汽车危险报警灯与转向灯的随动系统设计
2016-04-18 07:50宋百玲刘伟学孙振伟张红志李孟飞张东振
森林工程 2016年3期
关键词:转向灯
宋百玲,刘伟学,孙振伟,张红志,李孟飞,李 冲,张东振
(东北林业大学 交通学院,哈尔滨 150040)
汽车危险报警灯与转向灯的随动系统设计
宋百玲,刘伟学,孙振伟,张红志,李孟飞,李冲,张东振
(东北林业大学 交通学院,哈尔滨 150040)
摘要:通过运用AVR单片机及汽车电路转换原理设计一个电路系统,对车灯系统的构造进行改善,使转向灯打开的同时危险报警灯相应关闭,使其他车辆和行人轻松分辨该车的转向,从而增强了机动车的安全性能,将起到避免交通事故的作用。该系统具有功能强、使用灵活、可靠性高、成本低、体积小、面向控制和具有智能化功能的优点。
关键词:AVR单片机;转向灯;危险报警灯;随动系统
0引言
随着汽车行业的高速发展,汽车的保有量迅速增加。同时,每年因交通事故造成的人民生命财产损失也不计其数,汽车安全性能越来越受到人们的重视。当遇到紧急情况时,汽车应打开危险报警灯,两侧闪光灯闪起,以提醒其他车辆和行人。此时汽车若再打开转向灯,则失去了转向指示功能,容易引发交通事故。目前国内外虽然有很多关于这个问题的研究,但是针对这个问题的具体解决方案和设计仍然没有实现[1-2]。设计的汽车危险报警灯与转向灯的随动系统便可以解决这个问题,运用AVR单片机和汽车电路转换原理设计,能够使转向灯打开的同时危险报警灯相应地关闭,使其他车辆和行人轻松辨别其转向,从而达到增强汽车安全性,避免交通事故的目的[3]。在原来的设计下,当汽车危险报警灯时,两侧闪光灯同时闪烁,此时转向灯开关对其控制不起作用[4]。
通过在电路系统中对单片机写入相应的程序,使不同的按键信号输出高低不同的电平,从而控制发光二极管的熄灭和闪烁频率,从而实现在打开危险报警灯时的转向指示功能。电路图如图1所示,左侧为左转向灯、右转向灯、危险报警灯开关;中间为单片机控制系统:右侧为灯光系统(小灯泡额定电压为2.5V,正常工作时电阻为10 Ω,串联电阻均为10 Ω)。正常情况下,汽车左转时打开L开关,D1、D3、D5灯闪起;汽车右转时打开右转向开关,D2、D4、D6灯闪起。当危险报警开关D打开后,D1、D2、D3、D4、D5、D6灯同时闪起。而此时若右转,再打开右转向开关R,则D1、D3、D5灯会立即熄灭,当右转向开关R关闭后又恢复闪烁;此时若需左转,再打开左转向开关L、D2、D4、D6灯会立即熄灭,当左转向开关L关闭后又恢复闪烁,从实现转向功能[5-7]。
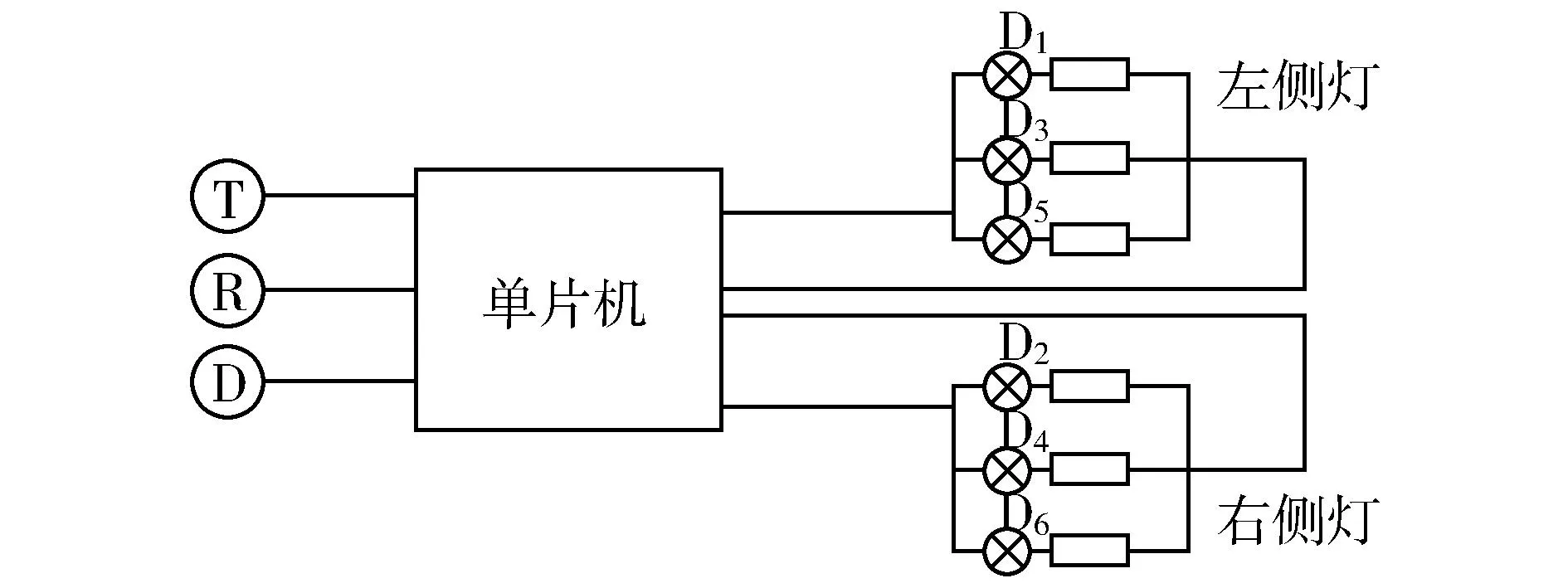
图1 电路设计Fig.1 Circuit design
1电路设计
单片机作为一种微型电脑,通过对它输入特定程序,便可实现相应的需求。通过对按键和发光二极管的控制来模拟汽车危险报警和转向灯,AVR单片机控制原理如图2所示,S20按键控制12345678发光二极管亮灭,代替危险报警灯;S21按键控制1234发光二极管发光5678发光二极管熄灭,代替新型右转向灯;S22按键控制5678发光二极管发光1234发光二极管熄灭,代替新型左转向灯。

图2 AVR单片机控制原理Fig.2 The control principle of AVR single chip microcomputer
发光二极管工作的基本原理就是通过给其正负两端加上一定的电压,二极管由正极到负极有一定电流经过,从而发光。发光二极管采取灌电流的工作方式,即当单片机向对应的控制I/O口写入“0”时,与之相连接的二极管发光,当单片机向对应的控制I/O口写入“1”时,与之相连接的二极管熄灭[5]。
ATmeaga128A共有53个I/O口,其中D0-D7连接到PB0-PB7作为8位LED发光二极管的控制口,S20、S21、S22分别连接到单片机的PC4、PC5、PD0作为3个按键的控制口[8-9]。通过将单片机的PB0-PB7口设置为输出状态,根据S20、S21、S22三个按键的按下情况,控制不同的发光二极管点亮或熄灭。
2控制程序设计
#include “avr/io.h”
#include “stdio.h”
#include “math.h”
#include “string.h”
volatile unsigned char aaa=0;
#define S20_DIR DDRC&=(~(1<<4))
#define S20_IN_MODE PORTC|=(1<<4)
#define S20_CHECK(PINC&(1<<4))
#define S21_DIR DDRC&=(~(1<<5))
#define S21_IN_MODE PORTC|=(1<<5)
#define S21_CHECK(PINC&(1<<5))
#define S22_DIR DDRD&=(~(1<<0))
#define S22_IN_MODE PORTD|=(1<<0)
#define S22_CHECK(PIND&(1<<0))
#define led_dir DDRB=0XFF
#define led_off PORTB=0XFF
#define led_on PORTB=0
#define left_led_on PORTB=0X0F
#define left_led_off PORTB=0XFF
#define right_led_on PORTB=0XF0
#define right_led_off PORTB=0XFF
int main()
{
S20_DIR;
S20_IN_MODE;
S21_DIR;
S21_IN_MODE;
S22_DIR;
S22_IN_MODE;
led_dir;
led_off;
while(1)
{
if(!S20_CHECK)
{
led_on;
while(!S20_CHECK);
aaa++;
if(aaa==2){aaa=0;led_off;}
}
// else
// {led_off;}
if(!S21_CHECK)
{left_led_on;}
// else{left_led_off;}
if(!S22_CHECK)
{right_led_on;}
// else
// {right_led_off;}
}
}
/*volatile signed char aa=0;
volatile unsigned int i,j,val;
volatile unsigned int *p;//=(volatile unsigned int*)(0x0100);
int main()
{
int a[9]={1,8,9,51,0,2,45,8};
/*for(i=0;i<8;i++)
for(j=0;j<8-i;j++)
{
if(a[j] { a[8]=a[j]; a[j]=a[j+1]; a[j+1]=a[8]; } }while(1) { a[8]=9; SP=0X025F; *(volatile unsigned int*)(0x0100)=a[8]; *p=*(unsigned int*)(0x0100); val=30; } }*/ PORTX代表数据寄存器[10-11],十六进制转化为二进制后每一位控制一个端口。DDRX代表方向寄存器,同理转化为二进制后0代表输入,1代表输出。PINX代表输入引脚寄存器,当I/O工作在输入方式,要读取外部引脚上的电平时,应读取PINxn的值,而不是PORTxn的值。 3实物调试 按照前文进行设计,将单片机板上的S20键、S21键、S22键,分别做为危险报警灯开关,右转向灯开关,左转向灯开关;1234号发光二极管做为右转向灯,5678号二极管做为左转向灯。对AVR单片机输入编写好的程序。 此时8个发光二极管全部为熄灭状态。此时按下S20键(危险报警灯开关),则8个发光二极管(左右转向灯)全部发光(即危险报警灯打开,进行危险报警提醒),如果此时按下S22(左转向灯开关),5678发光二极管(左转向灯)发光,1234发光二极管(右转向灯)熄灭(即新型左转向灯正常工作);如果此时按下S21(右转向灯开关),1234发光二极管(右转向灯)发光,5678发光二极管(左转向灯)熄灭(即新型右转向灯正常工作)。 4结论 交通飞速发展的今天,车辆技术发展越来越快,无疑也暴露了越来越多的问题,危险报警灯与转向灯之间的矛盾便是其一。运用AVR单片机原理和车灯系统基本原理对AVR单片机输入改进后的程序,可以智能灵活的控制车灯系统的运行。 通过系统实验表明,该系统简单易行;造价低;工作可靠;通过对车灯系统的构造进行改善,实现了转向灯打开的同时危险报警灯相应关闭,如打开危险报警灯的前提下,再打开左转向灯,右测转向灯对应关闭,使其他车辆和行人轻松分辨该车的转向,从而增强了机动车的安全性能,将起到避免交通事故的作用。 【参考文献】 [1]奚碧清.基于MATLAB 的汽车被动安全评价模型研究[J].机械工程与自动化,2015,2(1):61-62. [2]安妮.用单片机设计汽车转向灯控制系统[J].科技创新导报,2011,11(26):83. [3]吴凌燕,王剑舵,邵红.基于Proteus的汽车转向灯设计[J].计量与测试技术,2011,38(11):26-27. [4]郭宏亮,范青青.基于单片机控制的汽车转向同步照明装置[J].制造业自动化,2009,31(7),121. [5]沈亚丹.汽车电子中的LED驱动电路的研究设计[D].杭州:浙江大学,2013. [6]王秀.汽车转向灯控制器设计[J].电子技术,2011,38(1):75-77. [7]杜利光.复杂行车环境下智能车灯控制系统设计与实现[D].北京:中国科学院,2012. [8]张新,陈跃琴.AVR单片机应用开发24例-基于proteus仿真[M].北京:电子工业出版社,2014. [9]邵子扬.AVR单片机应用专题精讲[M].北京:北京航空航天大学出版社,2013. [10]Barnntt R,O’cull L,Cox S.嵌入式C编程与Atmel AVR[M].周俊杰等,译.北京:清华大学出版社,2003. [11]黄国纯,匡松.C语言程序设计[M].北京:北京希望电子出版社,2006:30-143. Design of Servo System of the Automobile DangerousWarning Lamp and the Steering Lamp Song Bailing,Liu Weixue,Sun Zhenwei,Zhang Hongzhi,Li Mengfei,Li Chong,Zhang Dongzhen (Traffic College,Northeast Forestry University,Harbin 150040) Abstract:A circuit system was designed based on AVR microcontroller and motor circuit conversion principle to improve the structure of the car light system,so that the danger warning light can be turned off while the steering light was turned on.The design can help other vehicles and pedestrians easily distinguish the steering direction of the vehicle,which can enhance the safety of motor vehicles and avoid traffic accidents.This system has many advantages such as strong function,flexible use,high reliability,low cost,small size,high reliability,and intelligent control. Keywords:AVR single chip microcomputer;turning lamp;hazard warning light;servo system 中图分类号:U 467.3 文献标识码:A 文章编号:1001-005X(2016)03-0057-03 作者简介:第一宋百玲,博士,副教授。研究方向:动力机械自动控制与测试。E-mail:sbllht@163.com 基金项目:东北林业大学生创新项目(60202008) 收稿日期:2015-11-03 引文格式:宋百玲,刘伟学,孙振伟,等.汽车危险报警灯与转向灯的随动系统设计[J].森林工程,2016,32(3):57-59.
猜你喜欢
汽车维护与修理(2020年18期)2020-10-15
汽车维修与保养(2020年1期)2020-04-19
汽车电器(2020年2期)2020-03-13
汽车维护与修理(2020年17期)2020-03-10
汽车维护与修理(2019年13期)2020-01-01
模具制造(2019年3期)2019-06-06
作文·初中版(2017年12期)2017-12-23
中老年健康(2016年10期)2016-11-19
信息记录材料(2016年4期)2016-03-11
北京汽车(2015年5期)2015-12-04