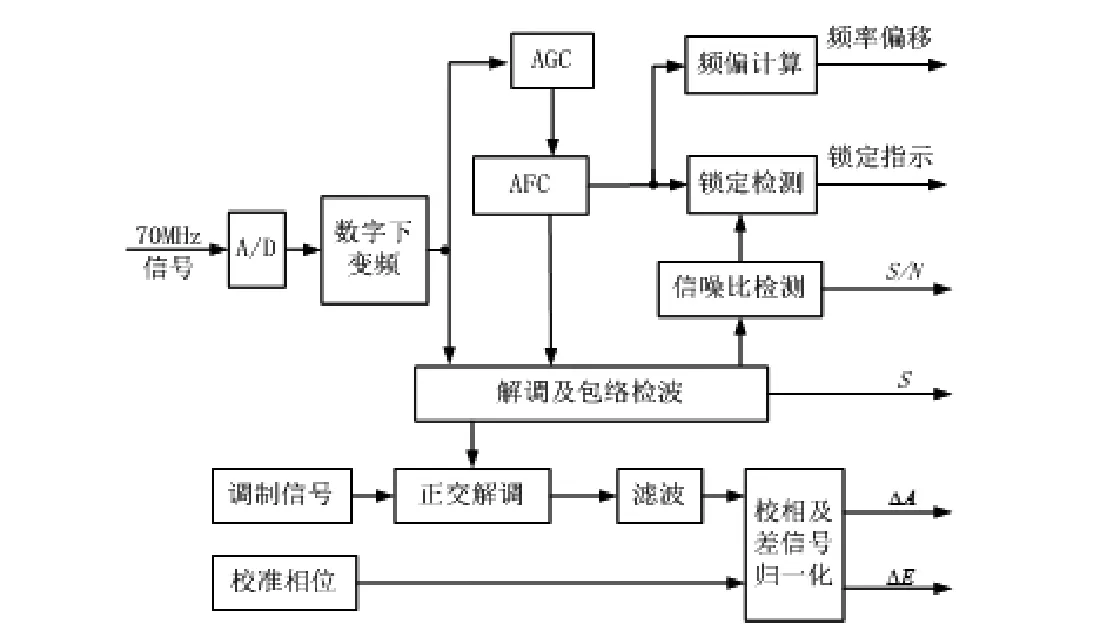
图3 中频信号仿真框图
在信号跟踪中,为了提高信噪比,数字处理单元首先采用AFC环路进行频偏补偿,依靠AFC环路的牵引作用,使NCO输出的本地载波频率不断向输入载波频率靠近并跟踪输入载波频率的变化,从而消除了多普勒频移的影响。多普勒频移消除后,可以通过求两路正交信号的平方和得到和差信号的包络,然后将一路包络通过积分处理作为电平的控制信号,另一路信号滤除高频分量和隔离直流后作为跟踪信号进行误差解调,经过同步解调后,分离出方位误差信号和俯仰误差信号。
由于系统存在随机噪声,入锁时间和误差信号的解调性能都会受到信噪比的影响,因此对在信噪比S/N为6dB下的载波捕获跟踪性能进行分析仿真。如图4所示,从上到下依次为和信号、方位误差信号、俯仰误差信号。从图中可以看出,锁相环的初始捕获后,方位俯仰误差稳定的时间约为30ms,在工程实践中能够满足要求。
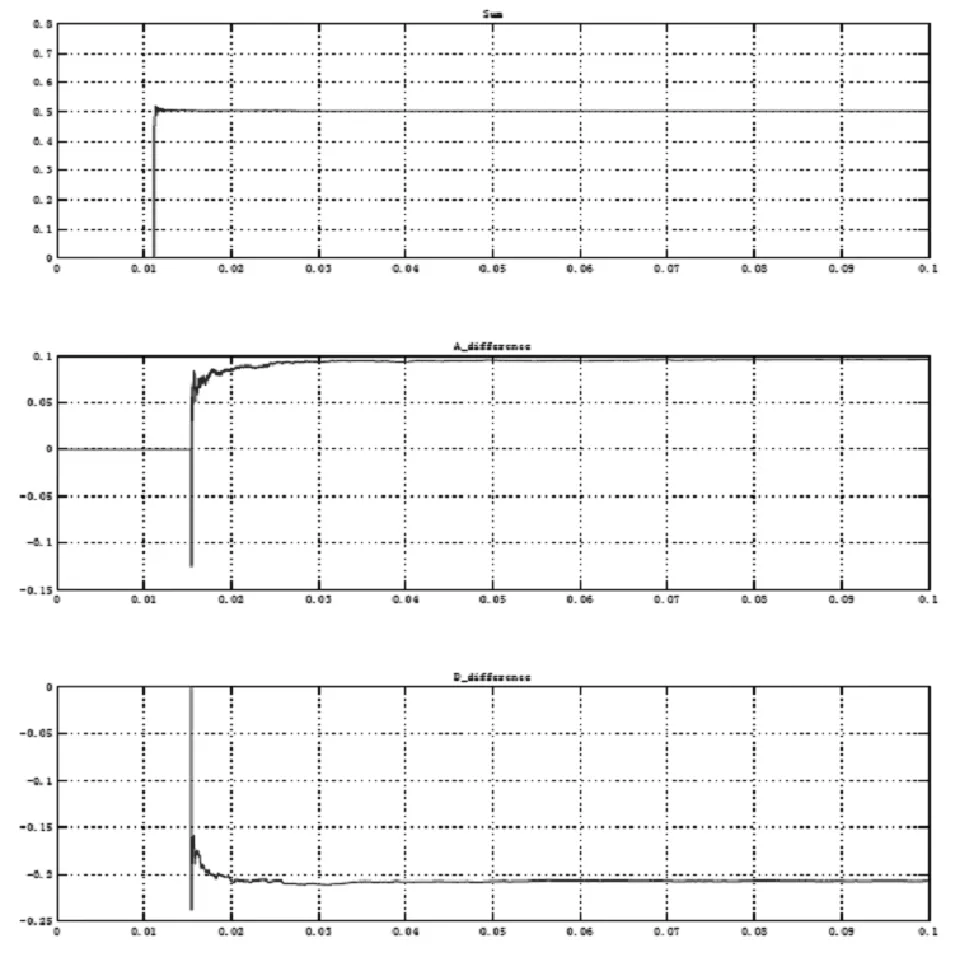
图4 仿真结果
中频解算的数字信号处理主要由FPGA实现,采用Xilinx公司的Virtex-5系列芯片XC4VSX95T,FPGA部分的设计主要包括数字采样与数字下变频设计、频率引导捕获、数字AGC、AFC与跟踪算法设计、同步解调、相位校正等。
在单脉冲跟踪系统中,由于和差通道相对相移,导致差信号与和信号之间存在相位差,而在同步解调中,是以和信号做为参考进行频率相位控制,导致最终解调出的方位俯仰误差存在交叉耦合,需要进行相位校准。通常的相位校准方法是伺服系统找到和信号中心,再分别通过偏方位俯仰轴、设置移相值及斜率最终达到减小交叉耦合,实现自动跟踪。
4 系统测试
为了测试四相调制单通道单脉冲跟踪接收机的实际性能,搭建测试系统,对卫星测试。
如图5所示,将接收机接入天馈伺系统,差信号经调制后进入和路器,与和信号合成,进入跟踪接收单元,跟踪接收单元通过CAN接口和上位机通信,同时通过OLED显示屏可以观察接收机上报状态参数,同时可以通过机箱键盘对参数进行设置。
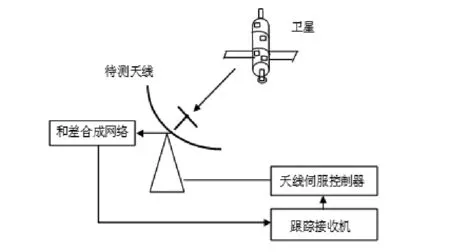
图5 跟踪接收机测试方框图
联试中,分别对E87.5°星的信标信号和E140°星的调制信号进行了对星测试,天线波束宽度约为6°,方位俯仰校相后,分别将天线方位轴、俯仰轴以0.5°为步进拉偏±3°,可以看到方位、俯仰误差值线性变化,交叉耦合小于1/5,能够满足跟踪要求。
5 结束语
本文设计的四相调制单通道单脉冲跟踪接收机,除了能够跟踪单载波的信标信号,还能对BPSK、QPSK调制等恒定包络信号进行跟踪,利用FPGA完成基带数字信号处理,大大提高了跟踪接收机的性能,经实际验证,能够满足工程要求。
参考文献
[1]王秉均,王少勇,田宝玉等.现代卫星通信系统[M].北京:电子工业出版社,2004.
[2]汪晓燕.单通道单脉冲角跟踪系统的研究[J].电讯技术,2005(3).
赵楠(1983—),女,中国电子科技集团公司第54研究所工程师,主要研究方向:数字信号处理。
作者简介:
猜你喜欢
现代情报(2016年11期)2016-12-21
科学与财富(2016年26期)2016-12-01
科技视界(2016年21期)2016-10-17
电脑知识与技术(2016年12期)2016-06-14
电脑知识与技术(2016年9期)2016-05-18
考试周刊(2016年11期)2016-03-17
现代电子技术(2015年17期)2015-09-23
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年10期)2015-05-29
无线互联科技(2015年2期)2015-04-02
