基于超声波测距的塔吊防碰撞探测器设计*
2016-06-13 08:43许景波沈永滨崔晓萌
传感器与微系统 2016年3期
许景波, 赵 宇, 沈永滨, 崔晓萌, 刘 泊
(哈尔滨理工大学 测控技术与通信工程学院,黑龙江 哈尔滨 150080)
基于超声波测距的塔吊防碰撞探测器设计*
许景波, 赵宇, 沈永滨, 崔晓萌, 刘泊
(哈尔滨理工大学 测控技术与通信工程学院,黑龙江 哈尔滨 150080)
摘要:针对塔吊作业防碰撞问题,设计了用于障碍物检测的防碰撞探测器。基于超声波测距原理,探测器可以对接近塔吊臂的障碍物主动检测,发出报警信息。从系统的构成、工作方式、探测器结构设计和安装布置等几方面进行了详细论述,通过Matlab仿真对设计结果进行了验证。该设计扩宽了探测器检测范围,通过多节点布置,对塔吊臂形成了封闭的三维保护区,有效避免事故发生,对于塔吊安全运行具有重要意义。
关键词:塔吊; 超声波测距; 防碰撞; 结构设计
0引言
随着建筑行业的发展,塔吊作为一种主要的搬运机械,越来越被广泛应用,然而,塔吊碰撞倾翻事故时有发生,面向塔吊防碰撞问题的研究也相继开展起来。现有的研究大多采用如下方法[1~4]:进行自身高度、幅度和回转角度等参数的检测,由无线组网技术将这些参数传递给周围塔吊,同时也接收其它塔吊传递来的参数。由周围塔吊和自身的位置状态信息,判断安全作业区域,进行预警、规划路径以及主动避让。这种方法要求通信链路必须可靠,如果产生数据包丢失,将对塔吊的安全作业带来隐患。此外,这是一种被动检测方式,对于障碍物则不能主动探测。
本文根据超声波测距原理设计了一种塔吊防碰撞探测器,它对进入保护区的障碍物能够主动探测,向主控室发出报警信息,使驾驶员能够及时采取措施进行避让。由于采取的是直接探测、总线连接方式,有效避免了已有方法的不足。
1超声波测距原理
由发射器发出一组超声波,当遇到障碍物时发生反射,接收器用来接收反射波,则得到发射器到障碍物的距离s为
s=t×v/2,
(1)
式中t为发射到接收所经历的时间,v为超声波波速,常温下为344 m/s。所以,测得超声波传播的时间就可以间接地得到距离[5,6]。
由于超声波方向性强,即垂直于发射表面的一定区域内能量集中,超出这一区域能量衰减很快,这就形成了波束角,一般在30°左右。而塔吊臂作业空间宽阔,需要在0°~180°范围内检测障碍物,要使用超声波传感器进行防碰撞保护,必须加宽其检测范围。探测器在塔吊臂上的安装形式如图1所示。
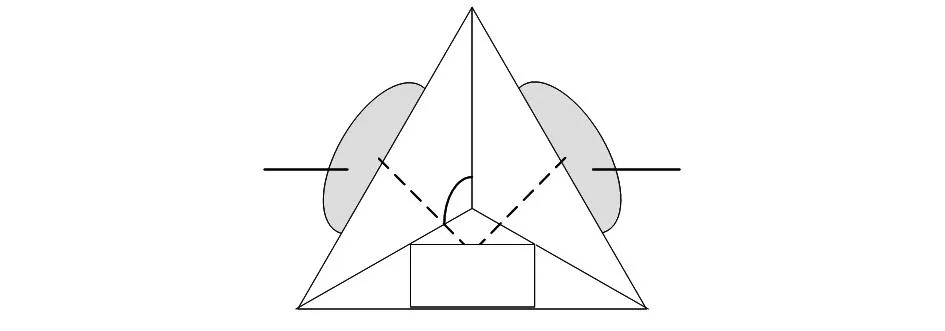
图1 探测器布置示意图Fig 1 Diagram of detectors layout
整个系统的硬件组成如图2所示。在每个节点中,为了防止超声波传感器之间的干扰,单片机采用时分复用的轮巡控制方式,即让每一只超声波传感器分时工作,每次单独完成一个测距周期,所以,各节点类似于不断进行扫描探测的数字式雷达[7]。节点单片机对各传感器检测距离进行仲裁,取最小值作为探测器的实际检测距离。各节点通过CAN总线不断向主控室发送探测信息,在小于安全距离时发出报警信号,以使驾驶员做出正确判断,及时避让。
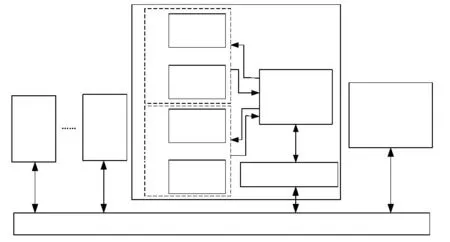
图2 硬件组成框图Fig 2 Block diagram of hardware composition
2探测器结构设计
为了有效拓宽检测范围,可以将超声波传感器布置成阵列的形式,在“传感器数量少,检测范围宽”的原则下,对传感器检测范围进行组合,形成一种探测器的结构。本文所设计的探测器是一种弧形十字支架结构,在支架的四端和中间交叉点分别布置5只超声波传感器,如图3(a)所示。设传感器的直径为D,波束角为θ,传感器之间相邻角度为φ,相邻弧长为l,则可根据弧长计算式(2),计算出此支架的半径R
(2)
传感器的相邻弧长l为
(3)
整个安装支架的弧长L和对应角度ψ为
L=3D+2l,ψ=3θ+2φ.
(4)
从横纵两个方向考虑,该探测器在空间上形成了锥度为ψ的锥形探测区间,如图3(c)所示。一般地,超声波传感器的波束角θ=32°,可以布置传感器相邻角度φ=6°,那么,整个探测器就形成了锥度为108°的探测空间,而探测半径为超声波传感器的最大测量距离。
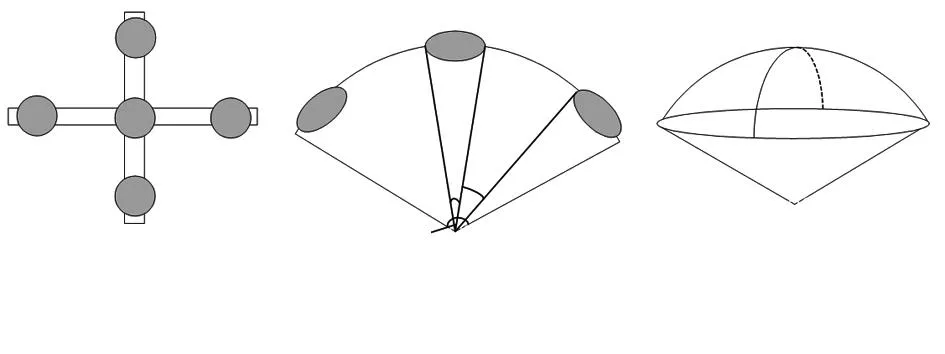
图3 探测器结构Fig 3 Detector structure
对于探测器的安装布置,要保证相邻探测器之间构成封闭的检测区间,以形成对塔吊臂的有效保护,如图4所示,ai为两个相邻探测器之间的距离,c为交点至超声波传感器的距离,h为交点距塔吊臂的高度,则可以得到ai的计算为
(5)
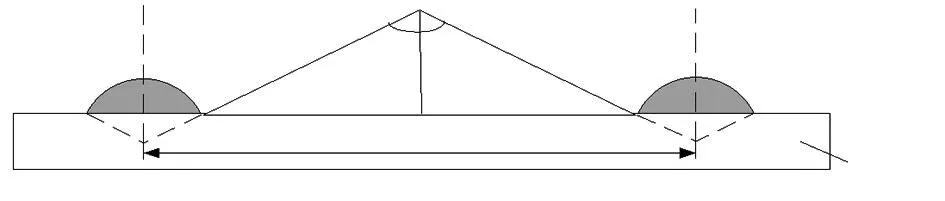
图4 探测器的安装作用区域Fig 4 Installation and effect area of detectors
改变安装间距ai或探测区间锥角ψ的大小,相应地可以改变交叉点至吊臂的高度h。塔式起重机安全规程中规定[8],两台起重机之间的最小架设距离应保证处于低位起重机的臂架端部与另一台起重机的塔身之间至少有2m安全距离,所以,应保证h≤2m。
设塔吊臂长为F,那么,在整个吊臂内所要安装的防碰撞节点数目n为

(6)
式中ROUND为四舍五入取整函数。
3仿真实例与分析
本文所选塔吊型号为QTZ63,起重臂长45m,要在其上布置超声波探测器,构成三维空间的保护区。这里,探测器上所选用的超声波传感器型号为DYA—35—5A,波束角为32°,该传感器最大探测范围5m,传感器直径为65mm。采用Matlab软件进行计算仿真。
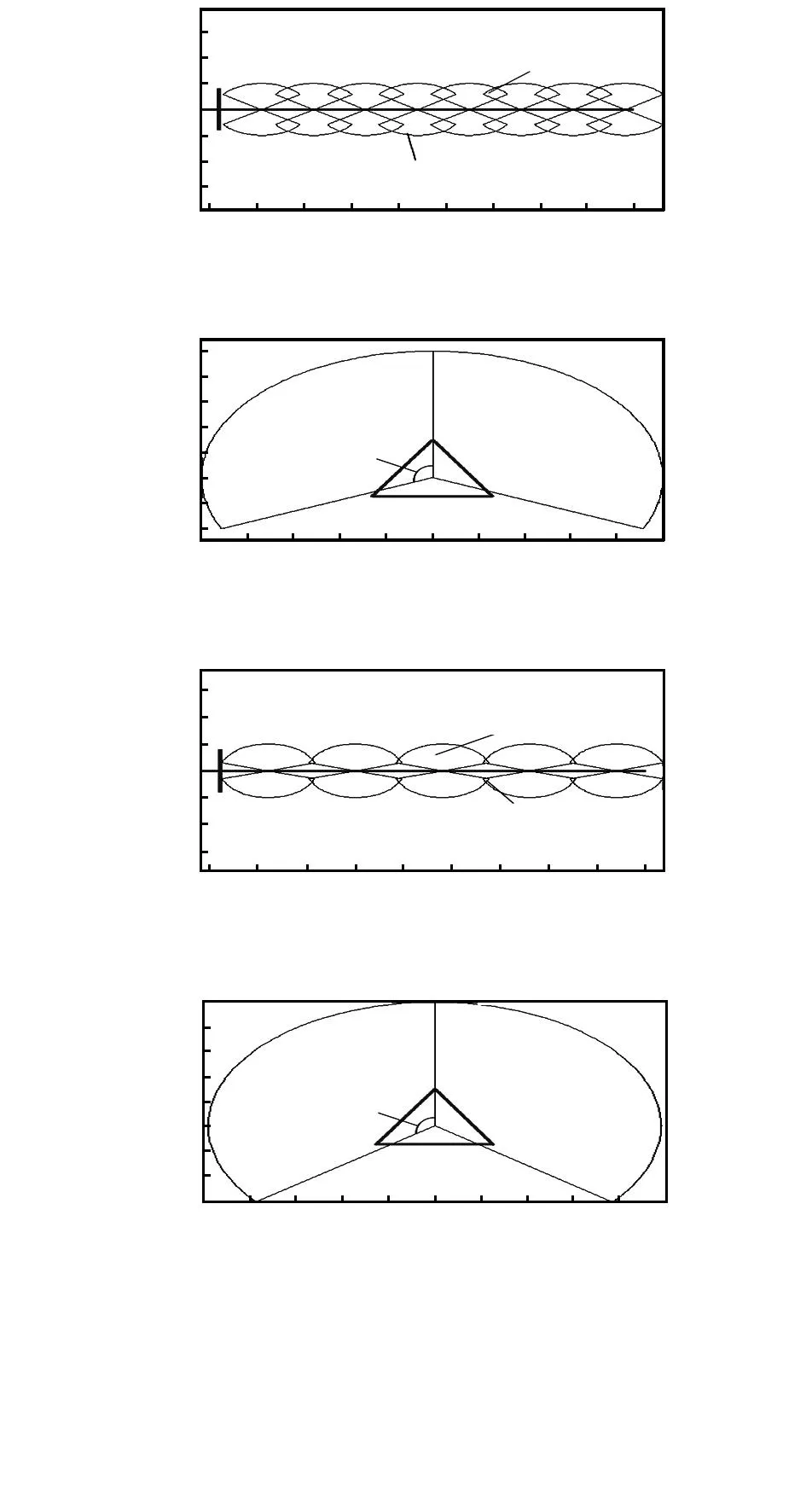
图5 Matlab仿真分析图Fig 5 Simulation analysis diagram by Matlab
按照本文所设计的由5只传感器构成的探测器,其支架半径为116.4mm,探测范围108°。按照式(5),限制h=2m,计算得出相邻探测器之间的间距为5.7m,那么,在QTZ63塔吊臂上需要布置8个这样的节点。塔吊臂的覆盖区域如图5(a)所示,可以看出这些节点形成了封闭的保护区,完全覆盖了整个吊臂。图5(b)是相应的剖面图,左右两个探测器共同作用,区域为-18°~198°。另外,可以增加探测器的作用范围,在横纵支架上各增加一只传感器,那么探测器的范围达到了146°。这时只需5个节点即可覆盖整个吊臂,传感器间距为9.3 m,如图5(c)所示,并且h只有1.38 m。图5(d)是相应的剖面图,其作用区域为-56°~236°。
从以上分析可以看出:如果探测器所用传感器数量少,则作用范围窄,而在整个塔吊臂上需要布置更多的节点。但要增加探测器作用范围,就需要更多的传感器,这样所需要布置的节点相对减少,这需要在工程实践中根据具体情况灵活掌握。
4结论
本文基于超声波测距原理设计了一种塔吊防碰撞探测器,它可以主动探测起重臂工作范围的障碍物,发出报警信息。从其工作方式上,可以看作一种数字扫描式“防碰撞雷达”,为塔吊防碰撞领域研究提供了一种新的思路。本文详细给出了探测器的结构设计和节点布置,通过仿真实验进行了验证,对于工程应用具有指导意义。
参考文献:
[1]Deen Ali,Ajmal MS,Ramesh Babu N,et al.Collision free path planning of cooperative crane manipulators using genetic algorithm[J].Journal of Computing in Civil Engineering,2005,19(2):182-193.
[2]沈孝芹,王积永,于复生,等.基于U盘存储的塔机安全数据记录仪的研制[J].中国机械工程学报,2008,6(2):249-252.
[3]张青春,王伟庚,孙志勇.Zig Bee技术在塔吊安全监测预警系统中的应用[J].计算机测量与控制,2014,22(8):2615-2618.
[4]韩九强,赵玮,魏全瑞.建筑塔吊群智能防碰撞系统[J].建筑安全,2008(2):12-14.
[5]琚晓涛,谷立臣.基于超声信息融合的塔吊防碰撞技术研究综述[J].传感器与微系统,2014,33(5):1-4.
[6]张作鹏,朱望强.基于超声波的高空作业车防碰撞设计[J].重庆科技学院学报:自然科学版,2010,12(3):143-145.
[7]韩博奇.车载倒车雷达系统的研究[D].哈尔滨:哈尔滨工业大学,2006.
[8]GB5144-2006.塔式起重机安全规程[S].中华人民共和国国家质量监督检验检疫局,2006.
Design of detector for tower crane anti-collision based on ultrasonic distance measurement*
XU Jing-bo, ZHAO Yu, SHEN Yong-bin, CUI Xiao-meng, LIU Bo
(College of Measurement-Control Technology & Communication Engineering,Harbin University of Science and Technology,Harbin 150080,China)
Abstract:Aiming at problem of tower crane anti-collision,a detector for obstacle detection is designed.Based on principle of ultrasonic distance measurement,detector can automatically detect obstacles close to tower crane arm and send alarm message.System composition,operation mode,detector structure design and installation are illustrated indetail,design result is verified by Matlab simulation.The design broadens detection range,and closed three-dimensional protection zone around tower crane arm is formed through multiple nodes arrangement,that avoids accident effectively and it is of great significance for safe operation of tower crane.
Key words:tower crane; ultrasonic distance measurement; anti-collision; structure design
DOI:10.13873/J.1000—9787(2016)03—0127—03
收稿日期:2015—07—09
*基金项目:2013年住建部研究开发资助项目(2013—R3—7)
中图分类号:TP 212
文献标识码:A
文章编号:1000—9787(2016)03—0127—03
作者简介:
许景波(1973-),男,黑龙江齐齐哈尔人,工学博士,教授,研究方向为精密测量、信号处理。
猜你喜欢
天津教育(2023年2期)2023-03-14
房地产导刊(2022年5期)2022-06-01
珠江水运(2021年15期)2021-11-23
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年7期)2021-07-16
四川水泥(2020年8期)2020-08-06
当代工人(2019年19期)2019-11-22
工程与建设(2019年4期)2019-10-10
环球市场(2017年5期)2017-04-12
专用汽车(2016年5期)2016-03-01