基于低频唤醒和极限学习机的无线定位系统
2016-06-13 08:43张天承
传感器与微系统 2016年3期
张天承
(清华大学 自动化系,北京 100084)
基于低频唤醒和极限学习机的无线定位系统
张天承
(清华大学 自动化系,北京 100084)
摘要:设计了一种基于低频(LF)唤醒技术和极限学习机(ELM)分类算法的无线定位系统。实现了低频唤醒、射频应答的电路结构和通信回路,实现了有源应答器的超低待机监听。通过比较各类型的多种射频定位算法,选用基于ELM分类的定位算法,对低频唤醒接收信号强度指示(RSSI)数据进行分类并实现定位,有效降低了定位算法在线阶段的计算量,在单片机系统中实现了实时定位计算。测试结果表明:定位系统在有效范围内定位精度可达15 cm,定位正确率可达95 %以上,在定位精度和稳定性方面明显优于超高频(UHF)频段射频定位系统。
关键词:无线定位; 低频唤醒; 极限学习机; 接收信号强度指示
0引言
随着电子信息和物联网技术的发展,室内定位在商业、工业、服务业等众多领域有着越来越突出的需求[1]。发展至今,射频通信技术和接收信号强度(RSS)检测成为了室内定位技术的主要技术手段[2~4]。多数定位系统使用超高频(UHF)频段信号的接收信号强度指示(RSSI)进行定位,UHF频段信号强度容易受到墙体、人体和其他遮挡物影响,从而降低了定位准确性。虽然有学者提出了各种改进方法[5~8],但未能消除信号自身性质对定位准确性的影响。与UHF频段相比,低频(LF)信号波长更长,近场通信更加稳定,不易受遮挡影响,且强度随距离衰减明显,有利于获得更高的定位精度。
另一方面,当前定位系统中的定位算法多数都由后台计算机完成,难以在计算能力相对有限的单片机等嵌入式平台上实现,影响了系统的适应性。
本文综合分析各种定位方案,综合考虑各频段信号特点,比较各类算法的优缺点,提出了基于低频唤醒和分类算法的定位系统,以125 kHz低频唤醒通信技术为硬件基础,以极限学习机(ELM)[9~11]分类器为定位算法,在单片机平台上实现对有源定位标签的实时定位。
1系统结构
定位系统结构如图1所示。系统包含唤醒器、应答器(即定位标签)和接收终端。进行定位时,首先由唤醒器发送125 kHz唤醒报文,唤醒范围内的应答器被唤醒,采集唤醒信号RSSI等相关数据,通过433 MHz频段发送至接收终端。接收终端接收数据包,解析、收集数据,并运行定位算法获得定位结果。
1.1唤醒器结构
唤醒器用于发射唤醒报文。唤醒器需保证报文格式正确、发射波形频率准确、幅值稳定,以保证有效范围内的应答器能够被可靠唤醒、测量到稳定的RSSI数值、解调出正确的数据。
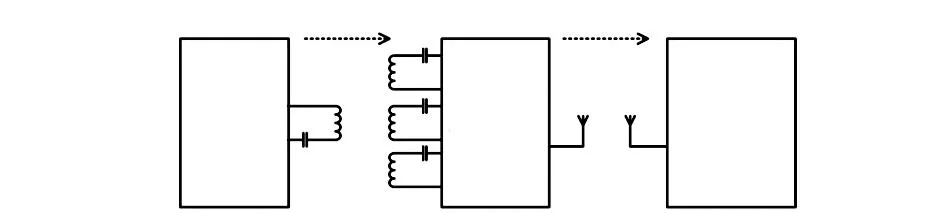
图1 定位系统结构图Fig 1 Structure of positioning system
唤醒器的结构如图2所示。由串行报文信号对定时器形成的4路125 kHz同步载波信号进行调制,经H桥驱动LC串联谐振线圈进行发射。报文包含载波头、前导码、唤醒识别码和用户数据(例如唤醒器ID等),报文串行信号与发射线圈谐振波形的对应关系如图3所示。
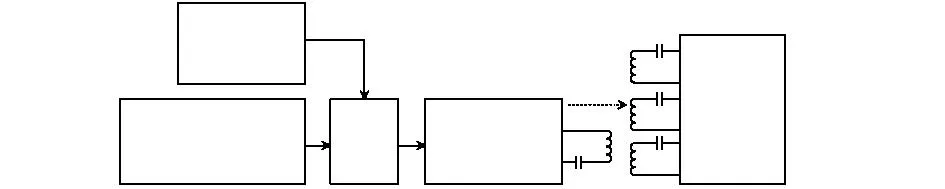
图2 唤醒器结构Fig 2 Structure of initiator

图3 报文信号与谐振波形对应关系Fig 3 Correspondence relationship between message signal andresonance wave form
1.2应答器结构
应答器用于接收唤醒报文并通过UHF通信做出应答。在收到正确的唤醒报文后,应答器需要验证唤醒识别码、测量RSSI、解调用户数据并发送应答数据包。
应答器分为低频唤醒部分、数据处理部分和射频应答部分。低频部分使用专用的三轴正交线圈组成LC并联谐振电路接收信号,使用专用的低频唤醒接收芯片AS3933测量3路RSSI、验证唤醒识别码和解调数据。使用3组方向正交的线圈可以更准确地体现RSSI,并保证至少1组线圈能够获得足够的信号强度来解调数据。数据处理和应答部分使用TI公司的CC430系列单片机,通过2路SPI串口分别完成读写寄存器(包括RSSI)和接收解调数据;通过内嵌的CC1101射频通信模块,将收集的数据发送至接收终端。
本系统中使用主动式应答器,AS3933芯片在监听状态下最低电流为2.3 μA,处理器休眠电流最低0.9 μA,实现了超低功耗待机;应答通信过程电流约15 mA,持续时间约1.6 ms,整体耗电量较少,保证了应答器电池的续航时间。
1.3接收终端结构
接收器用于接收应答器发送的数据包,解析和收集其中的数据,并执行定位算法。接收器使用CC1101射频芯片接收应答数据,使用RX361系列32位单片机读取数据和执行定位算法。定位时需要获取应答器接收不同位置的多路唤醒信号的RSSI数据,接收终端需在确认数据齐全的条件下执行定位算法。
2定位算法
本系统选用基于分类的定位算法,以低频唤醒信号的RSSI为基础数据,根据定位精度的需求,将空间进行若干划分,划分出的每一个小空间视为一类,使用样本数据训练分类器,再对测试数据进行分类实现定位。相比基于RSSI指纹比对的方法,基于分类的方法不需要在实际定位阶段逐一比对所有数据样本,而是在训练过程分中利用全部训练样本训练分类器;定位阶段计算量不受样本数量影响,由分类器结构决定,计算量更加可控,适用于本系统。
本系统选用ELM算法作为分类算法。ELM算法由Huang G B提出,是一种基于单隐层前馈神经网络的学习算法[9]。相比BP算法、SVM算法等分类算法,ELM算法具有更短的训练时间和更高的分类正确率[9]。算法结构模型如图4所示,图中,x和o分别为输入数据(本系统中为RSSI向量)和分类输出向量,n和m分别为输入维度和分类数,隐层节点数L根据分类问题的实际情况选取,各隐层节点的输入权重w和偏置系数为随机选取,仅输出权重β待定。输出向量中每个输出值的计算方法如式(1),输出向量中数值最大一项即对应分类结果[9~11],即
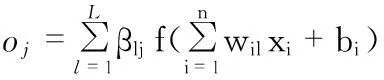
(1)
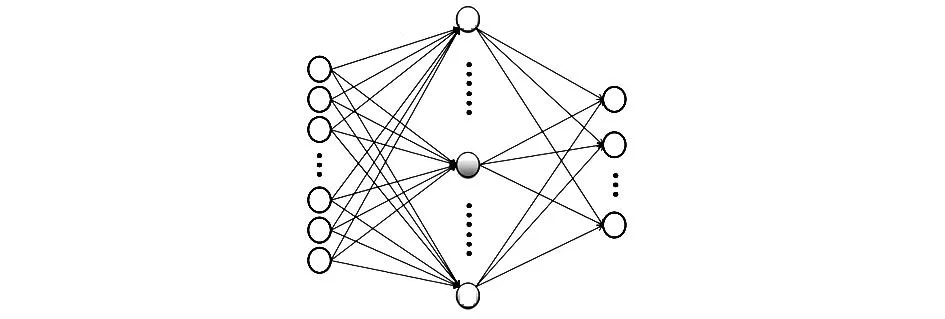
图4 ELM算法结构Fig 4 Structure of ELM algorithm
使用N个训练样本〈Xi,Ti〉(i=1,2,…,N)对算法进行训练时,可以使用矩阵的方式重写式(1)为式(2),并得到输出权重矩阵的计算式(3)

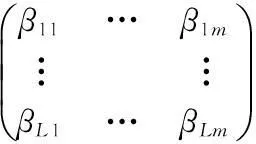
(2)
β=H+T.
(3)
由式(3)计算出的输出权重矩阵,可使分类器对训练样本达到最小错误率,同时使得输出权重系数的标准差达到最小[10]。由于训练过程只调整输出权重矩阵,且通过求解广义逆矩阵直接计算出输出矩阵而不使用迭代,可以明显缩短算法的训练时间;训练结果达到最小错误率和输出权重最小标准差,保证了算法在定位阶段的正确率和推广性[9,10]。
3测试结果与分析
3.1测试方案
定位测试时使用4路唤醒天线依次发送唤醒信号,应答器测量唤醒信号RSSI并应答,由接收终端收集数据样本。4路唤醒天线位于4.5 m×3 m定位区域四周,区域中央位置以15 cm间距划出5×5正方形网格,形成25个测试点位,应答器在每个测试点位上以不同角度进行采样;接收器将全部数据按照测试点位分成25组,使用样本数据的90 %作为训练样本,其余10 %作为测试样本。
定位情景分为两种:全部25个测试位点定位;选取 2×5的测试区域,沿纵向分为两区,进行区域的定位。
3.2实验结果
基于ELM的定位算法在两种定位情景中的定位正确率与隐节点数量关系如表1所示。基于ELM的定位算法在两种定位情景下均能达到较高的正确率。
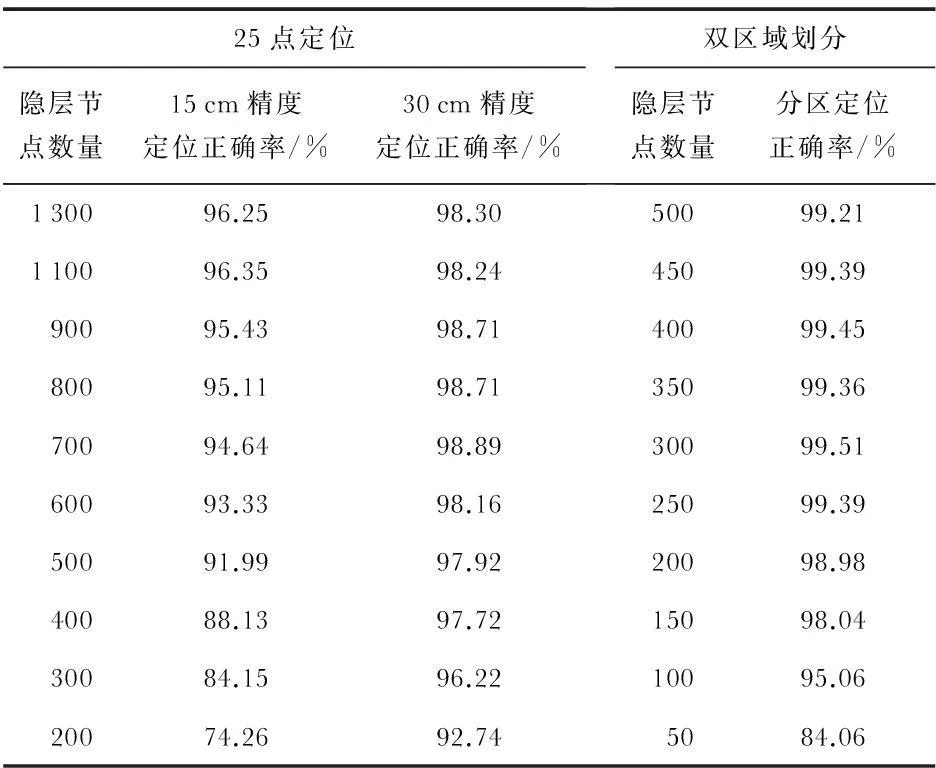
表1 ELM算法定位正确率
基于ELM的定位算法除了具有较高的定位正确率外,在算法运算量上也具有优势。基于ELM的定位算法和基于指纹匹配的算法在计算量相近情况下的定位正确率情况如图5所示。由图5可知:相比于指纹匹配算法,ELM算法在较低运算量的情况下即可达到较好的定位正确率,定位效果优于同等计算量下的指纹匹配算法。
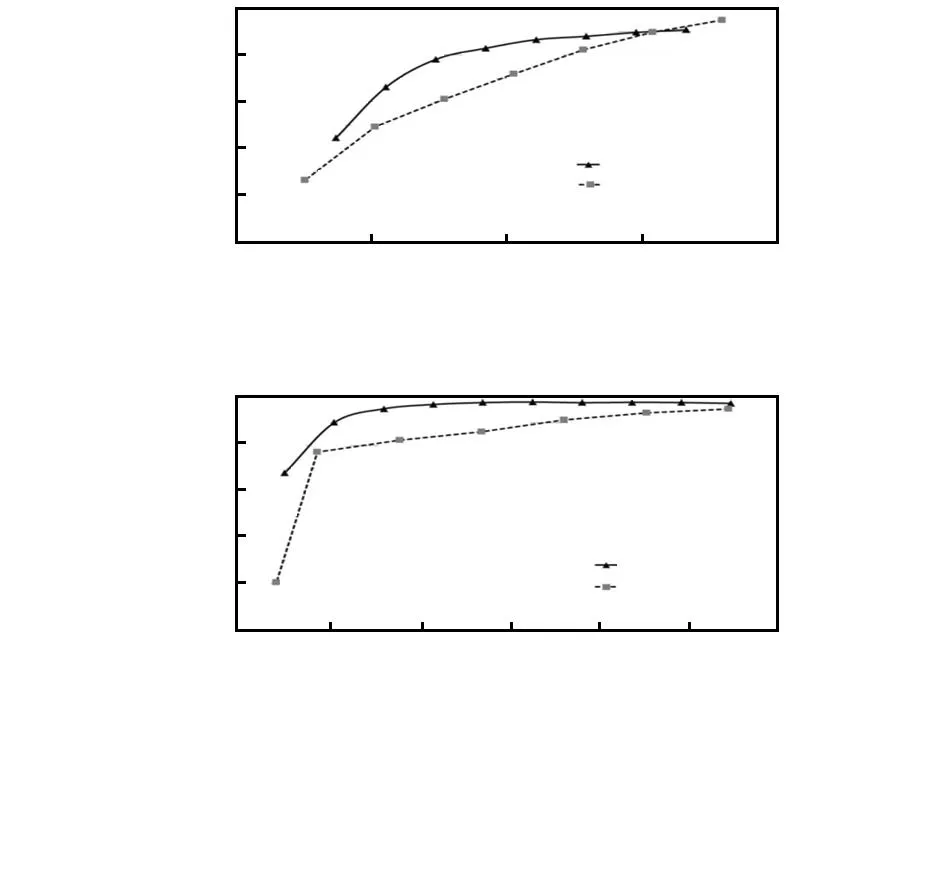
图5 ELM算法与指纹匹配算法在同等运算量下的正确率比较Fig 5 Accuracy comparison between two algorithmsunder similar amount of calculation
4结论
经测试验证,本文提出的基于125 kHz低频唤醒和ELM分类算法的定位系统可实现较高的定位精度和正确率。定位系统在算法计算量相对较低的情况下即可实现较好的定位效果。定位系统可在单片机等嵌入式平台上实现,现场实施更加灵活方便,在小范围高精度定位方面有较好的应用前景。
参考文献:
[1]杜锋,田世伟,李广侠.WLAN定位综述[C]∥第五届中国卫星导航学术年会论文集,2014.
[2]Ni L M,Liu Y,Lau Y C,et al.LANDMARC: Indoor location sensing using active RFID[J].Wireless Networks,2004,10(6):701-710.
[3]武亚鹏.基于RFID双频段定位系统天线设计[D].西安:西安电子科技大学,2014.
[4]王沛.基于多频RFID组合定位系统设计与应用[D].西安:西安电子科技大学,2014.
[5]王曙光.无线传感器网络的分区域质心定位算法[J].传感器与微系统,2014, 33(12):149-151.
[6]项亚南,潘丰.一种基于无线传感器网络的加权阈值质心定位算法[J].传感器与微系统,2014,33(9):104-106.
[7]徐俊俊.基于射频指纹匹配的高精度鲁棒定位技术的研究与验证[D].北京:北京邮电大学,2013.
[8]孙中廷,华钢,黄金城.基于进化理论的无线网络室内定位算法[J].传感器与微系统,2014,33(9):132-134.
[9]Huang G B,Zhu Q Y,Siew C K.Extreme learning machine:A new learning scheme of feedforward neural networks[C]∥Proceedings of 2004 IEEE International Joint Conference on Neural Networks,IEEE,2004:985-990.
[10] Huang G B,Zhu Q Y,Siew C K.Extreme learning machine:Theory and applications[J].Neurocomputing,2006,70(1):489-501.
[11] Huang G,Huang G B,Song S,et al.Trends in extreme learning machines:A review[J].Neural Networks,2015,61:32-48.
Wireless positioning system based on LF wake-up and ELM
ZHANG Tian-cheng
(Department of Automation,Tsinghua University,Beijing 100084,China)
Abstract:A wireless positioning system based on low-frequency(LF)wake-up and ELM classification algorithm is designed.The circuit and communication loop for LF wake-up and RF response is designed,and listening of transponder with ultra-low power consumption is achieved.By comparing numeral RF positioning algorithms,select ELM-based classification positioning algorithm,LF wake-up RSSI data is classified and located,effectively reduce amount of computations at on-line stage of algorithm, realtime positioning computation is realized on MCU systems.Test result shows that the positioning precision in effective range can reach 15 cm,correctness rate of positioning is positioning is over 95 %,it is prior to UHF RF positioning systems in positioning precision and stability.
Key words:wireless positioning; LF wake-up; ELM; RSSI
DOI:10.13873/J.1000—9787(2016)03—0102—03
收稿日期:2015—05—07
中图分类号:TP 212.9
文献标识码:A
文章编号:1000—9787(2016)03—0102—03
作者简介:
张天承(1989- ),男,北京人,硕士,主要研究方向为嵌入式系统应用。