基于磁传感器的磁近炸引信探测系统设计
2016-06-13 08:43祝豪杰秦会斌
传感器与微系统 2016年3期
祝豪杰, 秦会斌
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州 310018)
基于磁传感器的磁近炸引信探测系统设计
祝豪杰, 秦会斌
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州 310018)
摘要:基于磁传感器的磁近炸引信探测系统,适用于非接触探测系统。以提高探测的范围和稳定性为目的,设计了可控放大滤波电路和复位置位电路等。为提高探测的时效性和精确性,提出了改进型的滤波算法、检测算法等方法。优化改进后的系统具有良好的稳定性和适应性,能够有效探测到铁磁性物体的移动,论证了方案的可行性,为后续研究奠定了基础。
关键词:磁近炸引信; 可控放大滤波电路; 滤波算法; 检测算法
0引言
传统的引信引爆方式主要采用瞬间触发的方式,如,目标物体踩到地雷,空投导弹等,这种引爆条件简单但效果不理想,埋入地面的弹药不能造成毁伤。在这种背景下,人们开始寻求不需要接触目标,同时又能在相对于目标的最佳位置引爆的引信,即近炸引信。德国最早在20世纪30年代开始研究近炸引信,随后前苏联、美国、日本等国家相继开始进行近炸引信的研究[1]。近炸引信一般由探测系统、信号处理系统和引爆系统组成,它的工作原理是,利用探测系统对目标源进行检测并把得到的物理场信号转换成电信号,传递给信号处理系统,通过信号处理系统的判断是否引爆[2]。国内外的磁引信技术多用于精确制导导弹上,用于对导弹的姿势方向进行修正[3],基于磁传感器的探测系统,常用于车辆检测[4]。
本文设计了基于磁传感器的引信系统,探测的目标相对于车辆要小很多,例如:大型的枪械类武器。
1磁近炸引信的工作原理
系统磁传感器为霍尼韦尔公司的HMC1001。磁传感器能够将磁场信号转换成电信号,当该区域出现铁磁材料构成的物体时,附近磁场就会发生变化,导致磁传感器输出的电信号发生改变。它依据磁阻效应,在给镍铁导磁合金通电的情况下,施加一个垂直于电流方向的磁场,合金的电阻会会发生变化[5],如图1所示。
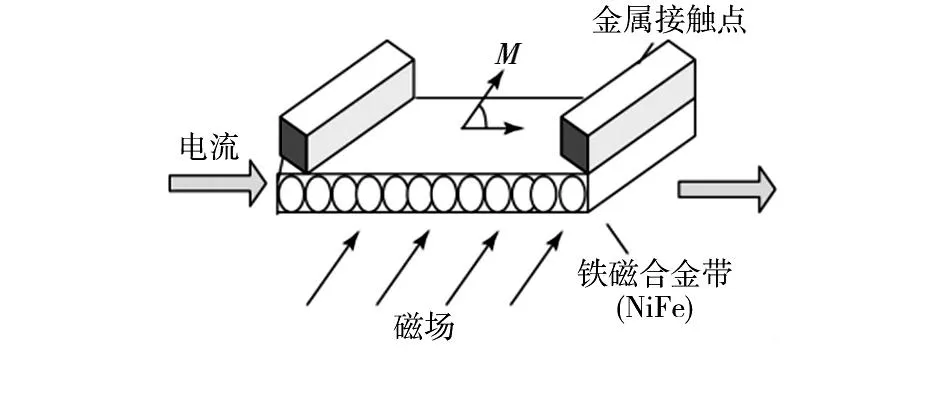
图1 磁传感器工作原理Fig 1 Operating principle of magnetic sensor
2系统框架设计
硬件框图如图2所示。磁阻传感器将得到的弱磁场信号转换成电信号,传递给一级放大电路,再经过耳机反馈放大,得到放大信号传递给单片机采样处理,最后通过单片机点亮LED代替引爆信号。
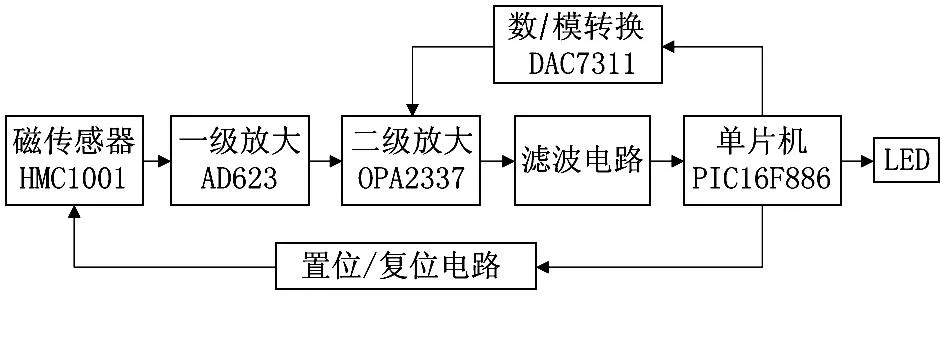
图2 系统硬件框图Fig 2 Hardware block diagram of system
2.1放大电路设计
HMC1001的输出信号为差模信号,但含有大量的共模信号,设计时使用仪表放大器芯片AD623来抑制共模信号。AD623具有高共模抑制比,能够有效抑制共模信号,具有优秀的失真性能[6]。典型电路图如图3(a)所示,增益大小可以通过电阻R控制。
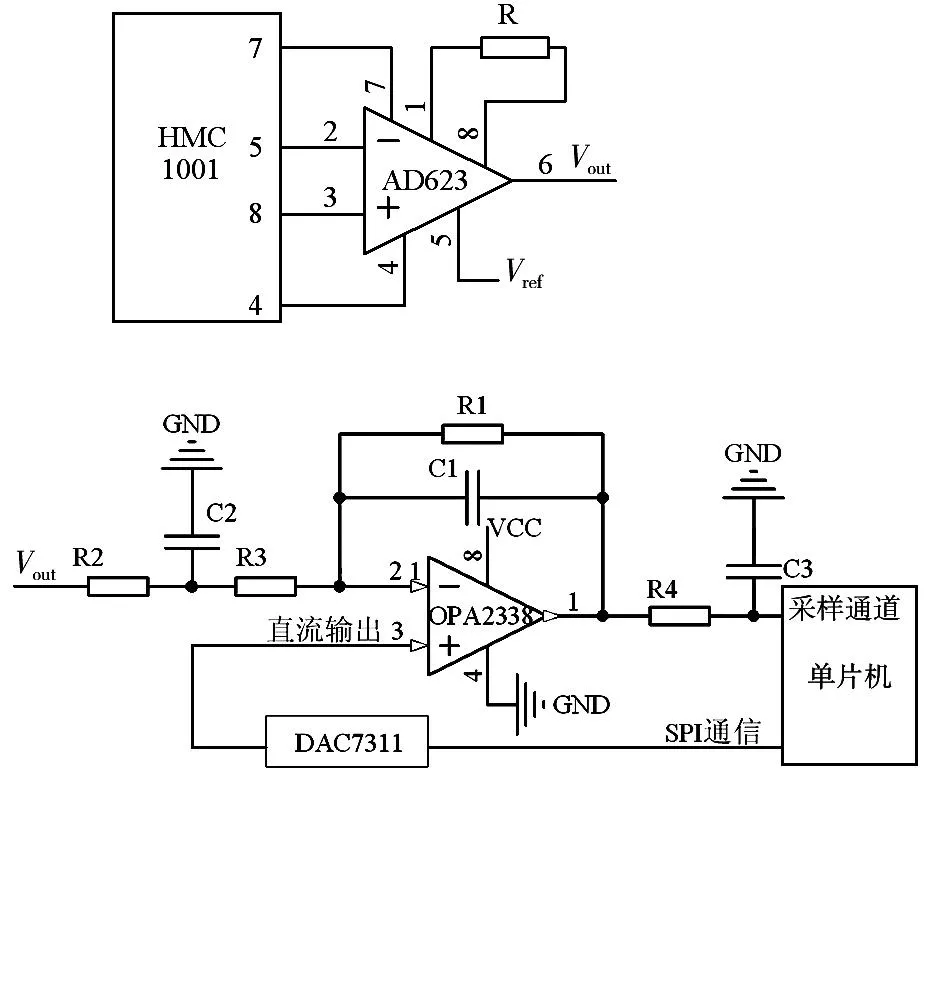
图3 一级放大电路和二级放大电路设计Fig 3 Design of level 1 amplif circuit and second ary amplifier circuit
如图3(b)所示,二级放大的电压经过滤波电路后,给单片机进行采样,根据采样电压的大小来控制DA芯片的输出,直到采样电压稳定在电压幅值的中段,单片机选用PIC16F886 ,它自带10位的AD采样。
2.2置位复位电路设计
磁阻传感器在受到磁场强度大于5 Gs时,输出信号会严重变形。为减少这种影响,需要利用磁开关技术来消除过去磁历史的影响。传感器有一条S/R电流带,只需要给与高于4 A、脉宽大于2 μs的脉冲电流,就可以重新对准磁区域方向,恢复传感器的灵敏度[7]。复位电路如图4所示,复位信号由单片机提供。
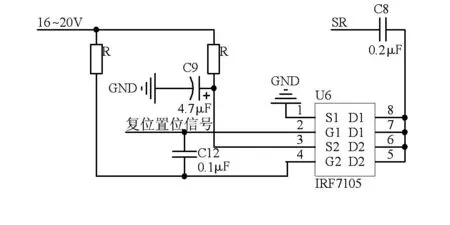
图4 置位复位电路Fig 4 Set-reset circuit
3系统软件设计
整个系统功能通过硬件和软件的配合实现,软件部分包括单片机采样功能、置位复位信号、二级放大反馈程序设计、滤波算法和检测算法[8]等。其中,滤波算法和检测算法是本系统软件设计的关键,其流程图如图5所示。
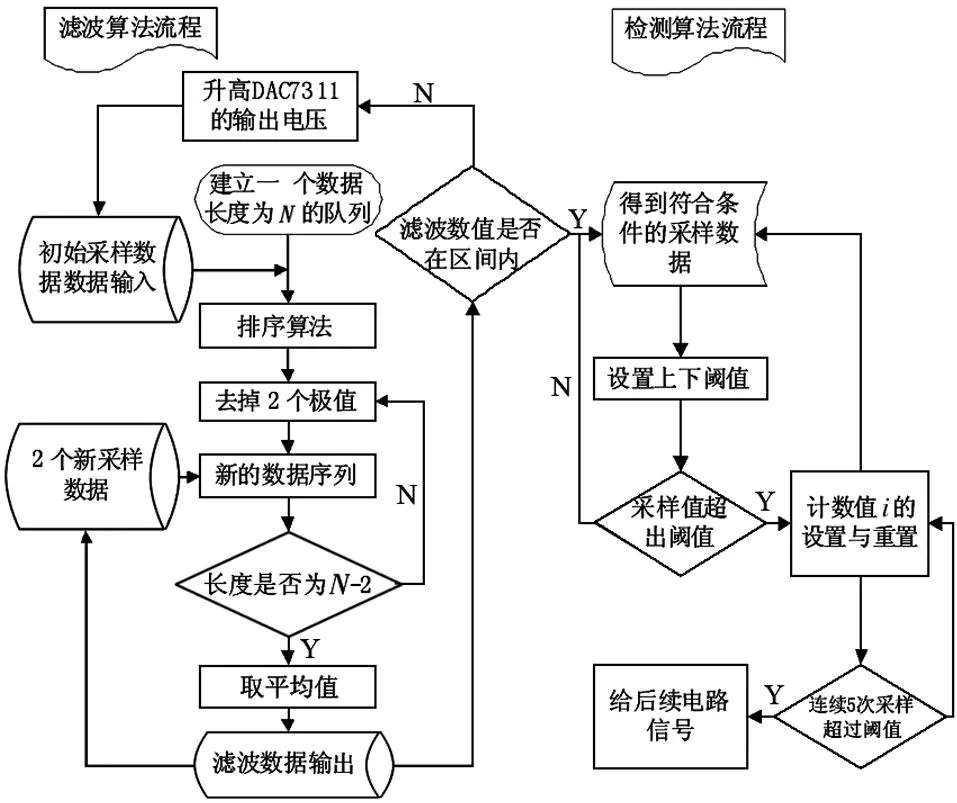
图5 滤波算法和检测算法流程图Fig 5 Flow chart of filtering algorithm and detection algorithm
3.1滤波算法设计
数字滤波可以有效提高采样的精确度,本系统设计的滤波算法结合滑动滤波算法和脉冲干扰算法的优点,流程如图5所示。假设初次采样的样本数目为N,则存在N个采样值,X1,X2,X3,…,Xn。算法实现过程如下:
1)初次采样使用排序算法把N个采样点按从小到大排列得到新的序列Y1,Y2,Y3,…,Yn。
2)去掉Y1和Yn,剩下的n-2个数值取平均值作为滤波输出。
3)新的一次滤波时,获取2个新的采样值,插入到上次采样后的n-2个数值中。
4)重复步骤(2),(3)。
本系统的滤波算法,能有效滤除脉冲干扰,保证数据平滑性的同时具有较高的时效性,能够快速反映环境变化对系统造成的影响,除了初次采样需要完整的排序算法,非初次采样的排序,只需要将数值插入到排好序的采样样本中,降低了算法计算周期。
3.2检测算法设计
为检测移动金属对磁传感器输出造成的变化,通过将采样电压控制在幅值中段区间来方便检测。不同环境下传感器输出电压不同,利用DAC7311输出电压控制采样电压达到中段区间,然后进入检测算法。系统用到检测算法是根据采样得到的电压设定合适的阈值,再实时监测采样电压,如图5所示。这里以采样电压高于上限阈值为例:
1)当检测到采样电压高于阈值,储存该电压值;
2)重新设定阈值,计数器加1,延迟0.1 s;
3)再一次采样当前电压值,若采样电压值高于阈值重复步骤(2),(3),若采样值在阈值范围内,计数器归0;
4)若计数器达到5,则认为有目标经过,给与后续电路信号低于阈值的情况相同的方式处理,阈值需要根据多次的实验才能确定,计数器的次数,可以根据实际情况作出调整。
4实验结果与分析
运动目标由人携带金属物体代替,金属物体选用常规格的灭火器。检测位置方向与敏感轴方向如图6所示。
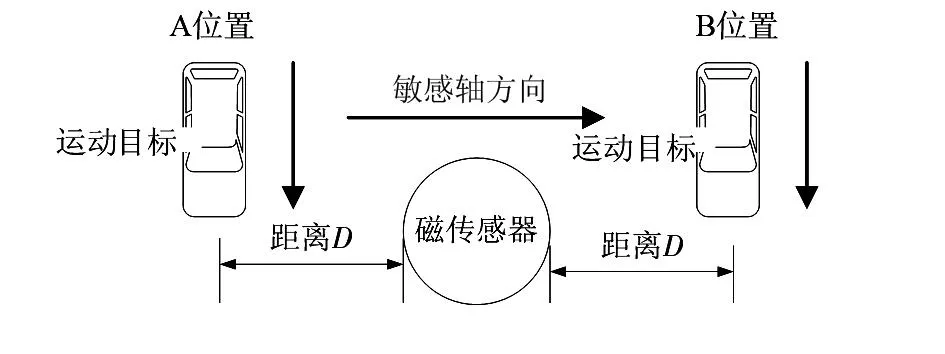
图6 检测方式Fig 6 Mode of detection
对应不同的距离D和不同的位置,检测到的波形变化如图7所示。
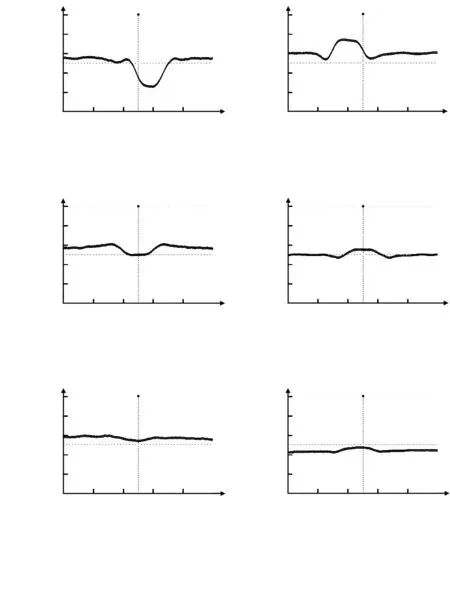
图7 敏感轴方向和反方向检测图Fig 7 Detection diagram in sensitive axis direction and the opposite direction
从图7中可以看到,波形浮动随着检测距离的增加逐渐减少。最后做LED灯的测试,判断有目标经过时,点亮LED代替引爆信号。在不同的距离各做8次测试,测试结果:测试距离为1.0 m,成功次数为8次;测试距离为1.5 m,成功次数为7次;测试距离为2.0 m,成功次数为2次。距离越近成功概率越高,距离到2.0 m时,系统无法正常检测到。这同单片机处理数据的速度、检测算法和采样精度都有关系,说明检测算法的阈值对实验结果有很大的影响。单片机自带模/数转换是10位的采样精度,这意味着当满幅的电压为5 V时,单片机能够得到的最小采样精度是5/210≈4.9 mV,同时设定的阈值有40 mV,这就导致一些人眼可以观察到的波动,单片机可能会错过,无法正常检测出来。
5结束语
本文介绍了一种基于磁传感器的磁引信探测系统的设计方法,设计了可控的二级放大电路,提高了磁传感器的探测距离,对于小型的金属目标具有良好的探测效果。测试结果显示:本设计可以达到预期的探测效果,证明了方案的可行性,为后续研究奠定了一定的基础。
参考文献:
[1]陈晓宇.激光近炸引信目标探测与判别技术[D].西安:西安电子科技大学, 2013.
[2]于静, 孔敏, 王冬梅.基于电容传感器的电容近炸引信炸高散布研究[J].传感器与微系统, 2013, 32(7):29-31.
[3]杨晓浩.地磁信号测姿技术在弹道修正引信中的应用[D].南京:南京理工大学, 2006.
[4]王震, 米东, 徐章遂.磁阻传感器在弱磁测量中的应用研究[J].仪表技术, 2007(6):70-71.
[5]Versluijs J J, Bari M A, Coey J M D.Magnetoresistance of half-metallic oxide nanocontacts[J].Physical Review Letters, 2001, 87(2):026601.
[6]李栋.火箭弹用磁强计及姿态测试系统的研究与设计[D].太原:中北大学, 2014.
[7]王丽颖, 支炜, 孙红霞, 等.基于 HMC1022 磁阻传感器的数字电子罗盘的设计与实现[J].电子测量技术, 2009(1):108-111.
[8]伍灵杰.数据采集系统中数字滤波算法的研究 [D].北京:北京林业大学, 2010.
Design of magnetic proximity fuze detection system based on magnetic sensor
ZHU Hao-jie, QIN Hui-bin
(Hangzhou Dianzi University,Institute of Electron Devices & Application,Hangzhou 310018,China)
Abstract:Magnetic proximity fuze detection system which based on magnetic sensor is suitable for non-contact detection system.To enhance range of detection and stability, controllable amplifier filtering circuit and set-reset circuit are designed for the system.In order to improve timeliness and accuracy of detection,improved filtering algorithm and detection algorithm is proposed.System which is improved and optimized has good stability and adaptability, and it effectively detects moving of ferromagnetic objects, feasibility of the scheme is proved, and lay foundation for future studies.
Key words:magnetic proximity fuze; controllable amplifier filtering circuit; filtering algorithm; detection algorithm
DOI:10.13873/J.1000—9787(2016)03—0115—03
收稿日期:2015—06—18
中图分类号:TJ 43; TP 212
文献标识码:A
文章编号:1000—9787(2016)03—0115—03
作者简介:
祝豪杰(1989-),男,浙江宁波人,硕士研究生,主要研究方向移动目标中近程探测、识别技术。