基于惯容器的机械振动被动控制系统传递特性分析
2016-04-18 01:41刘彦
中国舰船研究 2016年1期
关键词:机械系统
刘彦
1船舶振动噪声重点实验室,湖北武汉4300642中国舰船研究设计中心,湖北武汉430064
基于惯容器的机械振动被动控制系统传递特性分析
刘彦1,2
1船舶振动噪声重点实验室,湖北武汉430064
2中国舰船研究设计中心,湖北武汉430064
摘要:惯容器作为一种新型的被动控制元件,给机械设备振动的被动控制设计提供了新的思路。将惯容器分别以串联和并联的方式融入隔振与吸振系统之中,获得4种易于工程实施的机械振动被动控制系统。分别建立这4型系统的数学模型,利用Matlab仿真分析其振动传递特性。结果表明:在现有的隔振系统或者吸振系统中并联惯容器并不能取得控制效果的提升;在隔振系统基础上,串联惯容器模块,可在不改变原系统高频隔振效果的基础上,有效提升中、低频,尤其是反共振峰值处的隔振效果;在吸振系统中串联惯容器,可获得2个反共振峰值,且峰值频率可通过参数变化进行调整。
关键词:机械系统;被动控制;惯容器;传递特性
0 引 言
2002年,Smith创造性地提出了惯容器概念[1],即两端自由的质量单元,并给出了一种齿轮—齿条式惯容器模型,实现了机械系统与电路系统的完全对等模拟,使得运用电子网络理论和研究方法对机械网络进行研究成为可能。在此基础上,国内、外学者对惯容器结构形式开展了研究。如Papageorgiou等[2]研制了2种惯容器原理样机,并在实验室开展了试验验证,Wang等[3]提出了一种液力惯容器并申报了专利,聂佳梅等[4]提出了扭转惯容器的概念,并找到了实现装置。目前,惯容器主要应用在车辆悬架系统与建筑物隔振之中[5-7]。
惯容器不仅丰富了被动控制元件的类型,同时它的视在质量还是其自身质量的几十倍乃至数百倍[3],因此惯容器概念的提出为机械设备振动的被动控制设计提供了新的思路,但这方面的研究成果相对较少。考虑到基于电气网络理论的“黑箱”法设计的控制系统由于没有虑及工程实际中的结构布置、空间等因素[8],往往存在工程应用性差的问题,为增强工程指导价值,本文将惯容器分别以串联和并联的方式加入工程中广泛应用的隔振与吸振系统之中,获得4种工程实现方便的机械振动被动控制系统,并分别建立这4种被动控制系统数学模型,仿真分析这些系统的振动传递特性,给出惯容器对振动传递特性的影响规律。
1 理论模型
1.1惯容器基本原理
通常的质量单元在电—声类比中被视作一端接地的电容,实际上制约了质量单元作用的发挥,因此,剑桥大学的Smith于2002年创新性地提出了两端自由的质量单元模型[1],实现了机械系统与电气系统的完全对应,典型结构如图1所示。

图1惯容器原理图Fig.1 Schematic of the mechanical model of an inerter
依据牛顿第二定律,惯容器所承受的力可以表示为:

式中:m为飞轮质量;r1为小齿轮的半径;r2为齿轮的半径;r3为飞轮小齿轮的半径;γ为飞轮的回转半径;vt1为终端1的速度;vt2为终端2的速度。
1.2基于惯容器的机械振动被动控制系统建模
目前在机械设备振动被动控制领域,应用最为广泛的主要是隔振和吸振2种形式,而新的控制元件的引入,其布置方式无外乎并联或串联这2种方式。考虑到结构布置与空间等制约因素,本文主要研究以下4种结构形式的惯容器被动控制系统,即隔振—惯容器并联系统、隔振—惯容器串联系统、吸振—惯容器并联系统、吸振—惯容器串联系统。
1.2.1隔振—惯容器并联
该系统的原理图及对应的电—声类比图[9]如图2所示。

图2隔振—惯容器并联系统原理图及其电—声类比图Fig.2 Schematic of isolation system parallel inerter and its electro-acoustic analogy model
求解上述电—声类比图,可得

被动控制系统的传递函数即为


1.2.2隔振—惯容器串联
由于惯容器没有刚度,不具备支撑能力,因此串联使用时必须并接弹簧单元,整个系统的原理图及其电—声类比图如图3所示。
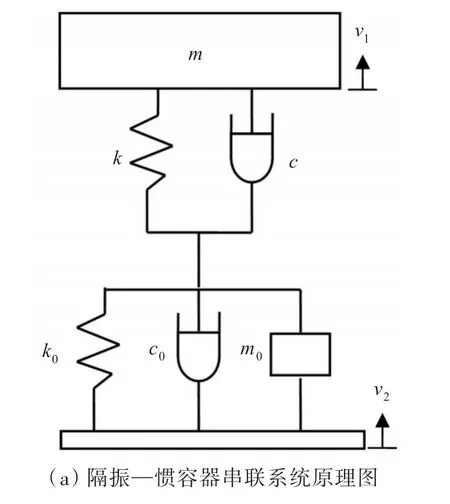

图3隔振—惯容器串联系统原理图及其电—声类比图Fig.3 Schematic of isolation system series inerter and its electro-acoustic analogy model
求解该电—声类比图,有


式中:λ1= 1 + Rm0+ Rk0+ 4ξ2Rc0;λ2= 1 + Rm0+ Rc0。
1.2.3吸振—惯容器并联
该系统的原理图及对应的电—声类比图如图4所示。

图4吸振—惯容器并联系统原理图及其电—声类比图Fig.4 Schematic of absorber system parallel inerter and its electro-acoustic analogy model
求解该电—声类比图,可得


式中:

1.2.4吸振—惯容器串联
与隔振—惯容器串联类似,串接状态下,惯容器必须并接弹簧单元,整个系统原理图及其电—声类比图如图5所示。
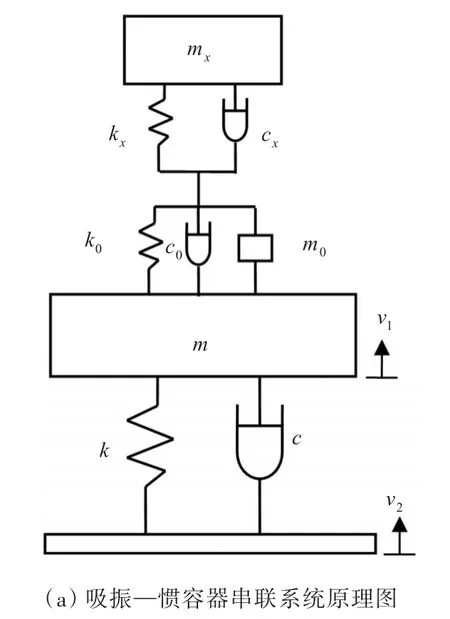
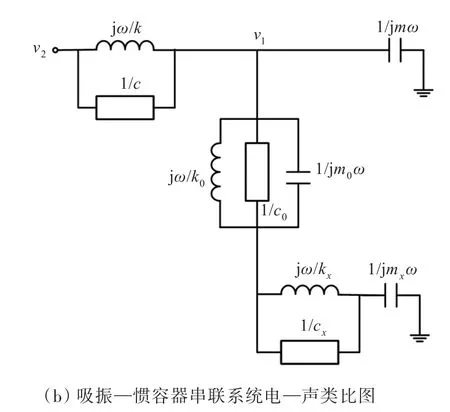
图5吸振—惯容器串联系统原理图及其电—声类比图Fig.5 Schematic of absorber system series inerter and its electro-acoustic analogy model


式中:



2 振动传递特性数值仿真与分析
下面,利用仿真软件Matlab分析上述4种结构的振动传递特性。
1)隔振—惯容器并联系统。
不失一般性,设原系统阻尼比ξ=0.1,分析不同质量特性的惯容器对振动传递特性的变化,结果如图6所示。由图可见,在原有的隔振系统中加入惯容器,将使得传递函数在共振频率后的一段频率范围内优于原系统,但很快恶化,并迅速趋近于Rm0/(1+Rm0)。随着质量比Rm0的增加,隔振效果较原系统有所提升的范围逐渐收窄,且传递函数渐近值逐步提升。总体而言,这种并入惯容器的方式,是以大幅损失高频隔振效果来获得中、低频区的改善,如在Rm0=0.3时,整个隔振系统在中、高频段的隔振效果就很难超过12 dB,而当Rm0<0.1时,虽然中、高频隔振效果可以接近20 dB,但低频几乎没有改善。可见这种结构形式在减振降噪系统中并不适用。

图6隔振—惯容器并联系统振动传递特性变化曲线Fig.6 Influence to transfer characteristics of isolation system parallel inerter
2)隔振—惯容器串联系统。
由电—声类比图可见,惯容器模块与原有弹簧—阻尼单元的布置顺序不影响振动传递率。需要注意的是,由于串入了一个弹簧单元,使得整个系统的刚度特性与原系统发生了变化,因此传递特性比较需以惯容器与原系统质量比Rm0=0为基准。不失一般性,设ξ=0.1,Rk0=1,Rc0=0.2,分析惯容器质量特性变化带来的影响,结果如图7所示。惯容器的存在使得共振峰到反共振峰之间的传递效率有所提升,尤其在反共振峰值处有显著的提升,且这种提升随着惯容器质量特性的增加而增加,在Rc0=0.2的情况下反共振点有15~20 dB的提升,但对应的改善频段逐步缩短。由式(7)可见,当Rm0>0时,系统传递在高频时退化为即与原系统传递率保持一致,与串接模块中的刚度和阻尼参数无关。可见,在传统的隔振系统中串联惯容器,可在不改变原系统隔振高频隔振效果的基础上,有效提升中、低频的隔振效果,尤其对机械系统低频特征线谱的消除具有非常广阔的应用前景。


图7隔振—惯容器串联系统振动传递特性变化曲线Fig.7 Influence to transfer characteristics of isolation system series inerter
3)吸振—惯容器并联系统。
不失一般性,设ξ=0.1,Rk0=0.3,Rmx=0.3,Rc0=0.05。由图8(a)可见,在吸振器刚度和阻尼不变的条件下,惯容器的出现相当于吸振系统的等效质量的增加,因此使得将使得吸振区向低频移动,然而当刚度配合等比例增加时(图8(b)),吸振效果并没有像单纯的动力吸振器那样随着附加质量(吸振器刚度与附加质量比保持不变)的提升而提升,不仅如此,惯容器质量特性的增加还收窄了吸振的有效区间。由此可见,这种结构形式并不能发挥惯容器的优势,在机械振动被动控制领域应用价值有限。

图8吸振—惯容器并联系统振动传递特性变化曲线Fig.8 Influence to transfer characteristics of absorber system parallel inerter
4)吸振—惯容器串联系统。
与隔振—惯容器串联一样,在这种结构形式中惯容器必须并接弹簧单元,因此需要以Rm0=0为对比基准,以去除系统刚度特性变化带来的影响。不失一般性,设ξ=0.1,Rkx=0.6,Rmx=0.3,Rcx=0.1,Rk0=0.6,Rc0=0.1。分析惯容器质量特性变化带来的影响。由图9可见,惯容器的出现将出现2个反共振峰,分布于单纯吸振器传递曲线反共振峰的两侧。随着惯容器隔振质量的增加,第1阶反共振峰有所降低,第2阶则有所提升,且这2个反共振峰都将向低频移动。在工程实际中,可以通过调整kx,k0,m0,调整2个反共振峰的位置与大小来实现2个频段的吸振效果。
3 结 论
将惯容器以并联和串联2种方式接入传统的隔振与吸振系统之中,形成了4种易于工程实现的机械振动被动控制系统模型,仿真分析了这些系统的振动传递特性,相关结论如下:
1)无论是隔振系统还是吸振系统,直接并入惯容器并不能取得被动控制效果的提升。

图9吸振—惯容器串联系统振动传递特性变化曲线Fig.9 Influence to transfer characteristics of absorber system series inerter
2)在隔振系统的基础上串联惯容器模块,可在不改变原系统高频隔振效果的基础上有效提升中、低频,尤其是反共振峰值处的隔振效果,其在机械设备中、低频隔振及低频特性线谱消除领域应用前景广阔。
3)在吸振系统中串联惯容器可获得2个反共振峰值,可以通过改变kx,k0和m0等参数,调整2个反共振峰的位置与大小来实现2个频段的吸振效果。
参考文献:
[1]SMITH M C. Synthesis of mechanical networks:the in⁃erter[J]. IEEE Transactions on Automatic Control,2002,47(10):1648-1662.
[2]PAPAGEORGIOU C,SMITHM C. Laboratory experi⁃mental testing of inerters[C]//Proceedings of the 44th IEEE Conference on Decision and Control. Seville,Spain:IEEE,2005:3551-3556.
[3]WANG F C,LIN T C. Hydraulic inerter mechanism:US 20090139225[P]. 2009-06-04.
[4]聂佳梅,张孝良,江浩斌,等.惯容器模型结构探索
[J].机械设计与研究,2012,28(1):29-32.
NIE Jiamei,ZHANG Xiaoliang,JIANG Haobin,et al. Research on the inerter structure[J]. Machine Design and Research,2012,28(1):29-32.
[5]MARIAN L,GIARALIS A. Optimal design of a novel tuned mass-damper-inerter(TMDI)passive vibration control configuration for stochastically support-excited structural systems[J]. Probabilistic Engineering Me⁃chanics,2014,38:156-164.
[6]GONZALEZ-BUELGA A,CLARE L R,NEILD S A,
et al. An electromagnetic inerter-based vibration sup⁃
pression device[J]. Smart Materials and Structures,2015,24(5):055015.
[7]HU Y L,CHENM Z Q. Performance evaluation for in⁃erter-based dynamic vibration absorbers[J]. Interna⁃tional Journal of Mechanical Sciences,2015,99:297-307.
[8]陈龙,杨晓峰,汪若尘,等.基于二元件ISD结构隔振机理的车辆被动悬架设计与性能研究[J].振动与冲击,2013,32(6):90-95. CHEN Long,YANG Xiaofeng,WANG Ruochen,et al. Design and performance study of vehicle passive suspension based on two-element inerter-springdamper structure vibration isolation mechanism[J]. Journal of Vibration and Shock,2013,32(6):90-95.
[9]杜功焕,朱哲民,龚秀芬.声学基础[M].南京:南京大学出版社,2001.
Analysis of the transmission characteristics of mechanical passive control systems with the inerter
LIU Yan1,2
1 Science and Technology on Ship Vibration and Noise Key Laboratory,Wuhan 430064,China 2 China Ship Development and Design Center,Wuhan 430064,China
Abstract:As a novel mechanical network element, the inerter instills new thoughts into the passive control design for mechanical systems. In this paper, four kinds of easy-to-apply passive control systems are devel⁃oped by integrating the inerter into vibration isolation and absorbing systems, in the way of series and paral⁃lel. The models of these systems are established next, with their transmission characteristics being simulat⁃ed and studied with MATLAB. It is observed that the control performance of either the isolation system or the absorbing system shows little improvement under the parallel mode. On the contrary, connecting an in⁃erter in series mode effectively improves the performance at the mid-low frequencies, especially at an⁃ti-resonant frequency, without compromising the effect at high frequencies. Also, the absorbing system can gain two anti-resonant frequencies by connecting an inerter in series mode, and the anti-resonant frequen⁃cies can be adjusted by changing the parameters of the system.
Key words:mechanical system;passive control;inerter;transmission characteristics
作者简介:刘彦(通信作者),男,1979年生,博士,高级工程师。研究方向:噪声振动控制。E-mail:liuyanhit@gmail.com
基金项目:国家部委基金资助项目
收稿日期:2015 - 04 - 20网络出版时间:2016-1-19 14:55
中图分类号:U661.44
文献标志码:A
DOI:10.3969/j.issn.1673-3185.2016.01.014
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160119.1455.030.html期刊网址:www.ship-research.com
引用格式:刘彦.基于惯容器的机械振动被动控制系统传递特性分析[J].中国舰船研究,2016,11(1):108-113,120. LIU Yan. Analysis of the transmission characteristics of mechanical passive control systems with the inerter[J]. Chi⁃nese Journal of Ship Research,2016,11(1):108-113,120.
猜你喜欢
科学与财富(2017年15期)2017-06-03
科技与创新(2017年1期)2017-02-16
现代商贸工业(2016年17期)2017-02-15
科技与创新(2016年19期)2016-11-09
科技与创新(2015年22期)2015-12-02
科技资讯(2015年7期)2015-07-02
建材发展导向(2014年5期)2014-10-20