智能磁致伸缩液位测量仪设计
2016-06-13 08:43杨星红陆晓春
传感器与微系统 2016年3期
杨星红, 黄 皎, 陆晓春, 尹 涛
(河海大学 物联网工程学院,江苏 常州 213022)
智能磁致伸缩液位测量仪设计
杨星红, 黄皎, 陆晓春, 尹涛
(河海大学 物联网工程学院,江苏 常州 213022)
摘要:针对当前液位测量监测系统中存在的多种问题,设计了一种高精度的智能磁致伸缩液位测量仪。系统采用ARM Cortex—M4系列的EK—TM4C1294NCPDTI芯片作为核心控制处理器,包含电源模块、时钟模块、激励信号模块、信号检测模块、以太网接口模块、故障报警模块、数据存储模块等。实现了测量精度高、稳定性好、人机交互友好,具有网络化通信功能的智能液位测量仪。
关键词:磁致伸缩; ARM Cortex—M4; 智能; 网络化
0引言
现如今部分工业现场环境恶劣,对测量设备提出了诸多要求,如需要耐高温高压、抗磨损、腐蚀等,工作人员也很难近距离操控测量流程,这使得测量过程不那么轻易可行。磁致伸缩液位传感器因其具有大量程、高精度、易维护、免定标、长寿命和强适应性等特点,目前广泛应用于工业液位测量领域,满足了工业现场对液位测量的环境要求[1]。
由于我国自行研制的液位测量仪虽然具有一定的测量精度,能够满足基本测量要求,但其在操作、人机交互、数据容量和兼容性上均存在一定的局限性[2]。传统液位测量仪只配备了传统的工业现场总线方式,这对远距离的控制和访问造成了困难,使得测量数据无法得到实时监控。
本文设计了一种智能磁致伸缩液位测量仪,具有网络化接口,能够实现实时数据传输与存储,实时监测与报警功能。
1测量仪总体概述
1.1测量原理
如图1所示为磁致伸缩传感器结构图,包括传感器头部、探测杆、活动磁铁和阻尼器。主控制模块向波导丝上施加激励驱动脉冲,波导丝周围瞬时产生电磁场,与磁铁产生的轴向磁场叠加,形成螺旋磁场,由于磁致伸缩效应,扭转波发生瞬时形变产生扭转波,该扭转波以已知的固定超声波速度向两端传播[4],一端被阻尼器吸收,另一端被线圈检测到。传感器头部感应线圈检测到扭转波信号时,该时刻与驱动脉冲产生时刻的时间间隔为扭转波传播时间,该时间与扭转波波速乘积即为活动磁铁的位移,即
s=v×t,
(1)
式中s为测量的位移,m;v为扭转波传播的速度,m/s;t为扭转波传播时间,s。

图1 磁致伸缩传感器结构图Fig 1 Structure diagram of magnetostrictive sensor
1.2测量仪系统设计
如图2所示为系统的总体结构框图。智能磁致伸缩液位测量仪以TM4C1294NCPDTI为主控制器,包含电源模块、时钟复位模块、激励脉冲产生模块、回波信号处理模块、
故障报警模块、触摸屏显示模块、数据存储模块以及以太网接口通信模块等。
本系统采用基于ARM Cortex—M4系列的32位处理器,频率可达120 MHz,可提高捕获回波脉冲的分辨率,提高时间间隔捕获的准确性,自带睡眠模式,超低功耗。内部集成Thumb 2指令集,内置10/100 M以太网媒体访问控制器与物理层[5]。激励脉冲触发传感器进行液位测量,信号处理模块将采集到的信号进行处理送至处理器捕获;10/100 M以太网模块将测量结果传送至工业以太网;报警模块根据不同的错误信息触发扬声器报警;控制阀模块根据检测到的液位信息,及时调整阀、泵的开闭;数据存储单元采用SD卡接口,将大量的测量数据和报警信息以FAT32格式进行保存;触摸屏模块为用户提供友好的交互界面,直观显示测量信息以及更改参数设置。
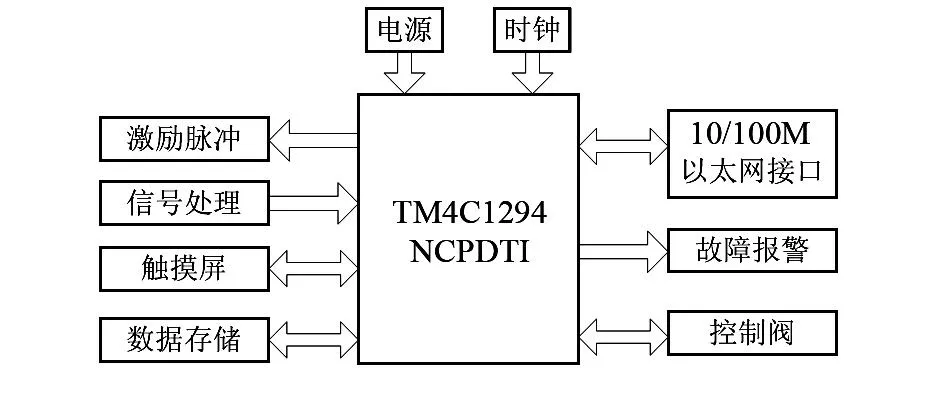
图2 智能磁致伸缩液位测量仪总体结构框图Fig 2 Overall structure block diagram of intelligent liquid level gauge of magnetostrictive
2测量仪硬件模块设计
2.1激励脉冲模块
根据磁致伸缩传感器的测量原理,为使波导丝产生较大的扭转形变,驱动电流脉冲必须足够大,一般为2A左右[6],因而,需增设如图3所示激励脉冲驱动电路。激励脉冲经三极管射极跟随缓冲电路将脉冲信号进行放大,通过N沟道增强型MOSFET管连接磁致伸缩位移传感器波导丝输入端,构成回路以驱动传感器工作。
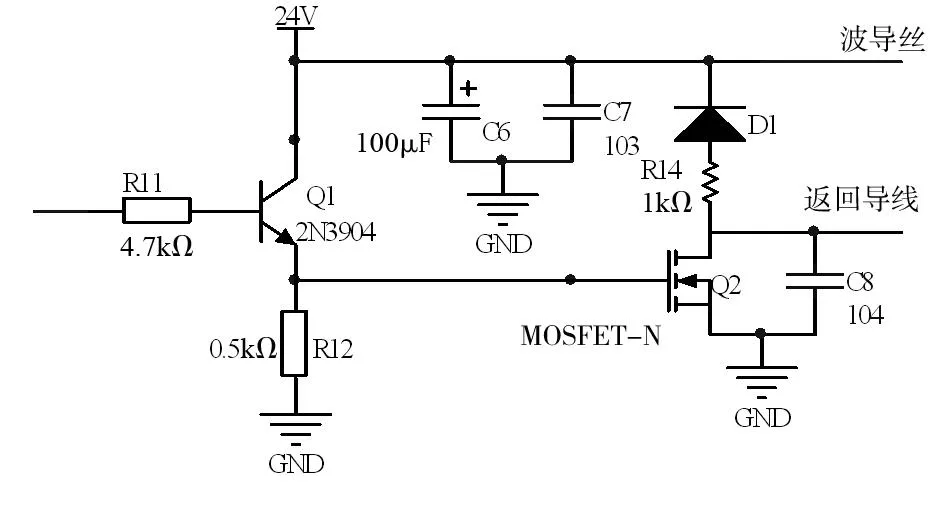
图3 激励脉冲驱动电路Fig 3 Excitation pulse drive circuit
2.2信号放大电路
如图4所示为两级信号放大电路。由于扭转波经过感应线圈感应变换后的回波信号会发生衰减,幅值较小(约2 mV)、频率较高、并且极易被噪声淹没[7],因而,选用MAXIM公司的具有高输入阻抗、高带宽、稳定的放大倍数和带宽增益积为200 MHz的双通道运算放大器MAX4453[8]。考虑到传感器的工作环境比较恶劣,存在外部扰动、噪声干扰、共模干扰等,因此,采用双端输入,单端输出的差动放大电路和同相放大电路对回波信号进行多级放大。
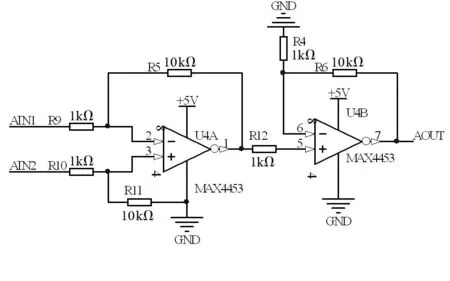
图4 两级信号放大电路Fig 4 Two-stage signal amplifier circuit
差动放大电路放大差模信号,抑制共模信号,同相放大电路则继续对回波信号的幅值进行放大[9]。经过两级放大后,又串接两级同相放大电路,总闭环增益可达1 100倍,回波信号的可检测性大大提高,使得传感器的稳定性也大大增强。
2.3触摸屏模块
触摸屏模块设计了多个工业化测量界面,包含测量数据显示界面,参数设置界面、报警信息显示界面等。参数设置界面包含液位测量上、下限值,测量数据与触摸屏实时交互,当超过上下限设定的值时,就会启动蜂鸣器报警,同时关闭或启动相应的控制阀。报警信息显示界面提供当前报警信息显示和历史信息查阅功能。
3测量仪软件模块设计
3.1总体测量流程
该液位测量仪有实时测量、参数设置、数据查询、通道测试共4个工作模式。当仪表处于实时测量模式时,其测量流程如图5所示。
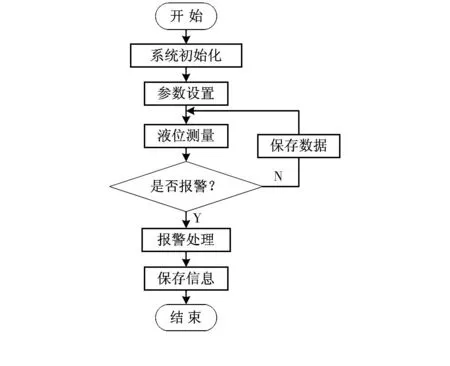
图5 智能磁致伸缩液位测量仪实时测量工作流程图Fig 5 Real-time measurement work flow diagram of magnetostrictive liquid level gauge
3.2数据存储模块
为方便用户读取测量仪历史数据和警告信息,程序采用FAT32文件格式写入SD卡。该文件系统完全采用标准C语言编写且源代码开放,小巧精悍,只占用4 kB内存,功能齐全[10]。
测量仪处理模块采用SPI通信方式读写SD卡中的液位测量数据。程序设计时,主控制器使CS引脚为低电平,SD卡使能并处于丛机地位,SPI总线读写存储器中的液位测量数据。主控制器产生SCK时钟信号,同时通过SI和SO引脚将液位数据读出和写入存储器。部分SPI读数据程序如下所示:
unsigned char SPI_RecByte(void)
{
unsigned long ReadData=0;
SSIDataPut(SSI_BASE,0XFF);/*向SPI写一个0xFF,以产生读数据时钟*/
SSIDataGet(SSI_BASE,&ReadData);
return((unsigned char)ReadData);/*读取收到的字节*/
}
3.3网络通信功能模块
TCP/IP协议是Internet的基本协议,协议中定义了设备如何接入因特网,同时规定了设备间的数据传输标准[11]。在工业测量领域中,随着控制技术网络化的发展,TCP/IP协议运用逐渐增多,方便了设备之间、设备与监控平台之间的数据传输。
Modbus协议是工业上的事实标准,ModbusTCP是Modbus协议和TCP/IP协议协议在应用中的结合,液位测量仪的网络数据传输部分设计了ModbusTCP数据传输功能。
TCP/IP协议是众多网络协议的组合,为了能够满足多种协议功能的需求致使TCP/IP协议栈包含众多的协议,规模庞大。由于本系统中并不需要使用所有的网络通信功能,因此,对TCP/IP 协议栈进行精简,设计的协议栈满足需要又节约资源,其结构如图6所示。
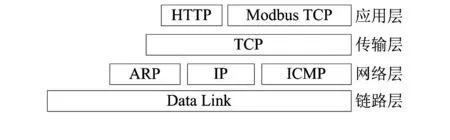
图6 协议栈层次结构设计Fig 6 Design of protocol stack hierarchy
本系统将监控终端作为Modbus TCP服务器。由于TCP是端对端的连接,在设计服务器程序时要为每一个连接建立一张TCB表,这张表记录了对应该连接的一些基本信息,包括通信双方的IP 地址、端口号、当前发送报文序号、ACK序号和最大传输报文长度等。TCP 初始化函数如下:
void tcp_init()
{
unsigned char socket_index;
for(socket_index=0;socket_index { initial_tcb(socket_index);∥初始化tcb表,将每一个连接的参数都恢复到默认值 initial_tcp_sendbuf(socket_index);∥初始化发送缓存函数 initial_tcp_recbuf(socket_index);∥初始化接收缓存函数 } Time_Tcp.Enable=true; Time_Tcp.Value=1;∥定时1 s } 4实验结果 实验设计量程为2 m 的磁致伸缩位移传感器,将传感器浮子磁铁分别置于位移为50,100,150 mm处,得到6组测量的实验数据列于表1中。 表1 6组位移测量数据 从表1的实验数据分析可知,所测位移数据均在实际位移附近小范围波动,其相对误差在0.08 %之内,精度可达0.02 %F.S,其精度符合测量标准。 5结论 实验数据表明:本文设计的智能磁致伸缩液位测量仪达到了较高的测量精度,具有较好的重复性和稳定性,同时还具有强大的数据存储和传输功能。该仪表不仅满足了用户的需求,同时满足了互联网的发展要求,具有较高的使用和推广价值 参考文献: [1]李怀洲,孙海燕,罗祖顺,等.磁致伸缩位移传感器的研究与应用[J].电气自动化,2006,27(5):58-59,66. [2]余超,周新志,熊胤琪.Fe83Ga17磁致伸缩位移传感器激励信号的ANSYS分析及DSP实现[J].仪表技术与传感器,2012(8):4-6,80. [3]于希文,赵辉,刘伟文,等.磁致伸缩位移传感器感应信号的分子调理[J].大连交通大学学报,2013,34(3):56-60. [4]Texas Instruments.TM4C1294NCPDT datasheet[EB/OL].[2014—06—18].http:∥www.ti.com. [5]冯建,赵辉,刘伟文,等.磁致伸缩位移传感器电路系统的设计[J].电子测量技术,2010,33(1):11-13. [6]冯希辰,周新志,余超.磁致伸缩位移传感器回波信号滤波器设计[J].传感器与微系统,2013,32(6):104-107. [7]Maxim Integrated.MAX4453 datasheet[EB/OL].[2005—09—10].http:∥www.maxim integrated.com. [8]杨宗旺,周新志.磁致伸缩位移测量的研究与回波信号的分析与处理[J].仪表技术与传感器,2012(11):177-180. [9]李世奇,董浩斌,李荣生.基于FatFs文件系统的SD卡存储器设计[J].测控技术,2011,30(12):79-81. [10] Behrouz A Forouzan.TCP/IP protocol suite[D].北京:清华大学出版社,2009. Design of intelligent magnetostrictive liquid level gauge YANG Xing-hong, HUANG Jiao, LU Xiao-chun, YIN Tao (College of Internet of Things Engineering,Hohai University,Changzhou 213022,China) Abstract:Aiming at several problems in liquid level measuring and monitoring system,a high-precision intelligent magnetostrictive liquid level gauge is designed.The system uses ARM Cortex-M4 EK—TM4C1294NCPDTI chip as core control processor,includes of power supply module,clock module,excitation signal modules,signal detection module,ethernet interface module,fault alarm module,data storage module,etc.Realize intelligent liquid level gauge with networked communication function,which has high precision,good stability and friendly human-computer interface(HCI). Key words:magnetostrictive; ARM Cortex—M4; intelligent; networked DOI:10.13873/J.1000—9787(2016)03—0118—03 收稿日期:2015—06—24 中图分类号:TP 23 文献标识码:A 文章编号:1000—9787(2016)03—0118—03 作者简介: 杨星红(1990-),女,江苏南通人,硕士研究生,主要研究方向为网络化智能仪表。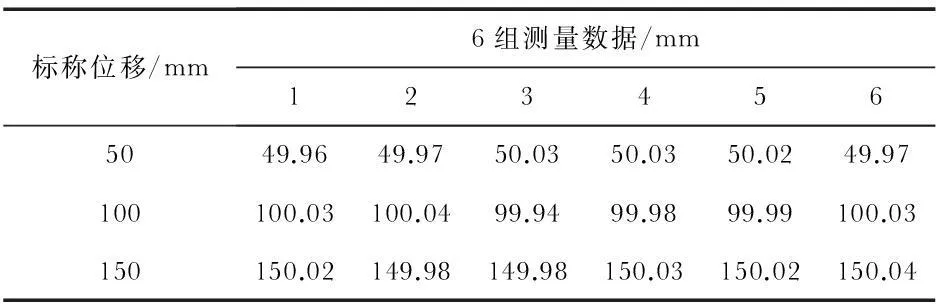
猜你喜欢
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
新闻传播(2016年11期)2016-07-10
河北大学学报(自然科学版)(2015年1期)2015-02-27
中国人民大学学报(2014年5期)2014-04-16
食品工业科技(2014年15期)2014-03-11