
超深耕犁的性能试验与研究分析
2016-04-14 08:27张鲁云郑炫秦朝民何兴村
甘肃农业大学学报 2016年1期
关键词:数据采集
张鲁云,郑炫,秦朝民,何兴村
(新疆农垦科学院机械装备研究所,新疆 石河子 832000)
超深耕犁的性能试验与研究分析
张鲁云,郑炫,秦朝民,何兴村
(新疆农垦科学院机械装备研究所,新疆 石河子832000)
摘要:【目的】 系统阐述新疆农垦科学院机械装备研究所研制的翻转超深耕犁的结构特点和作业机理.【方法】 用数据采集器收集了悬挂点所受拉力,经过软件处理显示了实时曲线,了解深耕作业时各悬挂点的受力变化情况.【结果】 通过田间试验表明,翻转超深耕犁犁耕深度可达85 cm以上,耕深稳定变异系数小于10%,土垡破碎率大于75%,植被覆盖率大于85%,工作可靠性均可达80%以上,各项指标均达到设计要求.【结论】 试验证明该型犁具有作业效率高、稳定性好、结构坚固等优点,是一种性能优良的超深耕作业机具.
关键词:深耕犁;数据采集;实时曲线;性能试验
对土壤进行深耕深松作业是大田农业的基本措施之一,其目的在于改善土壤化学、物理结构,疏松土壤[1-5],而且有助于消灭作物病虫害、田间杂草.农作物根系生长发育需要一定的耕作深度,若耕作深度长期达不到作物生长需要的深度,土壤熟土层厚度将减少,同时犁底层厚度增加.采用深松机械进行深松作业,为作物根系生长提供深厚的耕层空间,加速土壤养分分解与积累,促进土质熟化,提高土壤蓄水保墒能力,可以加厚活土层,进一步提高农作物产量.
西方发达国家对深松机具研究较早,曾做过大量的试验研究工作.如美国约翰·迪尔公司生产的挤压松土式深松机,德国劳尔公司生产的悬挂式深松机,日本研制的多功能振动式深松机,都是性能优良的深松机具.但是进口农机具价格较高,缺少零配件供给和售后服务工作,并且进口深松机械要与超大马力拖拉机相配套使用,国内现有条件往往很难满足.
近年来我国虽然也研制出了一些与免耕作业相配套的深松机具,但大多生产效率较低、功率输出有限、作业速度慢,并且当深松速度达到一定数值后就很难再进行工作了,而且还有可能破坏深松机具,因此也影响了深松机具的作业质量.本试验系统阐述了新疆农垦科学院机械装备研究所研制的新型翻转双向超深耕犁的结构特点和作业机理,以期为超深耕技术的推广应用提供科学依据.
1材料与方法
1.1整机结构及工作原理
新疆农垦科学院机械装备研究所根据我国的实际情况[6],研制的新型翻转双向超深耕犁,如图1所示,主要由上、下牵引板、翻转油缸、主、副犁体、犁柱、犁架大梁等组成.
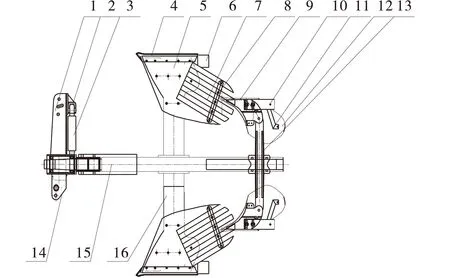
1:上牵引板;2:翻转油缸固定座:3:翻转油缸;4:主犁铧;5:主犁壁;6:主犁侧板;7:主犁栅条;8:栅条加强筋;9:副犁铧 ;10:副犁侧板;11:副犁侧板支撑架;12:副犁体;13:副犁柱;14:下牵引板;15:犁架大梁;16:主犁柱.图1 翻转双向超深耕犁结构图Fig.1 Structure of overturn doubleaction super-deep plow
进行深耕作业时[7-8],上、下牵引板与拖拉机悬挂装置用悬挂销进行连接,由拖拉机牵引拖动.主犁体进行深耕作业,副犁体进行浅耕作业.到地头转向时,翻转油缸对犁架进行1800转向翻转,主犁体对副犁体浅耕作业区进行深耕作业,减小了耕作阻力和拖拉机连续进行深耕作业,提高了工作效率.
1.2仪器与设备
1.2.1数据采集器采集器集成了4类通道组:15个模拟标准传感器信号通道,1个扭矩/速度合成通道,3个转速脉冲信号通道,2个角度信号通道(图2).将天线连接到采集器,按下电源按钮,按钮上的指示灯变亮,采集器开始收集传感器所发射数据.

图2 数据采集器Fig.2 Data acquisition
1.2.2压力传感器安装悬挂式农机具,其水平牵引力为:测得的上拉杆传感器与两悬挂销传感器三处水平牵引力分力矢量之和.
上拉杆传感器安装:按如图3所示,使上拉杆与拖拉机后悬挂及被测农机具连接在一起;用相应的通信线缆,连接上拉杆(拉压力信号接口)与数据采集器的对应通道接口;用相应的通信线缆,连接上拉杆(角度信号接口)与数据采集器的对应通道接口.
图3 上拉杆传感器安装Fig.3 The rod sensor installation
根据拖拉机牵引力学原理,上拉杆是纯两力杆结构,受到拉力或者压力F1,田间测试作业时,上拉杆传感器在测力同时还实时测得上拉杆与地面的相对角度α,因此可得到上拉杆受到的水平牵引力为F1×cosα,则当以机具牵引阻力方向为正方向时,上拉杆受拉力时水平牵引力为正受力,受压力时水平牵引力为负受力;上拉杆受到的牵引阻力垂直分力为F1×sinα,则当以机具牵引阻力方向为正方向时,上拉杆受压力时牵引阻力垂直分力为正受力,受拉力时牵引阻力垂直分力为负受力.
下悬挂销传感器安装:如图4所示,使左右两个下悬挂销与拖拉机后悬挂及被测农机具连接在一起;用相应的通信线缆,连接左侧下悬挂销(拉压力信号接口)与数据采集器的对应通道接口;用相应的通信线缆,连接右侧下悬挂销(角度信号接口)与数据采集器的对应通道接口.

图4 下悬挂销传感器安装Fig.4 Under the suspension pins sensor installation
主机一般为笔记本电脑,操作系统为WinXP或Win7,无线设备通过USB接口连接到主机,如图5所示.

图5 主机连接Fig.5 Host computer connection
2结果与分析
2.1试验场地
试验于2014年11月12日-13日在位于新疆石河子农垦科学院试验基地[9-10](样区中心坐标为N 43°26',E 84°58')的一块收割过的玉米地进行,该地段约为500 m×800 m,形状呈矩形.试验样机为翻转双向超深耕犁1号样机,配套动力为雷沃欧豹TG1454拖拉机,发动机功率106.2 kW,标准牵引力32 kN,最大提升力28 kN.地理位置属于温带大陆性半干旱气候区,年平均气温为6.5~7.2 ℃,年平均降水量125.0~207.7 mm.土壤地质为粘质土壤,土壤含水率为7.6%,平均干容积密度为1.5~1.7 g/cm3.该时期刚进行过秋季作物收获,土壤裸露无植被,处于秋季末期,还未下雪,是进行秋季深耕作业的理想时期.
2.2翻转双向超深耕犁性能试验
试验依据标准GB/T 14225-2008《铧式犁的参数与技术要求》,GB/5667-2008《农业机械生产试验方法》,并结合实际情况确定试验指标:作业速度、纯小时生产率、耕深、耕深稳定变异系数、碎土率、植被覆盖率、工作可靠性等,田间实地测试结果见表1[11-13].
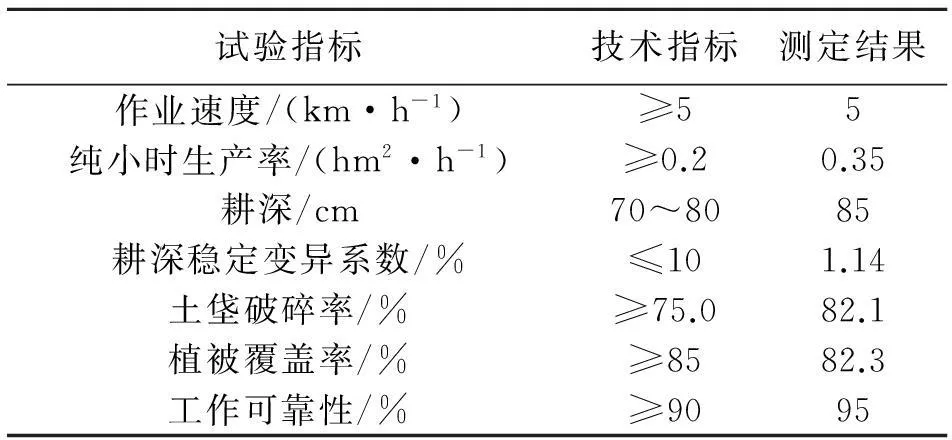
表1 超深耕犁田间试验结果
2.3软件操作运行
软件操作界面如图6所示,此次试验主要测量、收集上悬挂点和左右两个下悬挂点数据.
2.4数据结构
本检测软件将数据分为3个层次,如图7所示.
虚拟通道与物理通道的对应关系如表2所示,其中物理通道数据来自数据采集器各路通道的原始数值,对于4~20 mA的一般传感器信号,系统在内部将其转变为800~4 000的数值,对于特殊的角度信号0.5~4.5 V,系统将其转变为0~4 000的数值;将物理通道数据进行标定(如800~4 000值换算成电流值,即除以200后再换算成扭矩值)后即为虚拟通道数据,这种比例的换算软件已内置;通过对虚拟通道数据进行组合运算(如ch1+ch2+ch3*ch4或ch1等等)后即为显示数据.

图6 软件界面Fig.6 Software interface

图7 数据层次Fig.7 Data hierarchy
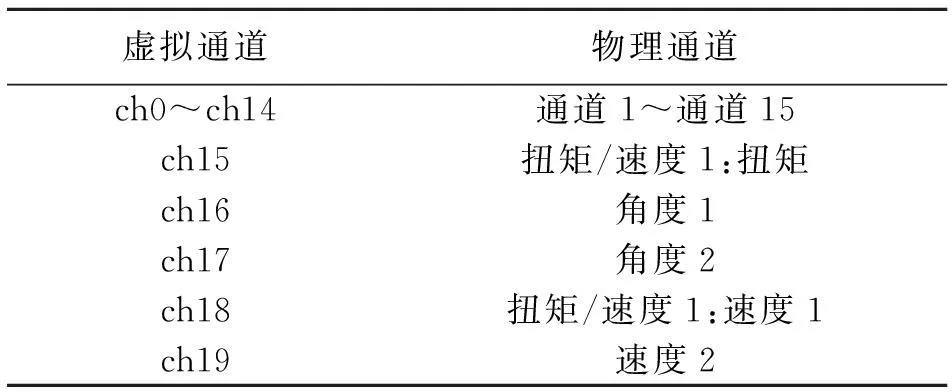
虚拟通道物理通道ch0~ch14通道1~通道15ch15扭矩/速度1:扭矩ch16角度1ch17角度2ch18扭矩/速度1:速度1ch19速度2
2.5数据采样显示
测试数据界面如图8所示,显示各个传感器的实时数据.
上拉杆、左右悬挂销的数据实时曲线显示界面如图9所示.
根据收集、存储数据所生成曲线如图10所示,仅以左下悬挂点为例,在拖拉机平稳作业时,截取试
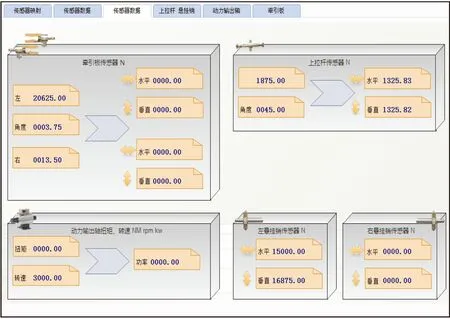
图8 测试数据界面Fig.8 Test data interface

图9 数据实时曲线界面Fig.9 Data real-time curve interface

图10 拉力曲线图Fig.10 Pull graph
验时间5 min内数据.
2.6数据分析
从试验采集数据生成曲线图10可以看出:拉力在26~30.5 kN变化,受力相对均匀,没有较大的波动.翻转双向超深耕犁三点悬挂受力均衡,设计结构合理,且工作可靠、动作协调、性能稳定.
试验结果表明:翻转双向超深耕犁可较好地完成超深耕作业[14-15];具有良好的作业性能和作业效果;土垡破碎率、植被覆盖率、工作可靠性均可达80%以上,通过现场实地挖掘测量,主犁最大耕深85 cm,小副犁最大耕深15 cm,完全达到了设计要求.
通过试验也表明了两点不足之处:
1)配套动力雷沃欧豹TG1454拖拉机,因其发动机功率仅为106.2 kW,在进行深耕作业时(尤其是高速行驶时)容易熄火,明显感到发动机率偏小,建议采用大马力拖拉机与深耕犁配套使用,更好地发挥深耕犁的优异性能.
2)深耕作业后犁体后部栅条出现变形,影响作业质量,建议采用高强度钢制作犁体栅条,并进行热强度处理,避免深耕作业时犁体栅条出现变形情况.
3讨论与结论
1)实践证明长期单一的种植模式[16-17],尤其是近年来实施的保护性免耕耕作方式,导致土壤肥力下降、板结加剧、病菌感染、病虫害增加,土壤容重增大导致作物根系对水分和养分的吸收能力下降,直接影响了作物的产量和质量.
2)经过多年试验表明,通过超深耕深翻作业可以有效改善土壤结构,消灭杂草、减少病虫害,增加土壤蓄水保墒抗旱的能力,提高了作物产量、质量[18].统计数据证明,相对于传统翻耕地,深松耕作能使0~30 cm土层容重降低0.1 t/m3左右[19],提高0~50 cm土层含水率10.9%左右,0~2 m土层含水率11.2%左右,增加作物产量5.7%~11.3%,具有较好的经济效益.
3)新疆农垦科学院机械装备研究所研制的新型翻转双向超深耕犁,根据我国北方旱区农业实际情况设计,通过田间实地测试证明,可以较好地完成深耕作业.该型深耕犁设计思想前卫,结构合理,可进行调幅和入土角调整.通过田间试验,样机犁的耕深、耕宽稳定性、翻垡效果、残茬覆盖率、作业效果均满足设计要求.采用附带小副犁的独特设计能有效减小主犁体耕作阻力,提高耕深及拖拉机行走稳定性.
参考文献
[1]陈德新.土壤机械化深耕深松技术及注意事项[J].现代农业科技,2011(19):265-269
[2]时均莲,邱立春.国内外深松技术及深松机具概况[J].农业机械,2005(3):58-59
[3]廖植樨,邓健,谷谒白,等.全方位深松对土壤物理化学的影响[J].北京农业工程大学学报,1995,15(1):18-24
[4]谷谒白,刘向阳.1SQ-250型全方位深松机的研制与试验[J].北京农业工程大学学报,1994,14(4):42-48
[5]高焕文,李问盈.保护性耕作技术与机具[M].北京:化学工业出版社,2004:170-172
[6]李志红,杨良玖,全腊珍.我国耕整机械现状及发展对策研究[J].农机化研究,2005(3):46-48
[7]杨丽,苏益明,张东兴,等.玉米纸筒苗移栽机运动轨迹分析与性能试验[J].农业工程学报,2014,30(13):35-42
[8]鲁力群,李其昀,赵静.深松旋耕沟播联合作业机深松技术[J].山东理工大学学报:自然科学版,2003,17(6):72-75
[9]李守仁,林金天.驱动型土壤耕作机械的理论与计算[M].西安:西安电子科技大学出版社,2004
[10]余坤,冯浩,李正鹏,等.秸秆还田对农田土壤水分与冬小麦耗水特征的影响[J].农业机械学报,2014,45(10):116-121
[11]孙美,张晓琳,冯绍元,等.基于交叉验证的农田土壤饱和导水率传递函数研究[J].农业机械学报,2014,45(10):116-121
[12]李永磊,宋建农,康小军,等.双辊秸秆还田旋耕机试验[J].农业机械学报,2013,44(6):45-49
[13]郑炫,贾首星,秦朝民,等.翻转双向超深耕犁的研究与设计[J].农机化研究,2010(3):108-114
[14]刘建辉,袁山城.悬挂式单铧翻转深翻犁的研制与应用[J].新疆农机化,2007(6):12-13
[15]席海亮,赵春花,连文香.基于ADAMS的4GH120型牧草收割机切割器运动仿真分析[J].甘肃农业大学学报,2013,48(6):160-163
[16]刘百合.超深耕种植技术与机具[J].农机市场,2003(4):18
[17]高焕文,何明,蒋金琳,等.保护性耕作机械化种植模式与播量试验[J].农业机械学报,2012,43(8):42-45
[18]孙悦超,麻硕士,陈智,等.植被盖度和残茬高度对保护性耕作农田防风蚀效果的影响[J].农业工程学报,2010,26(8):156-159
[19]何进,李洪文,高焕文.中国北方保护性耕作条件下深松效应与经济效益研究[J].农业工程学报,2006,22(10):62-67
(责任编辑赵晓倩)
Performance test and analysis of super-deep plow
ZHANG Lu-yun,ZHENG Xuan,QIN Zhao-min,HE Xing-cun
(Machinery and Equipment Institute of Xinjiang Academy of Agricultural Reclamation Sciences,Shihezi 832000,China)
Abstract:【Objective】Expounding the structural characteristics and operation mechanism of overturn super-deep plow to provide theoretical reference data for application of super-deep technology.【Method】The tensile at suspension point was collected by data acquisition and processed by software to get real-time curve and learn the change of force at each suspension point during deep plowing work.【Result】 Field test showed that plowed depth by the overturn super-deep plow above 85 cm,variation coefficient of tillage depth stability was less than 10%,breaking rate of soil furrow was above 75% ,vegetation coverage was over 85% and work reliability could reach more than 80%,which met the design requirements.【Conclusion】Super-deep plow characterized by high efficiency,good stability and firm structure and was a super-deep plow work tool with good performance.
Key words:super-deep plow;data acquisition;real-time curve;performance test
通信作者:郑炫,女,研究员,主要从事农业机具设计与理论研究.E-mail:jiazhengxuan@sohu.com
基金项目:国家科技支撑计划(2014BAD06B00);新疆农垦科学院引导计划(79YYD201504).
收稿日期:2015-03-27;修回日期:2015-04-24
中图分类号:S 222.1
文献标志码:A
文章编号:1003-4315(2016)01-0156-05
第一作者:张鲁云(1972-),男,硕士,助理研究员,主要从事农业机具设计制造研究.E-mail:zhangluyun1972@163.com
猜你喜欢
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年27期)2016-12-15
农业与技术(2016年15期)2016-11-09
科技视界(2016年18期)2016-11-03
软件工程(2016年8期)2016-10-25
软件工程(2016年8期)2016-10-25
中国新通信(2016年16期)2016-10-18
大众理财顾问(2016年3期)2016-06-13
