一种基于六姿态模型的加速度计校准方法研究
2016-06-13 08:45张文瑞张丕状翟子雄
传感器与微系统 2016年3期
张文瑞, 张丕状, 翟子雄
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
一种基于六姿态模型的加速度计校准方法研究
张文瑞, 张丕状, 翟子雄
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
摘要:MEMS 加速度计和陀螺仪是惯性导航系统的重要测量组件。为提高惯性导航系统的测量精度,在使用加速度计前需要对其各项参数进行标定。在构建了一种理想的三轴MEMS加速度传感器输出与重力加速度值、零偏、标度因子之间的模型基础上,根据加速度计在静止状态下重力加速度在各轴分量的模值与重力加速度的关系,提出了一种零偏和标度因子的六姿态校准方法,并建立了标定方程。以MPU6050加速度陀螺仪为例,通过实验验证了该方法的正确性。结果表明:通过该校准方法可以有效地提高加速度传感器的零偏和标度因子技术指标精度。
关键词:MEMS加速度计; 零偏; 标度因子; 姿态校准
0引言
MEMS惯性器件以其结构简单、低成本、小体积等优势在太空、工业机器人及汽车领域取得了广泛的应用。但是MEMS惯性器件的精度指标与其他同类传感器的精度相比要低得多,制约了它的进一步的应用。目前,对三轴零偏和标度因子进行校准已经成为一个研究热点[1,2]。
MEMS加速度计的主要技术指标有零偏和标度因子。由于批量生产工艺等方面的原因,产品的一致性不易精确控制,厂家给出的技术指标较低,难以满足一些高精度测量的需要,故对加速度计的各项系数进行标定非常重要。目前普遍采用三轴转台上进行标定陀螺和加速度计[3],大量的研究集中在标定算法的解算上[4]。这些方法以精密转台为实验平台,进行翻滚获取被标定传感器的实验数据,利用转台上的参考加速度计的姿态指向等信息,通过各种解算算法完成传感器标定。该方法可以实现对加速度传感器的综合指标进行标定,但对设备的精度和转台的姿态转向精度要求较高,操作复杂且费时,另外还有粒子种群算法的复杂性等问题[5~7]。
本文提出了一种采用静态任意六姿态位置的实验数据对加速度计三轴零偏和标度因子进行校准[8]。这种方法避免使用转台等设备,而且无需任何的参考传感器,具有速度快,效率高的优点。
1虚拟加速度传感器的数学模型与输出算法仿真
1.1虚拟的三轴MEMS加速度计模型建立
根据MEMS加速度计的工作原理[9],虚拟一种三轴传感器,各轴的重力加速度分量、标度因子、零偏的输出数学误差模型如下
(1)
式中kx,ky,kz分别为MEMS加速度计X,Y,Z三轴的标度因子;datax,datay,dataz分别为MEMS加速度计三轴的输出值;offsetx,offsety,offsetz分别为加速度计三轴的零偏;gx,gy,gz分别为重力加速度在X,Y,Z三轴的分量。
设三轴的标度因子、零偏为六个定数。对于所有的静止姿态,根据力学分解原理,MEMS加速度计的重力加速度在各轴的输出值满足如下关系
(2)
且满足

(3)
将式(1)、式(2)代入式(3),得到

(4)
1.2在不同静止姿态下的输出仿真
MEMS加速度计的姿态均可用三个姿态角描述:θ为绕X轴旋转为俯仰角;γ为绕Y轴旋转为翻滚角;Ψ为绕Z轴旋转为航向角可任意设置。传感器姿态之间可用如下的坐标变换表示。设初始坐标系为地理坐标系n:O—XnYnZn(Xn指东,Yn指北,Zn指天),其绕Z轴旋转角度Ψ可得到坐标系1:O-X1Y1Z1(Zn)[10]。其变换矩阵可表示为
从坐标系1:O-X1Y1Z1(Zn)绕X轴旋转角度θ得到坐标系2:O-X2Y2Z2的变换矩阵

从坐标系2:O-X2Y2Z2绕Y轴旋转角度γ得到坐标系b:O-XbYbZb的变换矩阵
所以,MEMS加速度计的空间姿态矩阵C为

MEMS加速度计处于静止状态时,重力加速度在X,Y,Z三轴的输出
[gxgygz]T=C[00g]T,
(5)
式中T为矩阵转置。
不失一般性,假设虚拟MEMS加速度计的零偏和标度因子分别为
offsetx=600,kx=0.11,
offsety=620,ky=0.12,
offsetz=580,kz=0.13.
设该地区的重力加速度为1 000 mgn。
为不失一般性,选取六组姿态角如表1所示。
表1 MEMS加速度计静止时的任意六位置
将上述数据代入式(5),计算结果代入式(2)可得到三轴分量的输出值datax,datay,dataz, 如表2所示。
表2 加速度计静止状态时的输出值
2参数的标定模型与仿真验证
2.1零偏和标度因子参数的标定模型
为了标定三轴MEMS加速度计的零偏和标度因子参数,现将加速度计三轴分量的输出值datax,datay,dataz作为已知数据,把零偏和标度因子看作未知参数。根据式(4),解算出MEMS加速度计的六个未知参数offsetx,offsety,offsetz,kx,ky,kz,需要有六个满足式(4)的数据。为此,选取表1中的六个姿态下对应的表2中的输出值,带入式(4),得到六个方程组。从而形成了该虚拟三轴MEMS加速度计的零偏和标度因子参offsety数的标定模型。
为验证该标定模型的正确性,采用牛顿迭代法验证该模型具有唯一解。
为此,得到雅可比矩阵为

2.2仿真验证
图1和图2是通过牛顿迭代法解算出的加速度计的零偏和标度因子。
从图1和图2可以看出:迭代结果与前面设定的传感器的零偏和标度因子保持一致,且收敛速度快,效果好。当更换新的一组表1的姿态角后,其他条件不变,重复上述操作,仍然可以得到同样的结果,由此可以验证算法的正确性,也证实了当初假设的加速度计的数学模型是成立的。
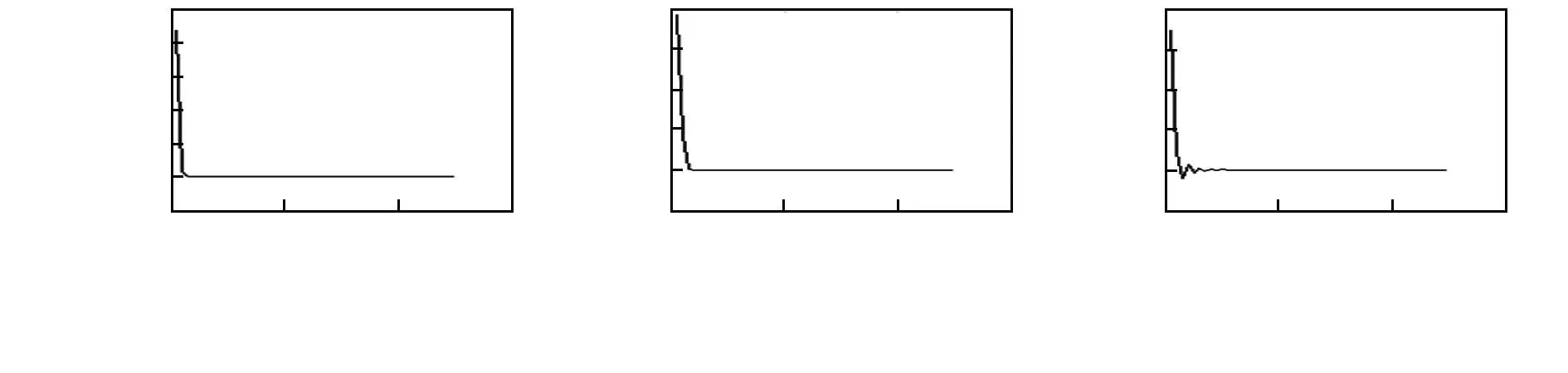
图1 零偏的仿真结果Fig 1 simulation result of bias
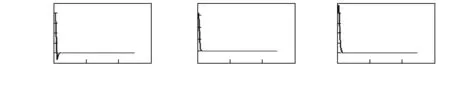
图2 标度因子的仿真结果Fig 2 Simulation result of scale factor
3实验验证
为验证上述模型可适合于实际的三轴MEMS传感器,实验采用MPU6050加速度陀螺仪,在加速度计静止状态下测得其在六个不同姿态下的六组不同的输出值datax,datay,dataz,每组值经过中值滤波处理,代入式(4)得到六个方程,利用牛顿迭代法解算出加速度计的零偏和标度因子。多次改变加速度计的六个姿态,可得到加速度计的多组零偏和标度因子值。选取任意两组有代表性的实验结果分析如表3所示。
分别解算各自的方差,然后与MPU6050给出的加速度计的零偏和标度因子技术指标(标度因子初始标定误差±3 %;X,Y轴零偏初始标定误差±50 mgn,Z轴零偏初始标定误差±80 mgn)比对,X轴零偏误差缩小到22.5 mgn,标度因子误差缩小在-0.15 %~0.5 %;Y轴零偏误差缩小到8.2 mgn,标度因子误差缩小在0.25 %~1.3 %;Z轴零偏误差缩小到37.83 mgn,标度因子误差缩小在-1.85 %~0.43 %。传感器精度明显得到改善。
4结束语
仿真结果证明了本文提出的数学模型的正确性,采用MEMS加速度计的任意六位置就可快速标定其零偏和标度因子,相比在转台上的标定操作,方法简单易行,同时也减少了由于转台安装等因素引起的误差对精度标定过程的影响。该方法可用于对其他传感器的参数进行标定。另外,加速度计静态时的各个姿态的选取是任意的,旋转角度任意,不必具体确定加速度计的摆放角度[11]。这种方法只是对加速度计的零偏和标度因子进行简单标定,没有考虑三轴之间的非正交关系,温度、环境、噪声等因素的影响。为了进一步提高MEMS加速度计的精度,这也是以后要深入研究的重要问题。
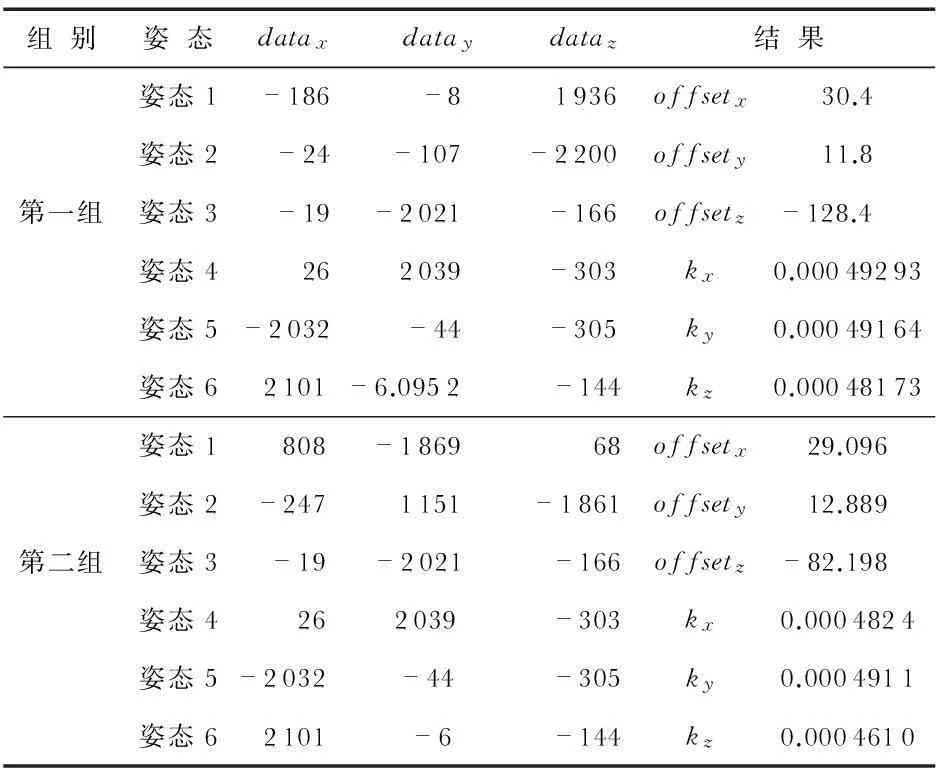
表3 不同姿态下加速度计的两组零偏和标度因子标定结果
参考文献:
[1]宋丽君,秦永元.MEMS加速度计的六位置测试法[J].测控
技术,2009(7):11-13.
[2]彭承明.曾占魁.舒嵘.等. 静电加速度计标度因数和零偏误差标定[J].中国惯性技术学报,2009,17(5):582-585.
[3]李杰,洪惠惠,张文栋.MEMS微惯性测量组合标定技术研究[J].传感技术学报,2008(7):1169-1173.
[4]Fong W T,Ong S K,Nee A Y C.Methods for in-field user calibration of an inertial measurement unit without external equipment[J].Measurement Science & Technology,2008,19(8):817-822.
[5]邱浩阳,虞水俊.惯导平台加速度计静态多位置模观测标定方法[J].导航与控制,2013,12(2):63-67.
[6]戴邵武,王克红,钱俭学.基于AKPSO算法的加速度计快速标定方法[J].传感器与微系统,2015,34(2):69-72.
[7]戴邵武,万龙,徐胜红.基于迭代计算的加速度计标定方法[J].舰船电子工程,2014(1):63-65.
[8]Paris B,Bahrami M,Esfahani A,et al.Calibration verification of a low-cost method for MEMS accelerometers[J].IEEE Transaction of the Institute of Measurement and Control,2014,36(5):579-587.
[9]赵翔,杜普选,李虎,等.基于MEMS加速度计和陀螺仪的姿态检测系统[J].铁路计算机应用,2012,21(3):15-18.
[10] 秦永元.惯性导航[M].北京:科学出版社,2006:5-8.
[11] Frosio I,Pedersini F,Borghese N A.Autocalibration of MEMS accelerometers[J].IEEE Transaction of the Institution of Measurement and Control,2009,58(6):2034-2041.
Research on an accelerometer calibration method based on six-posture model
ZHANG Wen-rui, ZHANG Pi-zhuang, ZHAI Zi-xiong
(Key Laboratory of Instrumentation Science & Dynamic Measurement, Ministry of Education,North University of China,Taiyuan 030051,China)
Abstract:MEMS accelerometer and gyro are important measurement components of inertial navigation system(INS).In order to improve measurement precision of INS,it is necessary to calibrate its various parameters before using accelerometer.On the basis of construction of an ideal model between output of three-axis MEMS acceleration sensor,gravity acceleration values, zerobias and scale factor,according to relationship between modulus value of the acceleration of gravity in each axis component and gravity when accelerometer is in stationary state,propose a six-posture calibration method of zero-bias and scale factor,and establish calibration equation.The method is proved to be correct through experimental verification taking MPU6050 acceleration gyroscope as example.The results show that the callbration method can effectively improve precision of technical indicators of acceleration sensor such as zero-bias and scale factor by the calibration method.
Key words:MEMS accelerometers; zero bias; scale factor; posture calibration
DOI:10.13873/J.1000—9787(2016)03—0037—03
收稿日期:2015—06—29
中图分类号:V 249
文献标识码:A
文章编号:1000—9787(2016)03—0037—03
作者简介:
张文瑞(1991-),女,山西吕梁人,硕士研究生,主要从事信号处理。