光纤Bragg光栅可变灵敏度液位传感器设计*
2016-06-13 08:43赵振刚梁仕斌
传感器与微系统 2016年3期
李 凯, 蔡 陈, 赵振刚, 梁仕斌, 李 川
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.云南电网有限责任公司 电力科学研究院 研究生工作站,云南 昆明650217;3.云南电力试验研究院(集团)有限公司,云南 昆明 650217)
光纤Bragg光栅可变灵敏度液位传感器设计*
李凯1,2, 蔡陈1, 赵振刚1, 梁仕斌3, 李川1
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.云南电网有限责任公司 电力科学研究院 研究生工作站,云南 昆明650217;3.云南电力试验研究院(集团)有限公司,云南 昆明 650217)
摘要:为了实现对液位的多灵敏度状态下监测,设计了一种利用光纤Bragg光栅(FBG)的可变灵敏度液位传感探头。将薄膜片上的液体压力通过传压杆传送给悬臂梁,将FBG粘贴于悬臂梁上表面,利用灵敏度变换阀改变悬臂梁长度而改变传感器的灵敏度。对悬臂梁进行有限元仿真优化计算,得到悬臂梁的变形特性。悬臂梁长度分别调节为100,90,80 mm状态下,最大变形出现在悬臂梁尖端,分别为4.266,3.457,2.736 mm,裸光栅粘贴处,对应的灵敏度分别为2.0,1.5,1.0 mm/m,实现灵敏度变换。
关键词:液位; 传感器; 有限元; 光纤Bragg光栅; 可变灵敏度
0引言
工业中如储油罐等,对于液位的测定十分普遍,而由于工业环境较为复杂,所以,利用光纤Bragg光栅(FBG)进行液位测定,不仅能够抵抗外界的电磁和噪声干扰,还可以有效避免带电测定带来的安全问题,因此,工业中可以利用FBG对液位进行有效测定。殷小峰等人对弹性膜片进行封装,研制出了一种压力增敏FBG传感器,并对其进行了测试,得到传感器的参数特性[1]。王宏亮等人在设计了一种波纹管式FBG液位传感探头的基础上,进一步利用温度补偿光栅补偿温度造成的影响,并对传感探头性能进行了测试,此外,其设计的E膜片与悬臂梁相互组合的一种FBG液位传感器,建立了FBG中心波长随液面发生变化的参考数学模型,并通过分析得出,通过调整悬臂梁等相关参数可以实现对灵敏度和量程的调整[2,3]。杨淑连等人设计了一种新型的双FBG液位传感器,可以有效抵抗交叉敏感的问题。此外,他们在传感器的基础之上通过对反射谱带宽的分析得到液位的高度,并验证了反射谱与贷款之间具有较好的线性关系[4,5]。张玉、童峥嵘等人也对光纤液位传感器探头的光学特性进行了分离。论述了光纤传感探头和光源对传感器性能的影响,并分析了相应的光学和抗腐蚀特性[6,7]。
本文针对传感器大量程与高灵敏度之间的矛盾,基于一种薄膜片与悬臂梁相连测试液位的FBG液位传感器探头结构,增加灵敏度变换阀,通过改变悬臂梁长度而改变传感器探头的灵敏度与量程,并利用ANSYS对悬臂梁仿真对其有效性加以验证。
1传感器工作原理
对于液位的测试,设计了一种基于悬臂梁的可变灵敏度的FBG液位传感器,其具体结构如图1所示。
将传感器探头放入液体之中,而液体对传感器探头上表面的薄膜片产生压力,薄膜片能够敏感地将压力通过传压杆传送给悬臂梁顶端,悬臂梁发生形变。由于将FBG粘贴于悬臂梁表面,所以,悬臂梁发生形变后会造成FBG的栅距发生变化,从而使Bragg中心波长发生变化,根据Bragg中心波长的变化量来计算液体的深度,从而实现对液位的测定[8],工作原理如图1所示。
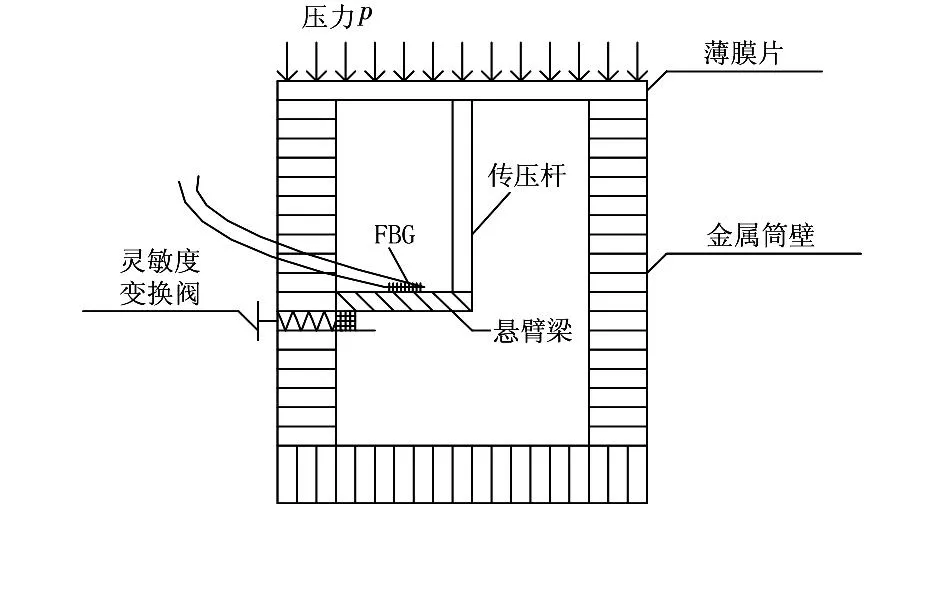
图1 FBG可变灵敏度液位传感器原理图Fig 1 Principle diagram of FBG variable sensitivity liquid level sensor
在传感器的使用过程中,当深度较浅时,需要较高的灵敏度对液位进行测试,而这时传感器中的悬臂梁长度较短,可以提高其灵敏度。当传感器需要对较深液位进行测试时,可以降低灵敏度以获得较大的量程,而这时需要悬臂梁较长。通过改变灵敏度变换阀,随着悬臂梁下方铁块在轨道上的位置变化,可以改变悬臂梁的长度,从而改变传感器的灵敏度和量程,实现对于不同深度的液位的高灵敏度测定。
2传感器仿真优化设计
由于FBG液位传感器主要将液体对传感器探头顶部薄膜片的压力通过传压杆传给悬臂梁,然后通过悬臂梁带动裸光栅,再通过光栅的波长移位来反映液体压力的不同,从而反映液位的深度。而可变灵敏度的实现正是通过灵敏度变换阀来改变悬臂梁的长度来实现改变整个传感器的灵敏度的,所以,对悬臂梁进行有限元仿真分析。
悬臂梁材料Q235碳素钢,Q235基本材料特性如下:弹性模量:E=206 GPa=206×109 Pa=2.06×1011N/m2,泊松比μ=0.25,屈服极限σs= 235 MPa,安全因数ns=1.5 ,密度ρ=7.8×103kg/m3。所设计的悬臂梁尺寸如图2所示,悬臂梁厚2 mm,宽20 mm,初始长度100 mm。
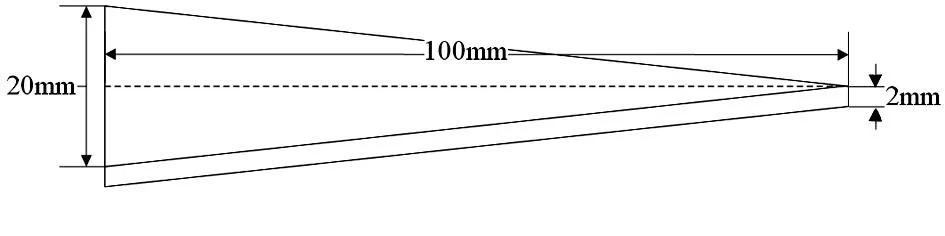
图2 悬臂梁的尺寸Fig 2 Size of cantilever
根据液体压强公式:p=ρgh,压力公式F=pA的特点,由于顶部表面积A为0.1 m2,液体密度ρ为1 000 kg/m3,液面h为1 m,g=10 m/s2,经过计算,压力F为100 N,通过传压杆在悬臂梁尖端施加y(垂直向下)方向100 N的力,对原始长度100 mm的悬臂梁进行仿真,仿真结果如图3所示。

图3 悬臂梁的仿真变形Fig 3 Simulation deformation of cantilever
通过仿真可以发现,越接近悬臂梁尖端的方向,发生变形越大。首先,由于传压杆的力作用在悬臂梁尖端,而另一端被约束,所以悬臂梁尖端作为自由端,在力的作用下,必然发生更大的变形。其次,由于尖端形状细尖的特点,也会造成其在力的作用下变形较大。
在x方向上,通过灵敏度变换阀进行调节,悬臂梁长度分别为100,90,80 mm。假设液面为高度为1 m,在悬臂梁尖端施加y(垂直向下)方向100 N的力,选取图2中的虚线作(悬臂梁中轴)为坐标横轴,如图4(a),(b),(c)所示,分别画出悬臂梁长度分别调节为100,90,80 mm时的悬臂梁中轴上的路径的变形图。悬臂梁分别为100,90,80 mm长度且液面深度为1 m的情况下,最大变形量均出现在悬臂梁尖端,分别为4.266,3.457,2.736 mm。
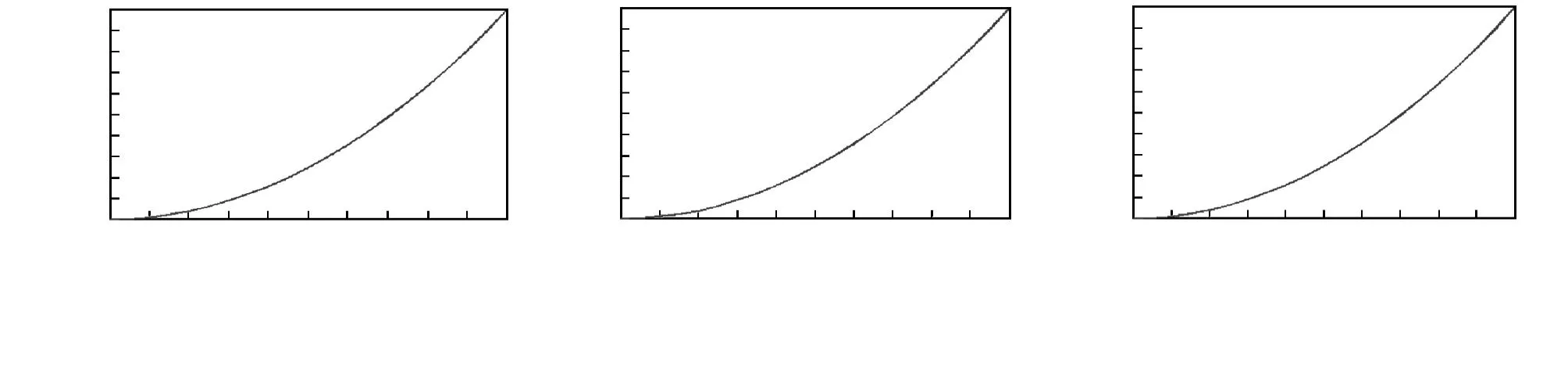
图4 不同长度悬臂梁表面中线变形图Fig 4 Midline deformation in surface of 100,90,80 mm cantilever
将FBG粘贴于距尖端30 mm处,对于长度分别为100,90,80 mm的悬臂梁,在1 m的液位下,此处对应变形分别为2.07,1.55,1.01 mm。利用有限元分析软件,分别模拟不同长度的悬臂梁在不同的液位深度下所受到的力及相应的变形情况,见表1,并绘制悬臂梁在不同长度下的液位—变形量图,见图5。从图中可以发现,在每个悬臂梁长度下,传感器都具有很好的线性度,当悬臂梁分别为100,90,80 mm长度下,灵敏度分别为2.0,1.5,1.0 mm/m,通过灵敏度变换阀,变换悬臂梁的长度,从而实现了对于传感器探头灵敏度的变换。
3结论
针对工业中对于液位测定的复杂环境,避免带电测定的干扰、材料腐蚀等问题,本文设计了一种FBG可变灵敏度液位传感器。所设计的FBG可变灵敏度液位传感器探头,利用液体对传感器探头表面的压力,通过传压杆将压力传递给悬臂梁,悬臂梁发生变形从而带动光栅栅距变化来对液位进行测定。有限元计算发现:悬臂梁尖端变形较大,分析由于尖端没有进行约束,在压力作用下必然出现较大变形。改变悬臂梁的长度,当悬臂梁长度分别达到80,90,100 mm,液位0.5~1.5 m下进行有限元计算,敏度分别为:2.0,1.5,1.0 mm/m,且均具有良好的线性。实现了利用灵敏度变换阀改变悬臂梁长度,进而改变传感器探头的灵敏度。
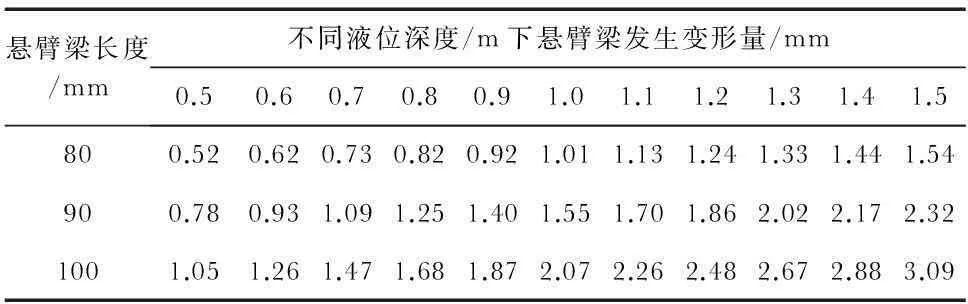
表1 不同长度悬臂梁随液位深度发生变形情况统计表
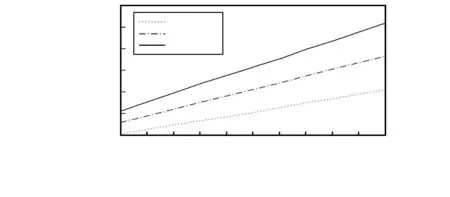
图5 悬臂梁在不同长度下的液位—变形量Fig 5 Liquid level-deformation diagram at different lengths of cantilever
参考文献:
[1]殷小峰,姜暖,杨华勇,等.基于弹性薄片封装的高灵敏度光纤光栅压力传感器[J].光电子·激光,2011,22(5):681-684.
[2]王宏亮,王琳,贾振安,等.一种实用的光纤光栅液位传感器[J].光电子·激光,2009,20(10):1275-1277.
[3]王宏亮,邬华春,冯德全,等.光纤光栅液位传感器的研究[J].光电子·激光,2009,20(12):1573-1575.
[4]杨淑连,申晋,李田泽.基于双光纤布喇格光栅的液位传感器[J].压电与声光,2009,31(6):811-813.
[5]杨淑连,盛翠霞,魏芹芹,等.基于啁啾布喇格光栅的液位传感器[J].强激光与粒子束,2013,25(11):2869-2872.
[6]张玉,孙旋,刘电霆.光纤传感器在液位检测中的应用[J].传感器与微系统,2011,30(6):123-125.
[7]童峥嵘,杨娇,曹晔.基于腐蚀型多模光纤的干涉型传感器实现温度和液位同时测量[J].光电子·激光,2014,25(1):118-122.
[8]李川.光纤传感器技术[M].北京:科学出版社,2012.
[9]Li Chuan,ZhaoYonggui.Strain and back cavity of tunnel engineering surveyed by FBG strain sensors and geological rad-ar[J].Journal of Intelligent Material Systems and Structure,2009,20(18):2285-2289.
Design of variable sensitivity liquid level sensor for FBG*
LI Kai1,2, CAI Chen1, ZHAO Zhen-gang1, LIANG Shi-bin3, LI Chuan1
(1.Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China;2.Graduate Workstation, Electric Power Research Institute, Yunnan Power Grid Limited Liability Corporation,Kunming 650217,China;3.Yunnan Electric Power Research Institute (Group) Co Ltd,Kunming 650217,China)
Abstract:In order to achieve level of variable sensitivity monitoring is designed using a fiber Bragg grating(FBG) with variable sensitivity level probe.Liquid pressure on film is transmitted to cantilever beam through pressure bar, FBG is pasted on upper surface of cantilever beam,using sensitivity shift valve to change cantilever length,so as to change sensitivity of sensor.Calculated deformation properties of the cantilever beam by finite element simulation and optimization.The length of cantilever beam are adjusted to 100 mm, 90 mm, 80 mm.In all the above-mentioned states,the maximum deformation occurs in the tip of cantilever beam, which are 4.266,3.457,2.736 mm respectively.Corresponding where bare grating pasted, the sensitivitues are 2.0,1.5,1.0 mm/m,to achieve sensitivity transformation.
Key words:liquid level; sensor;finite element; fiber Bragg grating(FBG); variable sensitivity
DOI:10.13873/J.1000—9787(2016)03—0121—03
收稿日期:2015—06—09
*基金项目:云南省应用基础研究计划资助项目(2013FZ021);国家自然科学基金资助项目(KKGD201203004)
中图分类号:TH 741
文献标识码:A
文章编号:1000—9787(2016)03—0121—03
作者简介:
李凯(1990-),男,辽宁阜新人,硕士研究生,主要从事监测对象的有限元分析与光纤传感技术研究。
李川,通讯作者,E—mail:xsxzli@126.com。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
纺织科学研究(2021年1期)2021-12-03
上海节能(2020年3期)2020-04-13
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
汽车实用技术(2015年8期)2015-12-26
汽车维护与修理(2015年2期)2015-02-28