
卫星/伪卫星组合着舰导引中伪卫星的布局方案设计*
2016-04-10 08:00郭慧杰
空间控制技术与应用 2016年3期
王 玮,郭慧杰,孟 跃
(北京航空航天大学仪器科学与光电工程学院,北京100191)
技术交流
卫星/伪卫星组合着舰导引中伪卫星的布局方案设计*
王 玮,郭慧杰,孟 跃
(北京航空航天大学仪器科学与光电工程学院,北京100191)
卫星/伪卫星组合着舰导引系统的定位精度与伪卫星的几何布局有密切关系.为提高系统的定位精度研究伪卫星在航母上的布局问题,根据伪卫星的特点以及航母的构造选定伪卫星的8个可布设点搭建舰载机着舰过程的仿真模型,构造舰载机及航母的航行轨迹,同时在仿真模型中引入舰船运动模型.利用精度因子分析在舰船上布设伪卫星对定位精度的影响,进而提出了伪卫星在航母上的布局方案.结果表明,提出的方案能够减小精度因子,尤其是垂直精度因子,提高了定位精度.
着舰导引;伪卫星;精度因子;布局方案
0 引言
舰载机是航空母舰的主要作战武器,也是其具有强大威慑力的原因所在.舰载机的起飞和降落都是以航母母舰为基地,对于训练有素的舰载机飞行员而言,起飞的难度不大,真正的挑战在着舰环节.
舰载机的着舰是对精度要求非常高的相对导航问题,航母和舰载机运动在不同的介质中运动轨迹完全不同,在着舰瞬间两者的相对速度很大,又要求在指定的方向在指定点进行汇合,导致其难度很大,这就对着舰导引系统的精度提出了很高的要求.
卫星着舰导引系统能够对舰载机和航母的相对位置进行精度极高的测量,而且其具有体积小、全天候、全球性等优点,成为舰载机自动着舰导引系统的一种有效手段[1].然而,卫星系统有其固有的缺点,如对环境的依赖性强、易受干扰、垂直定位精度差等.
伪卫星的功能和原理与导航轨道卫星类似,能发出与轨道卫星相同格式的电文.利用伪卫星对卫星进行辅助定位可以改善定位系统的可靠性和完好性,更加重要的是,伪卫星可以弥补卫星定位在垂向定位精度方面的不足[2-3].同时,通过对伪卫星信号进行加密以及改进接收机跟踪环路的相关器、鉴相器,可以提高加入伪卫星之后的安全性和抑制多径效应.布设在航母上的伪卫星到航母接收机和舰载机接收机的距离很近,所以其几何布局对系统性能的影响很大.为了提高卫星/伪卫星组合着舰导引系统的定位精度,必须对伪卫星在航母上的几何布局进行深入的研究.
国内对伪卫星的研究文献较多,但涉及卫星/伪卫星组合着舰导引的研究较少,对于伪卫星在舰船上的布局更是未见相关文献.文献[4]研究了临近空间伪卫星的布局问题,但未与卫星进行组合.文献[5]设计了伪卫星的布局方案,但没有研究卫星数目与几何精度因子(geometry dilution of precision,GDOP)之间的关系.
区别于现有文献在静态环境当中根据精度因子确定伪卫星几何布局,本文研究了舰载机在着舰这一动态过程中的精度因子变化情况,从而更具有实际意义.本文考虑了航母的航行速度、舰船在海洋中的运动、舰载机的飞行轨迹、速度和位置误差等情况,力求计算结果真实可信.对于卫星/伪卫星组合着舰导引这一前沿领域,提供了一种可参考的伪卫星布局方案.
1 伪卫星可布设位置的选取
图1为尼米兹号航母舰面的结构示意图(图中单位为英尺,1 ft=0.304 8 m),着舰跑道长约200 m,宽约30 m,位于从舰尾到舰艏靠航母左舷一侧,与航母轴线一侧形成一个向外的夹角(9°3').
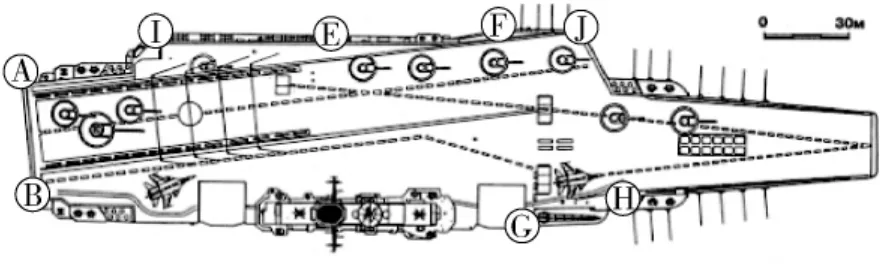
图1 航母舰面结构及尺寸Fig.1 The structure and dimensions of aircraft carrier surface
从跑道后端50 m处开始4根拦阻索以大体相等的间距(约12 m),每根长约36 m,拦阻网装置则设在第3道和第4道拦阻索之间.舰载机理想着舰点位于第2道和第3道拦阻索之间,大约距舰尾70 m.以理论着舰点为中心,以着舰跑道中心线为长轴、过理论着舰点与长轴正交的直线为短轴,长半轴为13 m、短半轴为3 m的椭圆形区域被称为着舰点散布区.
以海面平静时的舰船质心为原点,舰面为XOY平面,Y轴沿航母中心线指向舰首,X轴指向航母右舷,Z轴沿天向垂直于舰面建立直角坐标系,称为舰船参考坐标系,本文所有的计算均在此坐标系中进行.
伪卫星在布设时需要考虑的因素有:1)与接收机之间的距离要求伪卫星与接收机之间的距离不能过近,假如卫星接收机安装在舰岛,那么伪卫星最好分布在舰船的边界上[5];2)信号的干扰及遮挡,要求避开航母上可能带来干扰的电子设备和建筑物[6-7];3)伪卫星之间的距离不宜过近[8].
综合以上因素,选取的伪卫星可布设点坐标如表1所示.
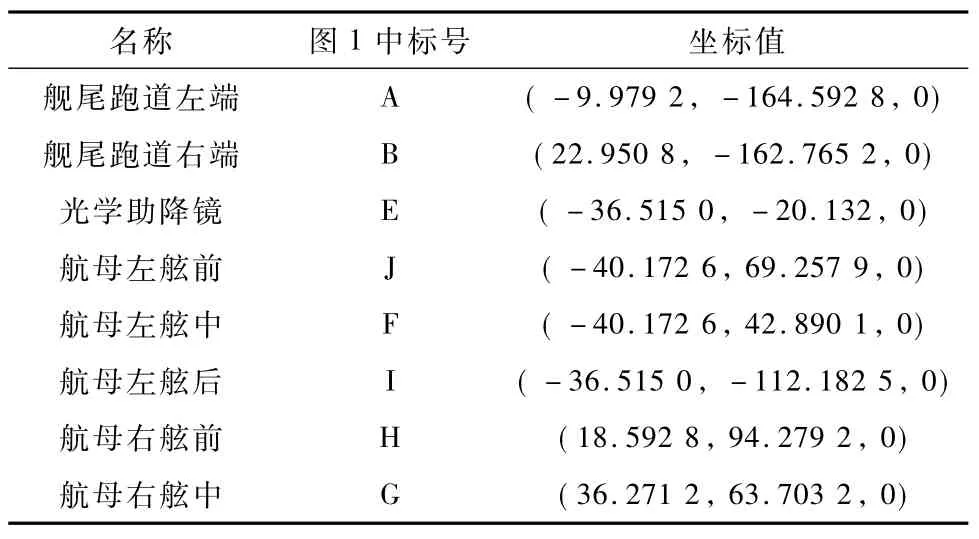
表1 伪卫星可布设点坐标Tab.1 The coordinates of the points where pseudolites can be deployed
2 确定伪卫星布局方案的算法
在卫星/伪卫星组合着舰导引系统中,伪卫星辅助卫星进行定位,以期改善卫星的可靠性、完好性及垂直方向的定位精度,起主导作用的仍然为卫星[9],理论上三颗以上的卫星就能进行定位,但由于受到时钟误差的影响,为了达到较好的定位效果,可用卫星的数目要求达到4颗.本文采用基于卫星仰角和GDOP的卫星选星算法[10]选取航母上方的4颗卫星进行分析,其初始坐标(在舰船参考坐标系中)如表2所示,在舰载机着舰过程中其坐标根据卫星的星历实时更新.
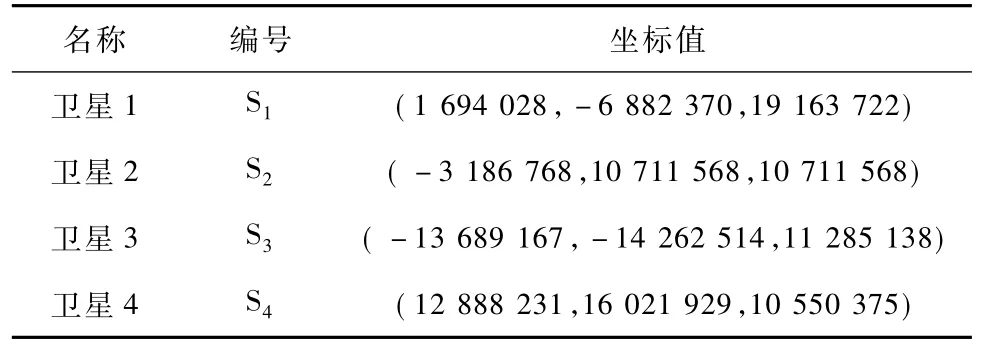
表2 卫星初始坐标Tab.2 Initial coordinates of satellites
在此基础上加入一颗或多颗伪卫星,以研究加入伪卫星之后对定位精度的影响,并最终确定加入伪卫星的数目以及布设位置.
确定伪卫星布局方案的算法如下,以4颗星(卫星或伪卫星)为例,4颗星以上的计算方法以此类推.
设用户的位置矢量的3个分量为x、y、z,卫星或伪卫星的位置矢量为 si(i=1,2,3,4),ei为用户到第i颗卫星距离矢量的单位矢量,其方向余弦为ei1、ei2、ei3,ρi为用户到第 i颗卫星的伪距,则在地球坐标系中确定用户位置的坐标方程可表示为

式中,Ei=[ei1ei2ei3-1](i=1,2,3,4),si=[xsiysizsilsi]T(i=1,2,3,4).
若不考虑导航电文中的星历数据误差和卫星相位误差,用户位置的计算误差 δX、δY、δZ及接收机时钟误差的剩余误差δts与伪距测量误差δpi(i=1,2,3,4)有关,即

式中:cosαi,cosβi,cosγi(i=1,2,3,4)为卫星或伪卫星i与用户之间的距离矢量相对某一坐标系轴向的方向余弦,这一坐标系可选用地球坐标系或地理坐标系;δX;δY、δZ就是沿所选坐标系轴向的位置误差.式(2)说明误差δX、δY、δZ完全决定于伪距测量误差以及4颗星与用户的相对几何位置.其矢量形式可表示为

或

设各测量误差为白噪声δρi,均方差都为σρ,则E(XuXTu)=(HTH)-1σρ2,令
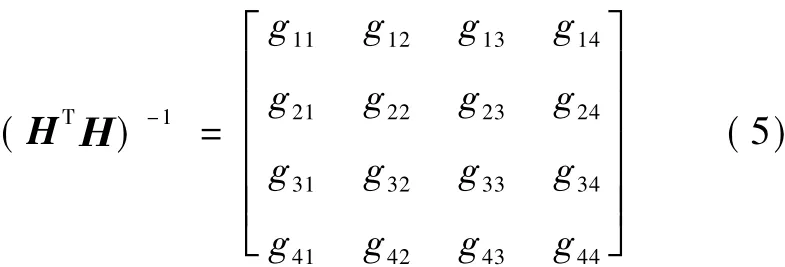
则E(δX2)=g11σρ2,E(δY2)=g22σρ2,E(δZ2)= g33σρ2,E(δts2)=g44σρ2.
用gp表示几何精度因子GDOP,hp表示水平精度因子HDOP,vp表示垂直

则

由式(7)可知:位置误差的均方差σρ是测量噪声均方差的若干倍,这个倍数就是几何精度因子GDOP.
水平精度因子:

垂直精度因子:

3 仿真分析
3.1 仿真平台的搭建
舰载机的着舰过程如图2所示.舰载机在距离航母50~60 km的距离时,进场导引雷达提供无线电信号帮助舰载机调整航向和下滑角,以保证着舰导引雷达能够成功捕获到舰载机.
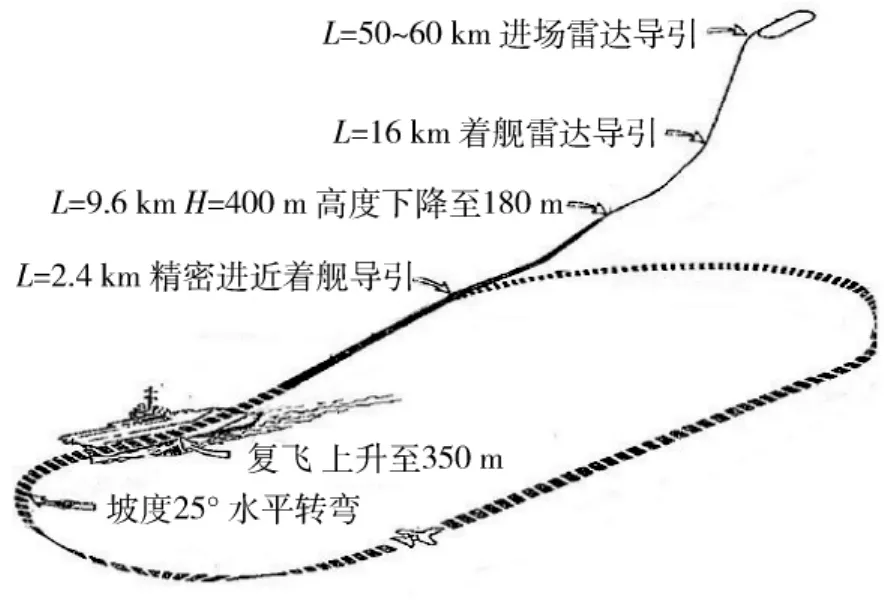
图2 舰载机着舰过程示意图Fig.2 Schematic diagram of carrier aircraft landing process
舰载机进入距离航母15 km左右的空域时,着舰导引雷达捕获到舰载机并提供精确导引信号,将舰载机导引到距离舰尾2.4 km处的下滑道入口,在此过程中,舰载机需按规定调整至240 km/h的着舰速度.之后,舰载机以约-4°的下滑角在卫星/伪卫星组合着舰导引系统的精确导引下,降落在着舰点散布区并钩挂上拦阻索实现成功着舰.
本文中使用的仿真平台则据此进行搭建,模拟舰载机在由卫星/伪卫星组合着舰导引系统导引阶段的运动,计算着舰过程中尤其是即将到达理想着舰点时的精度因子.
设定舰船从北纬40°、东经120°、海拔10 m的位置以30.64 km/h的速度向东航行,飞机从距舰尾2.4 km(高度约160 m)开始,以240 km/h的速度和-4°的下滑角朝航母航行,航行过程中需始终对准跑道中心线.
为了尽可能真实地模拟海上着舰环境,在仿真平台中引入舰船运动模型.当航母在海洋上航行时,会受到海浪的影响而造成甲板位置和姿态的变化,安装在航母上的伪卫星也会随之受到影响,其坐标在横向、纵向、垂向均会发生变化,其中垂直方向的坐标变化尤其明显.
舰船的运动体现为6种:横摇、纵摇、艏摇、横荡、纵荡、沉浮.根据美国海军的研究结果,采用正弦波方程来描述这些运动,由于舰载机的着舰点主要受到横摇、纵摇和沉浮的影响,因此主要考虑以下3种运动模型:


式中:γi、θi、hi分别为横摇角、纵摇角及沉浮高度; γ0、θ0、h0为初始值;ωγ、ωθ、ωh为运动角速度;βγ、βθ、βh为相位偏移.一般来说,航母在海洋中航行时,舰载机允许着舰的海况条件为五级以下,若海情较为恶劣,需等待海况平稳之后再行着舰,以防止事故的发生.本文模拟最一般的情况,搭建的舰船运动模型中的参数按照三级海况下的实际情况进行取值,如表3所示.

表3 三级海况下舰船运动的幅度和频率Tab.3 Amplitude and frequency of ship motion
仿真平台使用MATLAB进行搭建,仿真舰载机从距舰尾2.4 km到降落在理想着舰点的完整着舰过程,得到期间精度因子的变化情况,伪卫星布设的数量及位置的最佳方案,舰载机及航母的运动状态均根据实际情况进行模拟,同时考虑舰船的运动以及舰船载机之间的速度及位置误差.
3.2 结果分析
1)仅采用4颗卫星
仿真结果如图3所示,以此结果作为参考以研究加入伪卫星后对精度因子的影响.从图3可以看出,在着舰过程中精度因子的变化不大,几何精度因子为3.807,水平精度因子为1.868,垂直精度因子为2.732,水平精度因子明显优于垂直精度因子.

图3 仅采用四颗卫星的精度因子Fig.3 Precision factor of only four satellites
2)采用4颗卫星及一颗伪卫星
以将伪卫星布设在航母上的A点为例加入1颗伪卫星之后精度因子的仿真结果如图4所示.从图中可以看出,在着舰过程中精度因子均小于仅采用四颗卫星的仿真结果,而垂直精度因子得到了较为明显的改善,其值在1.8~1.9之间,由于舰船的纵摇、横摇及沉浮等运动,精度因子随之有一定的波动,舰船和舰载机的位置和速度误差相较于舰船的运动是小量,对精度因子的影响不明显.

图4 在A点布设伪卫星后的精度因子Fig.4 The accuracy factor of the pseudolite which is laid at A point
为了得到伪卫星布设点的最佳位置,对每一个可布设点进行仿真,其精度因子在舰载机距舰尾2.4 km和到达舰尾时的值如表4所示.

表4 加入1颗伪卫星后的精度因子Tab.4 The accuracy factor after the addition of one pseudolite
从表中可以看出,加入1颗伪卫星之后,精度因子最好的为B点,其次为G点,再次为H点.若把伪卫星安装在B点,其几何精度因子在2.524~2.904之间,垂直精度因子在1.777~1.850之间,相比仅采用卫星有了突出的改善.
3)采用4颗卫星及多颗伪卫星
以在A点和G点同时布设伪卫星为例,探究加入两颗伪卫星对精度因子的影响,结果如图5所示.可以看出,布设两颗伪卫星之后,相比仅布设1颗伪卫星,精度因子有较为明显的改善.其中几何精度因子在2.6~2.8之间,垂直精度因子在1.6~1.7之间.对于加入2颗伪卫星的其它方案进行仿真,均得到了同样的结论.同时,仿真中发现,应尽量避免将两颗伪卫星布设在横坐标或纵坐标较为接近的位置.在所有组合中,上述的A点和G点的方案表现最佳.

图5 加入2颗伪卫星后的精度因子Fig.5 The accuracy factor after the addition of two pseudolites
图6 为在A点、B点和G点布设共3颗伪卫星的情形,从图中可以看出,布设3颗伪卫星之后,相比布设两颗伪卫星,对精度因子的影响不明显.同时,当伪卫星数目增多时,由此带来的伪卫星之间的时间同步、远近及信号干扰也是需要考虑的问题.
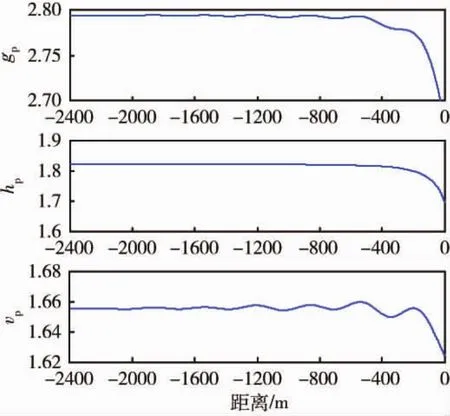
图6 加入3颗伪卫星后的精度因子Fig.6 The accuracy factor after the addition of three pseudolites
4 结论
针对卫星/伪卫星组合着舰导引系统,本文研究伪卫星在航母上的布局方案.该方案首先根据伪卫星的特点及航母的构造分析了伪卫星在航母上可布设的位置,进而利用影响卫星定位精度的精度因子,通过搭建舰载机与航母的相对运动模型计算加入1颗或多颗伪卫星之后对精度因子的影响,从而为伪卫星在航母上的布局提出了方案.仿真结果表明,加入伪卫星对精度因子的改善较为明显,尤其是垂直精度因子,这将大大提高着舰导引系统的垂直定位精度,提高着舰的安全性.如采用布设一颗伪卫星的方案,建议布设在舰尾跑道左端或航母右舷中部或航母右舷前部,若同时布设两颗伪卫星,将达到更加优异的定位效果,而布设3颗以上伪卫星对进一步改善精度因子的效果不明显.
[1]张京娟,谢淑香,高文,等.伪卫星/惯性飞机自动着陆导引技术[J].中国惯性技术学报,2005,13(5): 20-23.ZHANG J J,XIE S X,GAO W,et al.RPS/INS guiding system for aircraft approaching and landing[J].Journal of Chinese Inertial Technology,2005,13(5):20-23.
[2]LIU C,GAO J X,ZI Y Y U,et al.An optimal pseudolites location model of GPS/pseudolites integrated relative positioning[J].Journal of China University of Mining&Technology,2012,41(1):120-126.
[3]KIM C,SO H,LEE T,et al.A Pseudolite-based positioning system for legacy GNSS receivers[J].Sensors, 2014,14(4):6104-6123.
[4]RAPINSKI J,CELLMER S,RZEPECKA Z.Modified GPS/Pseudolite navigation message[J].Journal of Navigation,2012,65(4):711-716.
[5]KIM W J.Pseudo-satellite transmitter and method of transmitting GPS signals using pseudo-satellite transmitter:US,US8618979[P].2013.
[6]FUJII K,SAKAMOTO Y,WANG W,et al.Hyperbolic positioning with antenna arrays and multi-channel pseudolite for indoor localization[J].Sensors,2015,15 (10):25157-25175.
[7]WU D,LU H,CHEN W,et al.Design of a pulsing scheme for BeiDou pseudolites signals[C]//Transportation Information and Safety(ICTIS).Yew Nork:IEEE,2015.
[8]YANG Y,GAO S S,YAN H F,et al.Design on geometric configuration schemes of pseudolite in near space[J].Systems Engineering& Electronics,2014,36 (3):532-538.
[9]SONG Q,ZHANG B,LI S.Study of Configuration Technology of Ground Pseudolite[J].Computer Measurement&Control,2013.
[10]邓刚.基于卫星仰角和GDOP的GPS选星算法[J].数字通信,2010,37(2):47-50.DENG G.Satellite selection algorithm for GPS based on satellite elevation and GDOP[J].Digital Communication,2010,37(2):47-50.
Design on Configuration Schemes of Satellite/Pseudolite Integrated Navigation System
WANG Wei,GUO Huijie,MENG Yue
(School of Instrumentation Science and Opto-Electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
The positioning accuracy of satellite/pseudolite integrated navigation system has close relationship with the geometric configuration of the pseudolites.The layout of the pseudolites on the aircraft carrier is studied in order to improve the positioning accuracy of the system.First,eight points are selected that can be distributed on the aircraft carrier according to the characteristics of the pseudolites and aircraft structure.Then,the simulation model of carrier landing process is built and the flight paths of carrier and aircraft are constructed.At the same time,the ship motion model is introduced into the simulation model in order to be close to the real environment.Finally,the configuration scheme of the pseudolites on the aircraft carrier is proposed after the analysis of the influence of the pseudolites on the positioning accuracy by using the dilution of precision.The results show that the proposed scheme can reduce the dilution of precision,especially the vertical dilution of precision,and improve the positioning accuracy.
landing guidance;pseudolite;dilution of precision;configuration scheme
V249.328
A
1674-1579(2016)03-0027-06
10.3969/j.issn.1674-1579.2016.03.005
王 玮(1977—),女,博士后,副教授,研究方向为卫星导航、惯性导航及组合导航;郭慧杰(1990—),男,硕士研究生,研究方向为卫星导航、惯性导航及组合导航的研究;孟 跃(1992—),女,博士研究生,研究方向为卫星导航、惯性导航及组合导航.
科学基金资助项目(60804056).
2016-03-14
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
导航定位学报(2021年4期)2021-08-29
纺织科学研究(2021年6期)2021-07-15
舰船科学技术(2021年12期)2021-03-29
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
舰船科学技术(2016年1期)2016-02-27
创业家(2015年1期)2015-02-27
汽车零部件(2015年5期)2015-01-03
