角加速度间接测量方法研究*
2016-06-13 08:45任如彬王皖君
传感器与微系统 2016年3期
付 晨, 任如彬, 王皖君
(南京林业大学 机械电子工程学院,江苏 南京 210037)
角加速度间接测量方法研究*
付晨, 任如彬, 王皖君
(南京林业大学 机械电子工程学院,江苏 南京 210037)
摘要:针对角加速度检测的需求和直接检测存在的问题,研究了间接测量方法。根据角加速度的积分是角速度,以角速度为信号源,运用卡尔曼滤波器估计角加速度。设计了实验平台,分别进行了角加速度阶跃变化和周期性变化实验,实验结果表明:该间接测量方法具有很好的应用价值。
关键词:角加速度; 卡尔曼滤波; 间接测量
0引言
角加速度检测在动力机械动态试验、伺服控制、负载模拟等领域中有着广泛的需求[1~3]。目前有采用流动电势法、压电晶体法和应变片法设计传感器直接测量角加速度,但还没有成熟的定型产品[4]。通常动力机械的转轴上都安装转速传感器,理论上,可以对转速微分实现角加速度间接测量,但数值微分运算会放大转速信号中的噪声,采用低通滤波处理,则会带来相位滞后,造成动态测量误差。为了提高角加速间接测量的精度和响应速度,扩张状态观测器、跟踪微分器、卡尔曼滤波器、滑模观测器等被用于估计角加速度[5~8]。其中,扩张状态观测器、跟踪微分器的参数没有明确物理意义,确定困难;卡尔曼滤波器通过递推方程,根据当前量测数据,实时给出被估计量的动态变化规律,当状态方程和测量方程为线性时,且量测噪声为零均值高斯噪声时,标准卡尔曼滤波是最小方差意义下的最优滤波算法,可以通过噪声特性矩阵的选择来调节状态估计的收敛速度,并保持系统的稳定,有较好的应用前景,但主要集中在仿真分析,实验研究比较少。
为了评估角加速度间接测量方法的有效性,本文以角速度为信号源,采用卡尔曼滤波器估计角加速度,设计实验平台,并进行实验研究。实验结果表明:该间接测量方法能有效估计角加速度,且成本低比,直接测量方法更容易实现。
1角加速度间接测量方法
角加速度定义为角速度对时间的微分

(1)
状态空间表示为
y=Cx.
(2)
其中
用一阶欧拉法把式(1)转换为离散迭代形式,近似过程中的误差可以用卡尔曼滤波器的反馈校正来补偿
xk=xk-1+Axk-1Ts=(I+ATs)xk-1,
(3)
记
考虑状态方程误差和量测噪声,被估计状态的状态方程和输出方程为
(4)
过程噪声w和量测噪声v相互独立,一般为均值为零的高斯白噪声,它们的协方差矩阵如下
E(w)=E(v)=0,
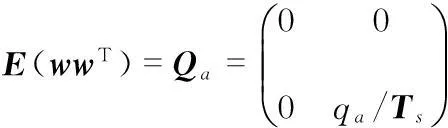
E(vvT)=Ra=ra/Ts.
先验估计误差的协方差和估计误差的协方差分别为


卡尔曼滤波的计算步骤如下

(5)

(6)

(7)

(8)

(9)
卡尔曼滤波通过递推方程,根据当前量测数据,实时给出被估计量的动态变化规律,该方法的关键在于确定过程噪声和量测噪声的统计特性,工程上,通常采用试凑的方法确定Qa和Ra。
2实验研究
为了获取变化的转速信号源和验证角加速度间接测量方法的有效性,设计了调速电机实验台进行实验研究,电机为变频调速三相异步电机,额定转速1 500 r/min,电机端部光电编码器分辨率为2 000 p/r,以TwinCAT—PLC为实时控制器,通过Profibus—DP总线控制西门子S120变频器,电机控制方式配置为带编码器闭环矢量控制,实现转速的任意调节,转速信号由实时控制系统通过现场总线读取S120变频器,间接测量方法的计算周期为1ms,数据采集和显示由软示波器(TwinCAT ScopeView)完成,实验系统框图如图1所示,分别进行了角加速度阶跃变化、周期性变化两组实验,并分析角加速度估计结果与理想角加速度的一致性。

图1 实验系统框图Fig 1 Block diagram of experimental system
角加速度阶跃变化实验时,激活斜坡函数发生器,并分别设置加速时间为10s、减速时间为5s,则电机在变频器控制下以恒定的角加速度做加速或减速运行,加速过程中角加速度从0阶跃到15.7rad/s2、减速过程中的角加速度从0阶跃到-31.4rad/s2。角加速度周期性变化实验时,禁用斜坡函数发生功能,转速给定信号以频率为1Hz、幅值为200r/min正弦变化,由于转速幅值或频率再增加时,角加速度会很大,为防止机械冲击、变频器过载等故障出现,且实际应用中一般也不会出现这种工况,故没有进行更大幅值或更高频率的实验[9]。实验过程中主要采集转速信号、估计的角加速度信号和近似的理想角加速度信号。由于实际转速与给定转速基本一致,但实际转速含有一定的测量噪声而数字给定信号除了量化误差外基本不含噪声,因此,通过对给定转速进行差分运算获得近似理想的角加速度。
卡尔曼滤波器参数q取0.0005、r取0.01时,角加速度阶跃变化时的间接测量结果如图2所示,在4.5s左右角加速度波动是由转轴摩擦特性的变化造成的;角加速度周期性变化时的间接测量结果如图3所示,从图中可以看出,间接测量曲线基本与理想值重合。实验结果表明:在选取合适的参数情况下,角加速度估计结果的相位滞后已经很小,能满足多数应用要求。

图2 角加速度阶跃变化时的实验结果Fig 2 Experimental results of angular acceleration step variation
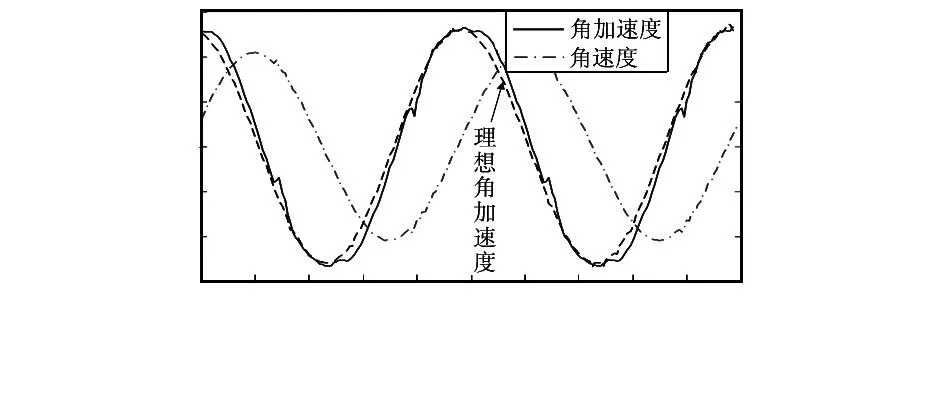
图3 角加速度周期性变化时的实验结果Fig 3 Experimental results of angular acceleration periodic variation
3结束语
本文实验结果表明:基于卡尔曼滤波器的间接测量方法具有良好的动态估计性能和参数适应性,这是因为这种方法根据运动学规律来估计角加速度,参数确定与信号及其变化的范围无关,适应性较强,而且算法实现简单,具有很好的工程应用价值。
参考文献:
[1]蔡艳平,李艾华,胡重庆,等.平稳小波自适应去噪用于曲轴瞬时角加速度测[J].振动、测试与诊断,2010,30(3):310-314.
[2]刘国福,张屺,王跃科.基于FIR滤波器的ABS轮加速度信号计算方法研究[J].武汉理工大学学报:交通科学与工程版,2006, 30(5): 902-904.
[3]郭鸿浩,周波,刘颖.永磁无刷直流电机角加速度估计[J].电工技术学报,2014,29(5):93-103.
[4]费维,刘正士,郑传荣.几种角加速度传感器的工作原理及其应用[J].机床与液压,2005 (1):145- 146.
[5]李殿起,薛定宇,崔建国,等.一种新型的速度和加速度估计器[J].系统仿真学报,2008,20(15):4132-4135.
[6]张志利,李祥州,成跃.基于轴角编码器二阶跟踪微分的角加速度测量[J].计测技术,2008,28(4):28-30.
[7]Han J D,He Y Q,Xu W L.Angular acceleration estimation and feedback control: An experimental investigation [J].Mechatro-nics,2007,17(9):1-9.
[8]邓红星,王宪彬,刘咔.角加速度边界层观测器设计[J].哈尔滨工业大学学报,2010,42(9):1504-1508.
[9]杨雪松,李长春,母东杰,等.正弦激励法在传感器校准中的新应用[J].传感器与微系统,2014,33(7):154-156.
Research of angular acceleration indirect measurement method*
FU Chen, REN Ru-bin, WANG Wan-jun
(College of Mechanical and Electronic Engineering,Nanjing Forestry University,Nanjing 210037,China)
Abstract:In order to satisfy the requirement of angular acceleration measurement and solve the problem of direct detection,indirect measurement method is researched.As integration of angular acceleration is angular velocity,the latter is selected as signal source; Kalman filter is adopted to estimate angular acceleration.Experimental plat form is designed,step change of angular acceleration periodic change,and results indicate that the indirect measurement approach has good application value.
Key words:angular acceleration; Kalman filtering; indirect measurement
DOI:10.13873/J.1000—9787(2016)03—0030—02
收稿日期:2015—06—08
*基金项目:大学生实践创新训练计划资助项目;南京林业大学高学历人才科研启动基金资助项目
中图分类号:TN 41
文献标识码:A
文章编号:1000—9787(2016)03—0030—02
作者简介:
付晨(1994-),男,江苏苏州人,主要研究领域为检测技术与仪器。
王皖君,通讯作者,E—mail:wwjseu@qq.com。
猜你喜欢
液压与气动(2020年4期)2020-04-10
电子技术与软件工程(2019年5期)2019-06-20
测控技术(2018年12期)2018-11-25
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
北京航空航天大学学报(2017年9期)2017-12-18
电测与仪表(2016年18期)2016-04-11
电源技术(2016年9期)2016-02-27
振动与冲击(2015年3期)2015-12-30
电测与仪表(2015年24期)2015-04-09