汽车电动助力转向系统控制策略初探
2016-05-30 03:23张明
中国高新技术企业 2016年20期
张明
摘要:随着经济的不断发展,我国汽车行业步入了高速发展期,而基础的汽车电动助力转向系统对于汽车的运行质量来说具有重要的意义,相关汽车生产企业要优化整体系统的控制工作。文章对于汽车电动助力转向系统的系统结构以及建模进行了分析,并对整体系统控制方案以及策略进行了阐释。
关键词:汽车制造;电动助力转向系统;控制策略;运行质量;系统结构 文献标识码:A
中图分类号:U461 文章编号:1009-2374(2016)20-0109-02 DOI:10.13535/j.cnki.11-4406/n.2016.20.054
1 汽车电动助力转向系统结构和基本建模内涵
1.1 汽车电动助力转向系统基础结构
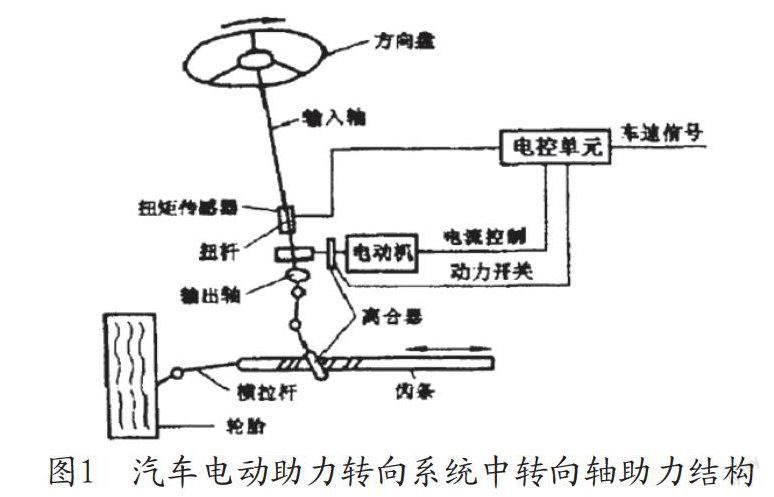
汽车电动助力转向系统在汽车运行过程中,由于基础结构和位置的不同,主要包括转向轴助力结构、齿轮助力结构以及齿条助力结构,虽然各自位置不同,但是基础工作原理都很相近,其中最为典型的就是转向轴助力结构,整体的工作原理如图1所示:
主要依托输入轴和输出轴的动力,通过基础传动机构引导整体转向拉杆进行车轮的转向,另外还要保证驾驶员在实体操作过程中,输入轴产生规定化的角位移,车速的基础传感器能对基本车速进行测试,并将整体运行信号进行有效传输,实现电控单元的信号收取,从而判断整体助力以及助力的方向。汽车内部基础系统会计算出相应助力转矩的数值并及时输出相应的控制信号,指导驱动电路进行电压和电流的供给,在电动机输出基本转矩的过程中推动整体转向轴起到助力转向作用,实现整体实时控制。针对故障和超速情况,就会根据基础控制系统的要求,保证在离合器切断的基础上将系统转为人工操作。另外,汽车电动助力转向系统还包括基础信号传感器、助力转向结构以及ECU等项目,能实现整体信号和运行措施的升级。汽车电动助力转向系统一般为减速结构,在电动机力矩输出的运行中减速增扭,以实现助力系统的完善。
1.2 汽车电动助力转向系统建模内涵
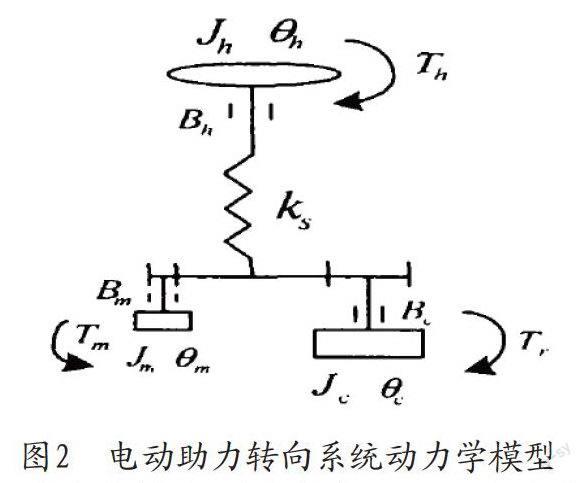
要对基本汽车电动助力转向系统进行合理化的受力分析,驾驶员在基础转向运行时,主要的作用力在方向盘上,在汽车电动助力转向系统的辅助下,通过基础的系统结构对整体阻力矩实现汽车的转向操作。这就需要相关驾驶人员充分掌握基础操纵力、汽车的阻力矩以及电机的助力矩。在进行基础建模的过程中,会根据直流电动机驱动以及基础电压控制进行系统分析,如图2所示:
要根据基本的转向系动力学方程和直流电动机模型进行基础数值的测算,在建模过程中实现整体转向系统的动态规划和分析,从而实现单位反馈系统的升级。
2 汽车电动助力转向系统基础设计方案
2.1 汽车电动助力转向系统主控软件
在汽车电动助力转向系统中基本的转向系统使用单片机系统,对基本的信号处理使用的也是微处理器,实现对主控芯片的集成性功能优化。在基础设计中,不仅要保证设计的控制系统短小精干,基础项目成本符合实际,也要对保证汽车电动助力转向系统子系统的集成结构合理,对整体软件开发的要求就是程序有效并且周期缩短,只有实现整体控制结构的性能优化,才能保证整体性能指标的优化。
2.2 汽车电动助力转向系统执行电动结构
在汽车内部的汽车电动助力转向系统能实现基本低转速大扭矩的结构,波动也比较小,整体转动惯量和尺寸都要求较高,并且也要提升可靠性能的基础要求。基本的工作原理中直流电动机要根据无刷和有刷结构进行进一步的工作要求,实现整体运行原理的统一化。
2.3 汽车电动助力转向系统扭矩传感器结构
在汽车电动助力转向系统中,扭转传感器主要用于检测转向盘中基础扭转的数值和方向,整体的结构非常简单,整体工作性能的可靠性也十分高,基本的精确度数值也比较适中。非接触扭转传感器在运行中,虽然基本的精确度比较高,但是整体价格偏高,能将负载扭转矩引起的扭转角位移在电器上的电阻值变化,并且要对基本的滑环传输出的基本传感器信号进行优化整理,保证试验运行中电压以及加载转矩的数据合理化。
2.4 汽车电动助力转向系统主功率逆变器结构
在汽车电动助力转向系统中采用的是基础直流电动机,并且要利用基本调解电枢电压实现脉冲效能的优化。在PWM技术运行中,基本的蓄电池直流电压变成基础的电压脉冲,能促进整体系统的运行顺畅,并且保证整体转向能力的优化升级。另外在汽车电动助力转向系统主功率逆变器结构中,H型逆变器的基础控制方式是双极式、单极式以及受限单极式,相关工作人员要对基本的电路构成特点进行集中的管理和控制,并对基础脉冲信号进行集中的测算和管理,要求在基础周期内保证单极式变换器的脉冲结构和波形形成统一结构。
3 汽车电动助力转向系统控制策略分析
3.1 汽车电动助力转向系统基础助力控制
在汽车转向过程中,要运算回正力矩和传动比的关系,转向力不能过小,要实现摩擦力的有效控制,减小反冲带来的行车压力。另外,在液压动力转向器中,基础的液压助力基数是固定的,这就需要相关人员在运行过程中对于扭杆的刚度和基础过流面积进行控制,保证汽车电动助力转向系统中助力特性和基础策略的运行完整。
3.2 汽车电动助力转向系统电机输出转矩控制
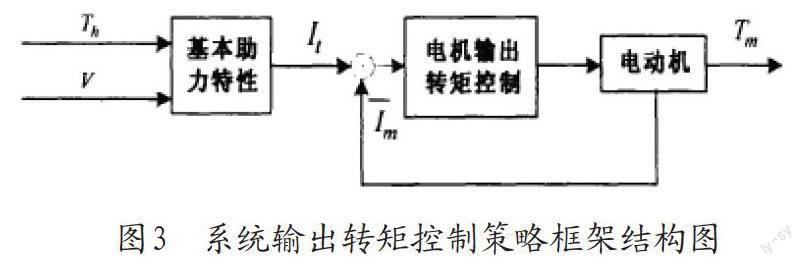
汽车电动助力转向系统的基本输出转矩主要依据电流控制算法以及电机转矩控制组成,需要驾驶员对基础方向盘进行力矩和车速的控制,并对目标电流和电机反馈电流进行实际转矩的优化计算和闭环控制,实现整体数据的收集和汇总,对实际输出转矩和目标转矩的关系进行精细化的整合。基本的系统输出转矩控制结构如图3所示:
基础控制系统要依据实际驾驶人员施加在键盘上的力矩和车速进行分析,保证基本预制助力特性能实现对电机目标助力大小和方向的控制,要针对汽车电动助力转向系统的基本特征进行转向力矩的灵敏度控制,保证助力电机不会因为负荷过大而导致故障的产生。
3.3 汽车电动助力转向系统基础控制方法
随着科技的进步,引进了汽车电动助力转向系统,整体微控制器也得到了有效的升级,促进了整体汽车的轻便性能和高速转向性能的优化提高,也实现了整体汽车结构的优化。在基础控制方法中主要包括助力控制和阻尼控制。在助力控制中,基本控制结构的项目是在转向过程中进行的,能有效减轻整体方向盘的控制阻力,有效地将减速结构对转向性能的控制维系在基础控制结构中。
在汽车电动助力转向系统软件设计方案运行中,要根据基本的单片机软件编程语言能进行高级语言和低级语言的区分,并利用C语言等技术进行汇编语言程序的升级,主要的运用结构要根据实际运行情况而定。在汽车电动助力转向系统中,基本的结构化程序设计要求非常细化,对于整体故障检测以及处理模块进行数据的细化分析,对信号采集及处理模块进行技术分析,并对助力特性算法模块进行必要的运算监控,强化电机控制模块的基本运行,以保证根据实际情况进行的电机助力控制以及阻尼控制。只有实现接口电路和斩波电路的合理化运行,才能实现对整体系统进行的优化控制。在汽车电动助力转向系统软件设计过程中,基本的转向设计也要符合实时性、可靠性以及可维护性,保证整体软件的设计能进行优化的调试和修改,实现有机的完善过程。并且相关管理人员要对相应汽车电动助力转向系统进行定期的数据处理和收集,保证整体软件能实现优化的补充维护结构。
4 结语
总而言之,汽车电动助力转向系统能确定基本电动机的目标电流,并对基本目标电流进行实效性的跟踪,能从根本上提升整体车辆的运行稳定度,促进车辆无论是低速还是高速都实现便捷灵活的行车特征,为驾驶人员带来更好的驾驶体验。
参考文献
[1] 王玲.基于模糊ARTMAP神经网络农用汽车助力转向系统控制[J].山东农业大学学报(自然科学版),2015,46(3).
[2] 刘俊.基于信号滤波及动态补偿的电动转向系统控制研究[J].汽车技术,2007,14(2).
[3] 刘文文.融合主动转向功能的新型汽车电动助力转向系统控制特性研究[D].重庆交通大学,2014.
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
科技创新与应用(2017年2期)2017-02-09
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
西部广播电视(2015年17期)2016-01-18
西北工业大学学报(2015年3期)2015-12-14
河南科技(2014年11期)2014-02-27
河南科技(2014年8期)2014-02-27